基于无人机多光谱遥感的农业园区地物分类研究
2024-01-22宋恩泽邵光成朱雪颖
宋恩泽, 张 颖, 邵光成, 刘 杰, 王 羿, 朱雪颖
(1.河海大学农业科学与工程学院,江苏 南京 210098; 2.南京市江宁区水务局,江苏 南京 211100; 3.天津市灌溉排水中心,天津 300074; 4.西安理工大学水利水电学院,陕西 西安 710048)
随着乡村振兴战略的提出,农业产业园得到了快速的发展。农业产业园在农业技术推广、种植结构调整、项目孵化和企业孵化、农业知识谱及等方面具有重要的引领和示范功能[1]。通常情况下,农业产业园区面积较小,但土地利用类型多样,地形结构复杂,采用传统的实地走访测量会浪费大量的人力、物力资源[2]。快捷准确的农业园区土地利用类型调查对园区合理的种植规划、复杂地物的分类监测具有重要作用。
遥感技术是通过卫星等飞行器收集地物目标的光谱信息,对地物进行判断识别的技术。其中,卫星遥感技术以人造卫星为平台,因其覆盖面大,探测周期短,可在大范围内进行地物分类及监测,但是相对于航空遥感摄影,其分辨率相对较低。同时,中高分辨率的卫星遥感影像受天气和云量影响明显,在大比例尺制图方面应用有限[3-4]。无人机遥感具有作业灵活、实时性强、成本低及分辨率高等特点,在土地利用调查中得到越来越多的应用[5]。早期的无人机通常搭载RGB成像相机,得到的RGB影像仅含红(R)、绿(G)、蓝(B)等可见光波段,这些波段对部分地物的敏感性较低,且构建的植被指数类型较少,算法的适用性较差,只能通过目视解译的方法进行地物分类[6]。近年来随着多光谱和高光谱相机的应用,无人机得到的遥感波段信息更为丰富,为利用ENVI等专业软件进行自动化地物识别提供了可能[7]。
目前,利用无人机高光谱及多光谱影像进行地物分类的方法主要有传统的监督分类及非监督分类[8]、面向对象影像分类[9]、机器学习分类[10]及深度学习分类[11]等。Bryson等[12]基于无人机可见光影像,将地物纹理颜色作为分类特征用于大规模地形分类;杨蜀秦等[13]基于无人机多光谱影像,采用深度语义分割算法对Deeplab V3+进行优化并用于大田作物分类,比支持向量机法的分类精度提高了17.75%;杨红艳等[14]基于无人机遥感和随机森林法对荒漠草原的植被进行分类,总体分类精度达到了91.06%,取得了较为优良的效果;Lou等[15]基于面向对象的随机森林算法对沼泽植被进行分类,总体分类精度可达70.26%以上。目前,将无人机遥感技术应用于中小型农业园区的地物分类尚不多见,且对分类后图像的精度优化研究鲜有报道。
鉴于此,本试验以河海大学农业科学与工程学院节水园为研究对象,利用无人机采集研究地块多光谱遥感图像,将遥感图像经过主成分分析增强各波段光谱信息;在样方调查的基础上,分别利用支持向量机模型(SVM)、人工神经网络模型(ANN)、随机森林模型(RF)等算法进行地物分类,筛选最佳分类方法;进一步对影响分类精度的复杂地块做裁剪处理,并使用TensorFlow算法对最优分类结果进行深度学习,优化分类效果。
1 材料与方法
1.1 研究区概况
河海大学农业科学与工程学院节水园(118°47′E,31°54′N)位于江苏省南京市江宁区,占地面积19 300 m2,海拔12 m。园区地处亚热带季风气候区,四季分明,气候温和,无霜期长,光照充足。园区内主要地物类别包括林/草地、耕地、水体、道路及房屋等,研究区地理位置及地物影像图如图1A所示。
1.2 数据获取
无人机多光谱影像采集时间为2022年4月21日中午11:00-13:00,天气状况良好,晴朗无风,能见度好。采用大疆精灵4无人机(深圳市大疆创新科技有限公司产品)搭载P4 Multispectral多光谱相机(深圳市前海雅棋科技有限公司产品)。无人机沿着规划布置的11条主航线采集多光谱数据,航线长度为1 671 m,飞行高度50 m,飞行速度5 m/s,航向重叠率及旁向重叠率分别设置为80%、 70%,主航线角度177°。
1.3 数据处理
将无人机采集的图像按照蓝光、绿光、红光、红边及近红外波段图像分别导入Agisoft Metashape Professional软件,依次进行密集点云、网格和纹理处理,进行图像拼接,并生成正射影像及DEM(数字高程模型)影像。将获得的正射影像导出至ArcMap10.5,以蓝光正射影像为基准,通过地理配准功能对另外4幅正射影像进行图像配准。在ENVI Classic 5.5.3软件中使用layer stacking功能将5个波段的正射影像进行波段合成,由于无人机飞行高度较低,可不进行大气校正[16],直接使用Quick Atmospheric Correction功能进行快速辐射校正,再通过裁剪处理,得到待分类图像。

