微创外科多自由度柔性超声手术刀研究进展
2024-01-24邬苗冯庆敏刘胜林陆雪松
邬苗,冯庆敏,刘胜林,陆雪松
1.华中科技大学同济医学院附属协和医院 生物医学工程研究所,湖北 武汉 430022;2.中南民族大学 生物医学工程学院,湖北 武汉 430074
引言
超声切割止血刀(简称“超声手术刀”)是微创外科手术中必要的切割与止血工具,其利用超声频率发生器使金属刀头产生高频机械振动,使接触组织细胞内水汽化、蛋白质氢键断裂、细胞崩解,以达到生物组织的切割、血管闭合与凝血等操作,具有出血少、对周围组织伤害小、术后恢复快等特点,是取代机械手术刀进行组织切割的主要电外科器械之一,有“无血手术刀”之称[1]。由于机械振动传播特征的限制,目前在微创手术中使用的超声手术刀均为长直杆状[2]。这一类工具仅具有绕自身轴线旋转和尖端钳口开合两个自由度,限制了手术操作的灵活性。柔性手术器械是相对刚性手术器械而言的,其灵活性要远高于刚性手术器械。多自由度(通常为4 个自由度)柔性手术器械具有灵活的腕关节,使得手术操作范围更大、医生操作舒适性更强。为完成更复杂、更灵活的微创手术操作,开发具有更多自由度的柔性超声手术刀十分有必要。但是受限于工艺技术等问题,目前大多数多自由度柔性超声手术刀研究还处在实验阶段,目前尚无关于微创柔性超声刀研究进展总结的相关综述。本文主要针对超声刀的发展历程以及现有的微创柔性超声手术刀的专利文献等进行分类总结,并对未来的发展趋势进行展望,以期促进柔性超声手术刀的发展。
1 超声手术刀的结构组成及工作原理
一套完整的超声刀设备主要由超声发生器和超声治疗手柄两大部分组成,见图1。其中,超声刀的手柄由换能器、变幅杆和能量传导(刀头)部分组成,位于换能器中心的压电陶瓷,起着将电能转化为机械能的关键作用,是控制刀头振动频率的核心元件。

图1 超声刀设备
超声刀的主要工作原理是利用超声波的传导以及超声波对组织的机械作用和空化效应。如图2所示,通电后,超声波发生器将低频电流转换成高频电流并传导至治疗手柄,手柄内的压电陶瓷将电能转换成机械能并传给变幅杆,变幅杆将超声波信号振幅扩大传导至刀头,刀头与组织蛋白接触,蛋白质受到振动产生能量,组织内的水分汽化促使组织分层,从而达到切割、凝闭和止血的作用。对比手术刀、电刀、激光刀等器械,超声刀有明显的应用优势,既拥有止血功能,又能在低温状态下工作,最大程度减少手术刀具对人体的损伤范围[3-6]。超声波在介质中传播时,介质中质点产生高频振动。研究证明,将质点加速度为50000 g (g 为重力加速度)的机械振动作用于生物组织时,被作用部位会迅速被切开而不伤及周围组织[7]。

图2 超声刀工作流程图
2 超声手术刀的研究进展
1927 年,研究者首先将超声波应用到生物体上,为治疗性超声波的发展打下了坚实的基础[8]。1967 年,世界上首台用来去除动物软组织的超声乳化仪被开发出来,自此人们开始认识到使用超声外科器械进行组织切割、消融或移除是一种更加安全有效的手术方式[9]。超声刀在临床上先后应用于超声洁牙、超声吸脂、超声肝脑瘤吸引、超声白内障乳化和超声骨科成形等,而后因其具有切口小、出血少、选择性碎裂、术后恢复快等突出优点,逐渐被应用到超声止血、软组织切割技术,后又被广泛应用于腔镜以及开腹手术中, 替代部分传统手术器械包括电刀等,完成软组织的切割止血。相较于传统手术器械, 超声手术刀具有切割凝闭一体化、切割时间短、热损伤小、手术烟雾少等优势[10]。近些年,专家学者在超声手术刀领域的研究,重点包括以下两方面。
