基于多媒体技术的船舶航行轨迹实时显示系统
2024-01-03段海涛
段海涛
(北京科技大学,北京 100083)
0 引 言
在海洋环境中,船舶的航行轨迹对于提高航行安全性、监测海洋环境、增强作战指挥能力等方面均具有重要的意义[1]。实时显示船舶航行轨迹的系统对于现代海军、航运业以及海洋科学研究等领域的需求变得越来越迫切。随着计算机技术的迅速发展,使用计算机图像处理和视景仿真技术来构建虚拟现实的视景模型,在军事和民用等领域有着广泛的应用前景。特别是对舰船轨迹的三维虚拟现实重构,有效地解决了武器系统研制和模拟演习中的视景仿真问题[2]。通过模拟船舶航行轨迹,能够进行多武器平台和模拟海战情况下的船舶轨迹重构。这不仅可以提高军事推演、武器研究和作战训练中的实时视觉仿真分析能力,还能够缩短武器装备的研制周期、节约军演经费等。因此,研究基于多媒体技术的船舶轨迹虚拟重构具有重要的现实意义。
1 船舶航行轨迹实时显示系统详细设计
1.1 系统功能需求分析
船舶航行轨迹实时显示系统在军事上可为海上实战呈现虚拟场景,为制定和执行海战计划提供更加直观和真实的船舶航行数据[3],因此可使用多媒体技术以建立三维实例模型的方式为用户提供三维场景展示功能。船舶在海上航行时,地面站以及船舶自身都需要及时掌握其航行轨迹,因此船舶航行轨迹实时显示系统需要具有信息同步的功能。为充分呈现船舶航行轨迹可视化画面,该系统需要连接不同类型的数据库以及软件硬件的驱动脚本[4],其也需要具有实体驱动的功能。同时支持用户对船舶航行轨迹信息进行调取、查询等,其也需要具备较好的交互功能。
1.2 基于FPGA 的船舶导航雷达回波采集模块设计
在航行过程中,船舶依据导航雷达的导航进行航行,因此通过采集船舶导航雷达回波得到船舶航行的轨迹数据。以可编程逻辑控制器(FPGA)为基础,设计船舶导航雷达回波采集模块,其结构如图1 所示。
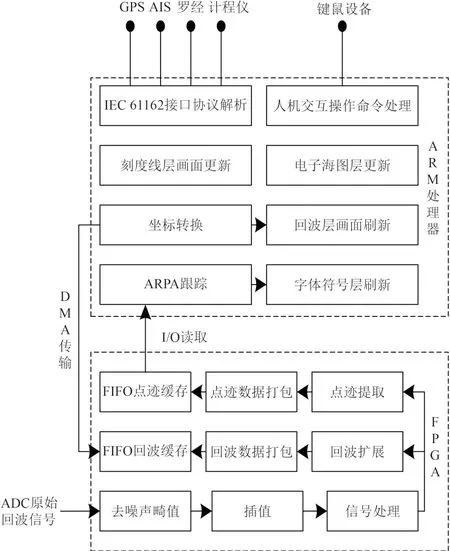
图1 船舶导航雷达回波采集模块结构Fig. 1 Structure of ship navigation radar echo acquisition module
利用FPGA 连接ARM 处理器,将ADC 原始回波信号输入到FPAG 内后,经过去噪声、差值和信号处理后,分别对吹后的ADC 原始回波信号进行回波扩展、点迹提取、数据以及缓存处理后,利用DMA 传输方式将FIFO 回波缓存数据发送到ARM 处理器内的坐标转换单元内,利用I/O 读取方式将FIFO 点迹缓存数据发送到ARPA 跟踪单元内,依据坐标转换和ARPA 跟踪结果对回波层画面和字体符号层进行刷新,再对刻度线层画面和电子海图层进行更新后,通过IEC61162 接口协议解析和人机交互操作命令处理实现人机交互,通过GPS、AIS 等展示船舶导航雷达回波数据。
1.3 基于卡尔曼滤波的航迹获取
利用船舶导航雷达回波采集模块采集到船舶导航雷达回波数据后,利用卡尔曼滤波对雷达回波数据进行处理后,提取到船舶实际航行的航迹。卡尔曼滤波算法可在测量的信号内使用递归估计的方式获得动态目标的当前实际状态[5],在目标跟踪、导航、通信等多个领域广泛应用。
由于船舶导航雷达射频收发单元更新周期为36 r/min,导航雷达更新目标位置的间隔为2 s,故将卡尔曼滤波位置更新周期设置为0.2 s。Yk表示船舶航迹状态矩阵,则导航雷达对船舶航迹定位的动态模型可表示为:
式中:k表示时刻,当k=0 时,则表示初始时刻;Fk-1、Qk-1分别表示船舶状态转移矩阵和过程噪声矩阵。
Uk表示船舶航迹回波信号的量测矢量,其计算公式如下:
式中:H、Vk分别表示船舶航迹回波信号的量测矩阵和量测误差矢量。
以式(1)和式(2)结果为基础,建立卡尔曼滤波器并初始化:
式中:Y0表示初始船舶航迹状态信息;分别表示初始卡尔曼滤波估计的状态矩阵和协方差矩阵;E表示状态矩阵协方差。
对2 s 后的船舶航迹位置进行估计,公式如下:
通过计算预测协方差矩阵、更新协方差矩阵和更新滤波增益矩阵后,可得到船舶2 s 后航迹真实状态。
将式(6)结果按照时序排列后,即可得到船舶航行轨迹。
1.4 基于多媒体技术的船舶航行虚拟环境建立
利用计算机对图形、文字、数据等进行综合处理等技术被称为多媒体技术,该技术可为用户提供数据实时交互能力[6],在图形、文字和数据处理等多媒体技术中,3Dmax 技术属于一种建模技术,其可建立目标的虚拟模型、环境等为用户提供一种仿真场景。在此使用多媒体技术中的3Dmax 技术建立船舶模型和航行环境模型,再将船舶航行轨迹导入到该模型内,即可得到船舶航行轨迹可视化画面。使用3Dmax 技术建立船舶模型和航行环境模型步骤如下:
步骤1将船舶和航行环境轮廓CAD 矢量数据导入到3Dmax 内,将矢量数据转换成可编辑的多边形数据后,清除其坐标后得到船舶和其航行环境模型。
步骤2对船舶和其航行环境模型进行优化处理,在3Dmax 软件内,对船舶和其航行环境模型变形、交叠区域进行调整。
步骤3以船舶和其航行环境实景图像为基础,对船舶和其航行环境模型进行纹理贴图处理[7],将实景图像像素数值设置为2N,将贴图长宽设置为1∶2 后,使用UVW 贴图工具将纹理贴在船舶和其航行环境模型上[8],再将船舶航行轨迹输入导入到该模型内,即可得到逼真的船舶航行轨迹可视化画面。
1.5 实时显示模块设计
得到船舶航行轨迹可视化画面后,利用实时显示模型为用户呈现该画面,设计实时显示模块结构如图2所示。在系统实时显示模块内,用户通过用户端连接通信板卡与CPU 内的通信程序进行交互,CPU 通过驱动程序驱动HMI 显示屏显示船舶航行轨迹。