A:原始影像;B:主成分分析后的影像。图1 研究区地物原始影像及主成分分析后影像Fig.1 Original and post principal component analysis images of features in the study area
1.4 研究方法
1.4.1 分类标准 根据试验区地物实地调查,结合中国土地利用现状图[17],将研究区地物分为农村道路、空闲地、林/草地、裸土地、沟渠、设施农用地、坑塘水面、塑料实验器材、建筑垃圾、农村宅基地、工业仓储用地和阴影,具体分类标准如表1。在实地调查的基础上选取了1 185个训练样本,390个验证样本。
表1 地物类型及影像特征
1.4.2 数据优化 由于分类地物较为复杂,因此需对多波段图像进行图像增强处理。主成分分析(PCA)是一种广泛使用的图像增强与数据降维算法,它将n维特征映射到k维上,在原有的n维特征基础上重新构造出全新的正交特征。利用PCA可对多波段图像进行降维,提高目标研究区内地物的植被指数、纹理特征和反射率[18],主成分分析后研究区影像如图1B所示。
1.4.3 植被指数获取 归一化植被指数(NDVI)在植被生长状态和植被覆盖度研究中展现出良好的效果[19],本研究中将NDVI作为指标用于植被提取。
(1)
其中,ρNIR为近红外波段反射值;ρR为红光波段反射值。
1.4.4 分类模型选择 随机森林(RF)是一种基于学习理论的组合分类智能算法[20]。RF利用Bootstrap重抽样方法从原始数据中抽取若干样本,构建全体Bootstrap样本的决策树,并对所有决策树的预测结果进行组合,并投票选出最终结果[21]。在对图像进行分类的过程中,每一个决策树分别对像元进行分类,而像元最终的类别由决策树投票决定。因此,RF分类器能够克服传统分类器对多光谱数据进行分类时存在的数据量大、训练样本少且计算速度慢的问题[22]。同时RF处理多维数据时不会出现过拟合现象[23]。
人工神经网络(ANN)是由大量简单的处理单元连接成的复杂网络,通过模仿人脑对数据进行识别、接受、处理及传输,是以模拟人类神经系统的结构和功能为基础而建立的一种信息处理系统[24]。各单元之间的作用函数如式(2)、式(3)。
(2)
(3)
其中,yj为神经元j的输入;xi为上一层第i神经元值;wij为权系数;θi为阈值;f为非线性激励函数[25]。
支持向量机(SVM)[26]是目前被广泛使用的一种监督分类器,建立在统计学理论和结构风险最小原理基础上,可解决样本量少的缺陷,实现高纬度模式识别[27]。
1.4.5 模型优化 TensorFlow是一个将复杂的数据结构体传递输入至人工智能神经网络中并进行分析和处理的新一代人工智能学习系统。TensorFlow包含了两层含义: Tensor代表N维数组,Flow表示基于数据流图的计算。TensorFlow表示数据流图中数组在两端点之间流动的计算过程,在语音及图像识别等机器学习与深度学习领域应用较广[28]。自2015年首次发布以来,被广泛用于改善机器学习中,但其在地物遥感分类方面的应用较少。
1.4.6 评价指标 对于不同分类模型输出的结果,构建验证样本的混淆矩阵,并进行下列指标的计算,进而进行算法的比较。
总体分类精度(Overall accuracy):正确分类的地物像元与试验区总像元之比。
用户精度(User accuracy):正确分类到i类的像元总数与分类器将整个影像的像元分为i类的像元总数比率。
Kappa系数[29](Kappa coefficient):通过将真实像元总数(N)乘以混淆矩阵的对角线之和,减去某个地物真实像元总数和该类中被分类像元的乘积,再除以总像元数的平方减去某一类地物真实像元与该类中被分类像元总数之积求和。
生产者精度(Producer accuracy):整个影像的像元正确分为i类的像元数与该类实际像元总数的比率。
1.5 技术路线图
本研究采用的技术路线如图2所示。
2 结果与分析
2.1 分类结果分析
利用SVM、RF、ANN模型对主成分变换后影像及SVM模型对未经过主成分变换的原始影像进行分类,结果如图3所示。从图3中可以看出,大部分情况下分类结果一致,局部地区存在一些差异,将3种分类模型各自分类结果与试验区RGB图像目视比较,SVM、RF、ANN分类模型对植被及非植被地物的分类匹配度较高。树木植被环绕试验区四周分布,农田植被与裸土地边界较为清晰,对于种植作物的设施农用地,识别度也较高;对于工业仓储用地、农村道路、坑塘水面等地物,3种分类模型均能较为准确的分类。在分类其他地物时,3种分类模型差距较大。RF、ANN分类模型将工业仓储用地附近空闲地错分为裸土地; ANN分类模型在分类建筑垃圾时,常错分为工业仓储用地,分类效果不如SVM、RF分类模型。综上所述,3种分类模型对林/草地、工业仓储用地、农村道路等反射率及形状与周边差距较大的地物分类效果较好,RF分类模型对坑塘水面的分类效果较好。从整体来说,SVM分类模型对农业园区地物的分类效果最好。
2.2 不同分类模型定量分类结果
根据不同分类模型得到的分类结果混淆矩阵(图4),可得出不同分类模型的总体分类精度、用户精度、Kappa系数及生产者精度,如表2和表3所示。