(1)研发更加灵活、高效的超声刀,解决目前使用的超声波手术刀存在的灵活性不足、结构笨重等问题。国内外研究学者们在对超声刀微型化上的研究集中在对换能器和刀头部分进行微型化的改进和创新上。例如,Li 等[11]设计了一款夹心式微型超声刀换能器,较小的体积使其可放置于其配套设计的蛇形关节,实现超声刀的高自由度操作。然而,小型化在提供切割硬组织和软组织所需的超声波振动能量方面带来了挑战,部分原因是伴随的小体积压电材料[12]。Martin 等[13]设计了一种钛基平面超声微手术刀,研究的主要目标是开发一种更小、更轻、更具成本效益的超声波手术刀,可以用作当前手术器械的替代或补充设备。硅基平面超声换能器的概念已经得到证实,但由于材料失效,其尚不适合临床使用。
(2)优化改进超声刀的各项工作性能。对超声刀性能改进方面的研究,主要分为3 类:① 对超声刀的材质、形态等进行改进,提升超声刀的使用效果;② 对超声刀进行无线化改进,避免接线过多引起手术操作过程中可能出现的混乱情况;③ 引入深度学习与神经网络的研究,提高有线超声手术器械的振动幅值和频率控制的精度。
Li 等[14]提出了一种具有多级放大方案的新型超声手术刀杆,该方案由超声振动的功能缩小和增益结构组成。在超声波传输过程中,振动幅度首先沿超声波手术刀杆受到抑制,以减少摩擦能量损失,之后在远端放大并进行组织切割。为了进一步提高切割能力,超声波手术刀的远端刀片结构已改进为矩形。Li 等[15]和郭志成[16]还提出了一种基于纵向——扭转振动模式的超声手术刀以增强止血能力,实现对3 mm 以上大血管的安全切割,研究主要是对超声手术刀的集中器进行了特别设计,即采用螺旋槽设计,实现了这种振动方式。为了兼顾阶梯型变幅杆的放大系数以及曲线过渡变幅杆突变截面处的高疲劳强度,韩道成等[17]提出了一种最速曲线的过渡结构的复合变幅杆,基于该结构设计了一种超声刀换能器,并利用有限元法和实验法分别对该换能器频率修正特性和动力学特性进行了验证。
Kim 等[18]研究出带有电池模块的无线超声手术系统(Wireless Ultrasound Surgical System,WUSS),在外科手术过程中具有高效的功耗和适当的切割效果,该研究采用压电材料和重新极化工艺的定制超声波换能器(Ultrasonic transducer,UT),用于提高WUSS 的电池功耗和输出幅值性能。UT 重新极化后,品质因数提高,减少了不必要的热量产生。由于具有压电材料和重新极化工艺的UT 的发展,改善的WUSS 性能有利于增强手术过程中的止血性能和缩短解剖时间。
有研究探讨了换能器的激励频率和谐振频率不能保持同步,输出幅值减小,振动不稳定的问题[19],并提出了基于径向基神经网络和Q-Learning 强化学习的超声刀换能器模型,使换能器的振动幅值提高了15.25 μm,振幅波动在0.92 μm 处稳定。Kim 等[20]开发了一款提高有线超声手术器械的振动幅值和频率控制精度的有线超声手术器械。使用开发的装配夹具工艺在手持式仪器中实现了带有波导的螺栓夹式朗格文超声换能器(Bolt Clamp Type Langevin Ultrasonic Transducer,BLUT),该工艺具有阻抗和网络分析仪,可使用数字扭矩扳手精确控制压缩力。