图2 实时显示模块结构Fig. 2 Real time display module structure
2 实验结果分析
以某远洋船舶作为实验对象,该船可搭载原油和散货,吃水约14 m,船长约230 m,宽约为度为4 m。使用本文系统对该船航行轨迹进行可视化显示,验证本文系统的实际应用效果。
采集船舶的雷达回波信号是获取船舶航行轨迹的基础,利用本文系统采集该船舶某时刻的雷达回波信号,采集结果如图3 所示,可以清晰地获取以该船舶为中心的雷达回波信号。雷达回波信号可以提供有关船舶周围环境的重要信息,这些信息对于后续船舶航行轨迹的可视化非常重要。雷达回波信号包含了有关船舶距离、速度、角度、形状等重要信息。通过处理和分析这些信号,可以提取出有关周围环境的数据,为后续船舶轨迹可视化提供数据基础。

图3 船舶雷达回波信号采集结果Fig. 3 Acquisition results of ship radar echo signal
以该船舶某段时间航行雷达回波信号作为实验对象,使用本文系统获取该段雷达回波信号对应的船舶航行轨迹,提取结果如表1 所示。分析可知,利用本文系统可有效获得该船舶航行时的经度和纬度,说明本文系统具备较强的获得船舶航行轨迹能力。

表1 船舶航迹获取结果Tab. 1 Obtaining results of ship track
建立船舶模型与其航行环境模型是显示其航行轨迹的必要途径,验证本文系统建立该船舶航行模型和航行环境模型效果,建立该船舶和其航行环境模型,结果如图4 所示。分析可知,利用本文系统可建立船舶与其航行环境模型,其整体呈现的画面清晰,层次分明,船舶线条流畅,水体与天空较为逼真,说明本文系统不仅具备较好的船舶和航行环境建模能力,其实时显示的视觉效果较好。

图4 船舶与航行环境可视化展示Fig. 4 Visual display of ships and navigation environment
利用本文系统实时展示该船舶航行轨迹,展示画面如图5 所示。分析可知,利用本文系统可为用户呈现船舶从起点到船舶当前位置的航行轨迹,说明本文系统具备较好的应用性,可在该领域广泛应用。
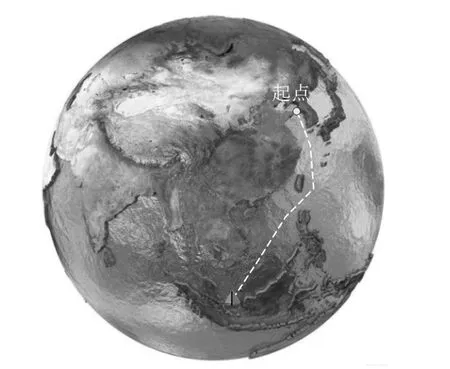
图5 船舶航行轨迹实时展示画面Fig. 5 Real time display screen of ship navigation trajectory
3 结 语
基于多媒体技术的船舶航行轨迹实时显示是一项重要的技术应用,通过研究船舶航行轨迹,为船舶在军事和民用领域良好地运用提供数据分析基础。总体来说,基于多媒体技术的船舶航行轨迹实时显示在多个领域具有广泛的应用前景,随着技术的不断发展,未来会有更多创新和突破。