PCA降维:主成分分析降维;SVM分类模型:支持向量机分类模型;RF分类模型:随机森林分类模型;ANN分类模型:人工神经网络分类模型。图2 技术路线图Fig.2 Technical flow chart
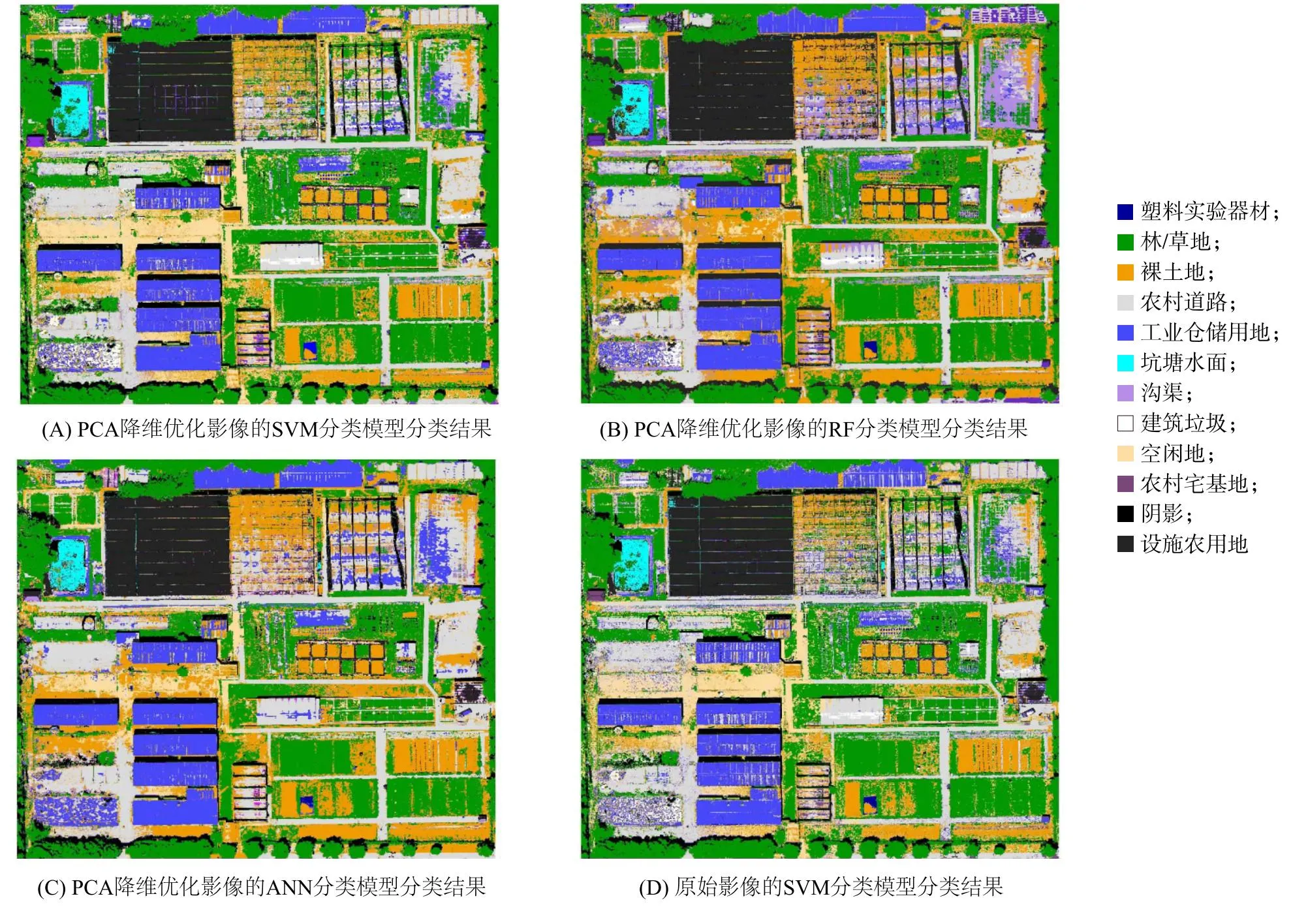
PCA降维、SVM分类模型、RF分类模型、ANN分类模型见图2注。图3 分类结果Fig.3 Classification results