BLUT 的频率会对切口、血管和组织产生影响,所以采用机械品质因数和机电耦合系数高的由PMN-PZT 单晶材料制造的螺栓夹式朗格文超声换能器(BLUT),可确保BLUT 以准确的频率振动,使有线超声手术器械具有高性能。有研究发现,在实验室中,使用传统的方法来测量换能器的谐振频率较为低效和昂贵[21]。将换能器谐振频率的特征变量通过等效电路法进行分析,基于输入输出映射函数的反向传播(Back Propagation,BP)神经网络,建立特征变量与谐振频率之间的非线性关系模型,之后,采用粒子群算法优化BP 的初始权值和阈值神经网络得到最佳参数组合,从而提高BP 神经的输出精度网络,实验数据表明,该方法可以有效测量换能器的谐振频率PSO-BP 神经网络,测量误差为1 Hz。与传统测量方法相比,该方法具有成本低、效率高、响应速度快等优点。
3 柔性超声刀分类及概述
微创手术有助于降低发病率、加快术后恢复和降低成本,是手术设备创新的主要焦点。超声手术器械在手术过程中具有精度高、组织选择性高等优点。而柔性关节微创超声手术器械最大的优点是自由度和灵活度比传统人工操作的微创超声手术器械高得多,可达到比传统微创手术器械更好的效果[22]。一般搭建变曲率柔性关节的新方法是采用柔性元件和刚性基杆,同时保留柔性元件内部中空通道,形成刚柔体同轴嵌联结构,实现微创手术器械的变曲率机理。目前已提出多种基于变曲率柔性关节的新型微创超声手术刀,以适应狭窄的工作空间,该柔性超声刀可以根据需求调整柔性关节的曲率,更好地服务医生与患者[23]。可弯曲的柔性超声手术刀由于具有更高灵活度与自由度,带来了新的微创手术方式的可能性,如单孔腹腔镜微创手术和经自然腔道内镜手术[24-27]。
根据换能器所处位置划分,本文将柔性超声手术刀分为两大类:一类是换能器位于手柄端的超声刀,另一类是换能器位于执行末端的超声刀。结构分类与专利示例如表1 所示。
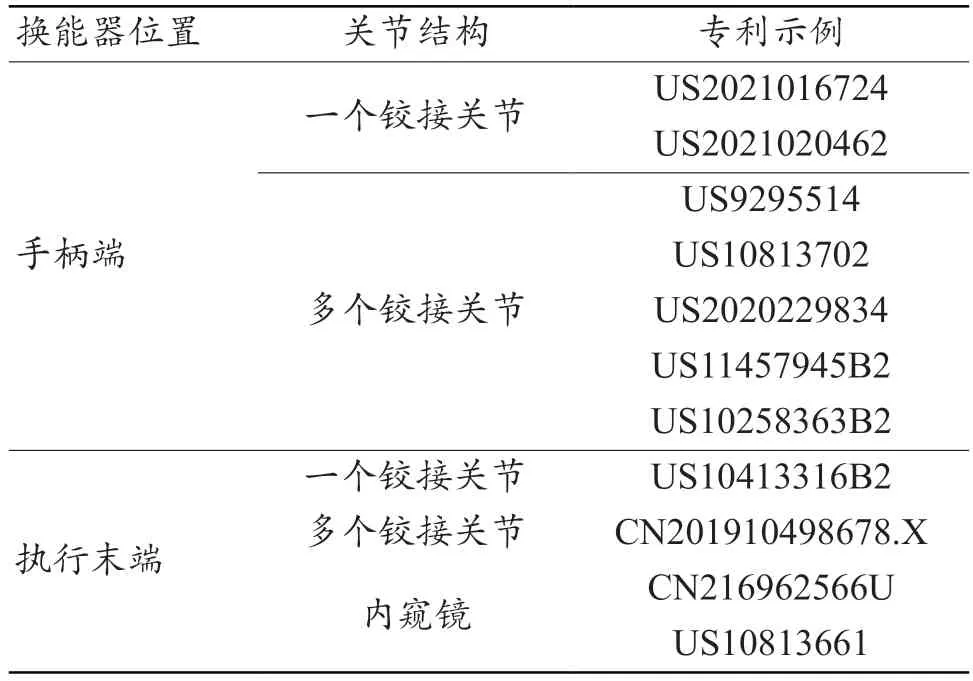
表1 微创外科多自由度柔性超声刀的结构分类
(1)换能器在手柄端的柔性超声刀。为解决刚性超声手术刀的自由度局限,一些机构及公司提出了在换能器和执行末端之间接入柔性结构的想法。伊西康(强生旗下)内外科公司和科维蒂恩有限合伙公司发布了多篇关于换能器在手柄端的多自由度外科能量器械的专利[28-30]。专利设计多为内部是一个厚度窄的细长体,外部是带有多段关节以铰接式方式连接起来的关节管腔组成的柔性细长壳体,末端执行器在远端细长的壳体末端部分。这种柔性波导棒通过细长壳体腔体,使柔性波导的近端部连接到超声换能器,远端部分与柔性端执行器连接,柔性波导的铰接部分比其他部分的厚度更窄。这种结构的超声刀的运动可以包括末端执行器围绕轴的旋转运动,末端执行器相对于轴的偏转运动,以及末端执行器的运动,如关闭或切割,实现一定程度上的灵活操作。但是这种结构存在一定问题:① 不能提供足够大的自由度,超声刀使用时在灵活度方面受到了很大限制;② 在传导超声波时,超声波并不能很好地穿过弯曲的轴。科维蒂恩有限合伙公司还设计了另外一种结构,即在执行末端和波导棒之间接入圆滑元件,这种圆滑元件为球体或圆弧形结构,可以实现多个角度的偏转和刀头开合的运动,该设计改进了管腔关节自由度不够的缺陷。