a:空闲地;b:实验器材;c:设施农用地;d:阴影;e:农村宅基地;f:建筑垃圾;g:沟渠;h:坑塘水面;i:工业仓储用地;j:农村道路;k:裸土地;l:林/草地。SVM:支持向量机分类模型;RF:随机森林分类模型;ANN:人工神经网络分类模型。图4 不同分类模型分类结果的混淆矩阵图Fig.4 Confusion matrix of classification results of different classification models

表2 不同分类模型的分类精度

表3 不同分类模型分类的总体精度和Kappa系数
SVM分类模型对PCA降维前后的影像总体分类精度及Kappa系数分别为95.1%、97.40%和0.75、0.96。从PCA使用前后精度来看,主成分分析技术的应用使总体分类精度和Kappa系数分别提高了2.30个百分点、0.21;从生产者精度来看,SVM分类模型对林/草地、坑塘水面、农村道路、阴影、设施农用地和建筑垃圾的分类效果最好,均超过99%;其次对于工业仓储用地、裸土地、沟渠和空闲地的分类精度也达到了90%以上;但是对农村宅基地和塑料实验器材存在一定错分现象。可能原因是因为塑料器材多存于裸土地及植被丛中,表面被泥土覆盖或植被遮挡,使其部分像元分类为林/草地和裸土地。农村宅基地组成多为表面刷漆石板结构,在颜色上与工业仓储用地极为相似,漆块脱落后石板易被误分为农村道路。
RF分类模型总体分类精度及Kappa系数分别为95.95%、0.95。从生产者精度来看,林/草地、裸土地、农村道路、工业仓储用地、坑塘水面、农村宅基地、阴影和设施农用地的分类精度较高,均能达到90%以上;但是,RF分类模型对沟渠和塑料实验器材有部分错分现象。沟渠由石料堆砌而成,其表面与工业仓储用地和农村道路有一定相似性,从而导致实际沟渠被错分为工业仓储用地或农村道路。
ANN分类模型总体分类精度和Kappa系数为87.17%及0.84,低于SVM、RF分类模型。但其对林/草地、裸土地、农村道路、工业仓储用地、坑塘水面、阴影和设施农用地等仍有较高的分类精度;对于建筑垃圾错分误差为100%,对农村宅基地、沟渠和塑料实验器材分类精度也较低。分析其原因是神经网络模型相比于其他模型,需要更多的训练样本及数据,建筑垃圾、农村宅基地和塑料实验器材在试验区数据较少,无法做出较为准确的分类。
2.3 TensorFlow优化
从3个分类模型整体分类情况来看,SVM、RF、ANN分类模型的总体分类精度分别为97.40%、95.95%、87.17%,均超过80%,Kappa系数为分别为0.96、0.95、0.84,表现出较高的适用性。其中,SVM分类模型的表现最优,即SVM为最佳分类模型,因此,将SVM分类模型作为最优分类模型进行TensorFlow深度学习,进一步优化分类模型。
对试验场地原始伪彩色图像和SVM分类模型分类后图像比较得出,试验区设施农用地右侧为透明薄膜棚区,由于无人机多光谱图像分辨率较高,棚内裸土地和林/草地等由于薄膜遮盖,部分地物被错分为农村道路、工业仓储用地等,将其进行深度学习训练,会影响整个试验区地物分类,不利于精细分类,如图3A。因此,考虑将试验区图像裁剪为a、b两区分别进行分类,裁剪结果如图5。
对a、b两区分别使用SVM分类模型分类后进行深度学习优化,得到分类结果如图6。
经TensorFlow深度学习优化后的分类精度和混淆矩阵如表4及图7所示。a、b两区的分类精度分别为97.54%和99.12%,总体分类精度和Kappa系数分别为98.36%和0.98。与原始SVM分类结果相比,分区后的分类精度均有较大提高,但仍有部分农村宅基地被错分为农村道路,其原因在于园区内农村宅基地大多较矮小且与农村道路材料组成相同,容易产生错分现象。总体来看,TensorFlow优化能融合SVM分类模型与神经网络分类模型的优点,对样本较少的地物也能保持极高的分类精度。
3 讨论与结论
本研究将无人机多光谱影像应用于农业园区地物分类中,利用植被信息及光谱信息构建模型,对比分析SVM、RF、ANN分类模型,筛选出了适用于中小型农业园区地物分类的SVM分类模型。同时,利用筛选出的模型通过TensorFlow训练深度学习样本,提升了局部地区分类精度。研究结果对农业园区地物分类有一定的参考价值。
筛选最优分类方法过程中,SVM分类模型总体分类精度最高,达到了97.40%;其次是RF分类模型,总体分类精度为95.95%,但ANN分类模型仅为87.17%。综合对比,SVM分类模型作为一种二分类模型,能够很好地解决训练样本较少的地物分类[30]。本研究区占地面积1.93 hm2,部分地物如塑料实验器材等样本较少,而ANN分类模型虽然作为较智能的模型,但其需要大量的训练样本进行学习,对于训练样本较少的地物容易产生错分及漏分现象。同时,ANN分类模型分类时存在隐藏层,使其分类过程中需要更多的计算量[31],运算时间超过SVM分类模型及RF分类模型,在地物分类中适用性比SVM分类模型和RF分类模型低。