(2)换能器在执行末端的柔性超声刀。由于换能器产生的超声波不能很好地穿过弯曲的轴,所以需要对超声刀的结构进行优化,一些研究人员提出了将换能器微型化置于执行末端的想法。例如,khalaji 等[31]提出在换能器和波导杆之间接入平行四边形结构的想法,这样设计的超声刀具有两个自由度,一个自由度是60°的左右俯仰,一个自由度是刀头的开合。科维蒂恩有限合伙公司发布了一种铰接超声手术末端执行器的专利[32],该设计的结构包括劈叉、耦合于刀头的换能器壳体,设置在换能器壳体内的超声换能器,从该超声换能器远端伸出的波导,设置在波导远端的超声刀头,从该换能器壳体远端伸出的轴。超声波换能器产生的超声波能量沿波导传输至超声波叶片,用于对组织进行治疗。这一设计可以实现执行末端绕其与波导棒连接点的旋转与刀头运动,具有较高的自由度。
世格赛思医疗科技有限公司[33]和Boston Scientific Scimed(博为医疗公司)[34]发布了将微型化的换能器与刀头耦合组成执行末端接入到内窥镜的专利。该设计的主要结构由柔性轴、弯曲装置和末端执行器组成,末端执行器由换能器和刀头构成,弯曲装置的远端与末端执行器的近端相连接,柔性轴的远端与弯曲转置的近端相连接,柔性轴的近端与手柄相连接。这种设计方案的优势在于:① 可以通过弯曲控制组件转动末端执行器,增强其灵活性和自由度;② 柔性轴(内窥镜组件)是可拆卸的设计方式,方便进行消毒和重复使用。
4 总结与展望
多自由度软组织超声刀是一种新型的医疗设备,可实现高精度的软组织切割和凝固。其工作原理是利用高频超声波在软组织中产生热效应,达到切割和凝固的目的。与传统的手术刀和电切器相比,多自由度软组织超声刀具有切割精度高、创伤小、出血少、恢复快等优点。多自由度软组织超声刀的关键技术是实现多自由度运动控制和高精度超声波发射。为了实现多自由度运动控制,需要采用高精度的运动控制系统和传感器,实时监测刀头的位置和姿态,并通过反馈控制实现精确的运动控制。同时,为了实现高精度超声波发射,需要采用高频超声波发射器和控制电路,实现精确的能量控制和波形控制,以达到最优的切割和凝固效果。综上,多自由度软组织超声刀的主要优点包括:① 高精度,通过实时成像和控制系统,可以实现对组织的精确切割和定位;② 低创伤,相对于传统手术刀,超声刀可以减少手术创伤和出血量,缩短恢复时间;③ 高安全性,超声刀可以避免对周围组织产生损伤和烧伤,减少手术风险;④ 多功能,超声刀可以实现多种功能,包括切割、凝固、切除等,适用于多种手术需求。但多自由度软组织超声刀的发展还面临一些限制,主要包括:① 技术难度高,超声刀的设计和制造需要高精度的机械和电子技术,制造成本较高;② 应用场景有限,多自由度柔性超声刀主要适用于软组织手术,对于硬组织和骨骼结构的手术则有一定限制;③ 可靠性问题,超声刀的使用需要严格的操作规范和维护,一旦出现故障或失控,可能会对手术带来不良影响。
多自由度软组织超声刀的研究还面临一些挑战,包括刀头设计、材料选择、热效应控制等。未来的研究方向包括进一步提高切割和凝固效果、扩大应用范围、降低成本等。随着技术的不断发展和完善,多自由度软组织超声刀有望在以下方面得到进一步应用和改进:① 通过改进控制系统、优化超声波技术等手段,提高超声刀的精度和可靠性;② 通过创新设计和材料选择,拓展超声刀的应用场景,适用于更多类型的手术。
综上所述,多自由度软组织超声刀是一种具有广阔应用前景的医疗设备,未来有望在手术中发挥更重要的作用。