图5 研究区裁剪图Fig.5 Cutting map of the study area

图6 裁剪分区图的TensorFlow优化分类结果Fig.6 The TensorFlow optimized classification resutls of the cutting maps

表4 SVM分类模型分类结果经TensorFlow深度学习优化后的分类精度

a:空闲地;b:实验器材;c:设施农用地;d:阴影;e:农村宅基地;f:建筑垃圾;g:沟渠;h:坑塘水面;i:工业仓储用地;j:农村道路;k:裸土地;l:林草地。图7 TensorFlow深度学习优化后SVM分类模型的分类混淆矩阵Fig.7 Classification confusion matrix of SVM classification model optimized by TensorFlow deep leaming
在使用TensorFlow对最优分类模型优化时,a、b 2个分区及完整园区总体分类精度分别为97.54%、99.12%、98.36%,与原始SVM分类模型的分类结果保持一致,但沟渠的分类结果明显优于原始分类结果,达到了98.00%,分析原因SVM分类模型作为一种传统的机器学习分类模型,通过分离超平面来完成分类[32],沟渠由于未及时除草,和林/草地混杂从而影响SVM分类模型的分类;TensorFlow训练深度学习模型通过训练原始模型在待分类图像中寻找相似特征,在SVM分类模型分类的结果上,使用深度学习算法,能够更为准确地实现沟渠分类。
图像增强处理技术能够有效提高地物分类结果,经过PCA处理的图像采用SVM分类模型的分类结果的总体分类精度及Kappa系数为97.40%、0.96,相比于应用原始图像总体分类精度和Kappa系数分别提高了2.30个百分点和0.21。
SVM、RF、ANN分类模型的总体分类精度,均超过了87%,表现出一定的适用性。考虑分类耗费时间及部分地物分类精度,SVM分类模型在样本较少的地物分类中保持较高的准确性,耗费时间短,较为稳定。
对分类好的图像,可通过TensorFlow训练深度学习优化,提高部分分类不佳的地物分类精度。经过优化后的a、b两研究区总体分类精度分别为97.54%及99.12%,整个园区总体分类精度为98.36%,均比未经TensorFlow处理的分类结果有所提高。
在复杂地物的分类中,反射率或形状相似的地物会影响彼此的分类精度,造成错分、漏分等现象,通过裁剪将地物分别进行分类能够提高整个图像总体分类精度。
