基于混合蚁群算法的无人船航行路径自主规划
2024-01-03陈宇文
陈宇文,徐 照
(1. 南京工业大学 土木工程学院,江苏 南京 210000;2. 东南大学 土木工程学院,江苏 南京 210000)
0 引 言
无人船能在人力不可为的条件下实现水面和水下目标侦察与监视等任务[1],是当前水面智能体的典型代表,受到各界普遍关注。在复杂工作环境下,航行路径规划是无人船正常工作的基础与保障[2]。
王立鹏等[3]在研究舰船路径规划问题过程中,以海图为基础,确定航线与陆地物标的对应关系,采用遗传算法对规划路径进行寻优,获取最优规划路径。该方法在目标工作环境较为复杂的条件下,规划结果精度无法保障。周怡等[4]在研究舰船路径规划问题过程中,以防碰撞为目的构建航行路径规划模型,采用优化后的DDPG 算法求解模型获取最优路径。该方法在实际应用过程中无法保障收敛速度与寻优性能的平衡性。
针对上述问题,提出基于混合蚁群算法的无人船航行路径自主规划方法,获取最优航行路径。
1 无人船航行路径的自主规划
1.1 环境建模
无人船航行路径自主规划之前,需先构建无人船工作环境模型,由此能在无人船工作环境中明确哪些区域是安全区域,哪些区域为障碍物区域。设定无人船工作环境中的障碍物均处于静止状态,由于栅格法描述简单,易于实现,因此通过栅格法构建工作环境模型[5],以A 和B 分别表示安全区域与障碍物区域。以方形地图表示无人船工作环境,栅格法中包含若干个边长为1 的小正方形,其中白色区域和黑色区域分别为安全区域和障碍物区域。
以方便后续对无人船工作环境信息的描述为目的,由上至下、由左至右的对栅格实施编号处理。在栅格间距确定过程中的主要依据为栅格点中心位置坐标,所以,可通过式(1)描述栅格号与无人船工作环境坐标(x,y)间的对应关系:
式中:ES和ceil 分别为小栅格的边长和向上取余函数;n和MM分别为小栅格的序号和栅格的整体行数;mod为余函数。
1.2 航行路径自主规划数学模型
构建无人船工作环境模型后,再构建无人船航行路径自主规划的数学模型。无人船航行路径自主规划问题可描述为:在任意规划空间内,符合相应约束条件g(γ)=0的基础上,依照某一航行性能评价指标J,规划确定无人船的航行路径,也就是由起始点ES至目标点EG,同时符合相应约束条件的一系列路径节点Γ={ES,E1,E2,···,En,EG}。
利用式(2)能够描述无人船航行路径自主规划数学模型:
式中:D和 φ分别为水动力系数和水密度;v和 ρ分别为无人船航行速度和横截面积; φ和H分别为无人船航行路径长度和机械效率。
约束条件如下:
1)地形与威胁约束。无人船航行过程中,为保障航行安全性,需防止与障碍物产生碰撞,因此设定无人船工作环境中,障碍物与危险区域均为不可穿越的区域[6]。若以R'f表示在无人船工作区域内不可穿越区域集合,考虑无人船自身的尺寸,同时考虑规划路径的平滑性,需对障碍物与危险区域实施膨化处理,由此保障无人船航行的安全性。以Rf=εR'f表示通过膨化处理的集合,也就是扩大障碍物与危险区域大小,依照无人船实际尺寸可确定膨化系数。以f(x,y)表示规划出的无人船航行路径,由此得到约束公式描述:
2)航程上限约束。无人船内部携带能量对于航行距离上限Lmax产生直接影响[7],因此在无人船航行路径自主规划过程中需设定相关约束条件,公式描述如下:
式中,φg和δg分别为规划路径长度与实际航行路径与规划路径的偏差。
3)转弯角度约束。无人船航行转弯过程中受自身机动性能影响[8],导致角度受到一定限制,以 ξ 和 ∂i分别表示无人船允许的最大拐角与任意拐弯角,约束条件公式描述如下:
4)路径平滑度约束。无人船航行路径越平滑,对自身的机动性要求越低。考虑无人船航行过程中需消耗大量能量,为路径的平滑性能够降低能源消耗。描述该约束条件公式为:
式中:Sk和n分别为第k 条路径累积转弯角度和路径点数量;R为无人船航行路径的最大转弯角度;r和Smax分别为路径内的转弯角度和允许的最大平滑度。
1.3 基于混合蚁群算法的模型求解
考虑蚁群算法应用过程中存在初始阶段搜索效率差、有较大概率获取局部最优结果等问题,将其与粒子群算法相结合,提出混合蚁群算法。针对式(2)无人船航行路径自主规划数学模型,采用混合蚁群算法进行求解。将由无人船航行路径解集内选取最优路径的问题描述为蚂蚁搜索食物的问题,设定无人船航行路径解集内各解以及最优解,分别为蚂蚁搜索食物过程中路经的城市和目标点。
依照无人船航行路径自主规划的实际情况,初始化混合蚁群算法参数,设定蚁群数量与最大迭代次数分别设定为200±100 次和150±50 次,信息素挥发系数与信息素增加浓度范围分别为0.5±0.2 和5.5±4.5,信息素初始浓度范围与启发因子关键度范围分别为55±45和5±2,信息素关键度范围为5±2。
计算蚂蚁个体的适应度v,其所描述的是蚂蚁种群的属性,能够描述蚂蚁的优劣水平,公式描述如下:
式中:w和zi分别为惯性权重与第i只蚂蚁的位置;c和 ε分别为蚂蚁个体学习因子和范围为[0,1]的随机数;pi和si分别为第i 只蚂蚁个体极限与速度的第d 维分量。
蚂蚁依照设定的迭代次数对无人船最优航行路径实施全局搜索,每实施一次搜索即完成一次迭代过程。蚂蚁在搜索无人船最优航行路径过程中会产生信息素,所以每次迭代过程后就需更新搜索路径中遗留的信息素τ(t+1),公式描述如下:
式中: ρ 和 ϖ分别为启发因子关键度和信息素更新系数; Δτ为与收敛次数成线性相关性的函数。
为避免目标迭代过程中陷入局部最优问题,对信息素上限值实施设定,公式描述如下:
式中,τmax和H分别表示信息素上限值与混沌变量。约束不同搜索路径上的信息素浓度,令无人船最优航行路径搜索空间内全部路经均由被选择的概率,通过式(9)更新的蚁群位置与信息素,确定当前蚁群位置是否为个体极值,若是个体极值,就需将当前位置与全局极值进行对比;若不是个体极值,则需返回上一过程再次确定。在满足迭代标准后,即可终止运算过程,输出信息浓度最高的解作为最优解,即无人船航行路径自主规划的最优路径。
2 实验结果
为验证本文方法在路径自主规划中的应用效果,选取某型号的无人船为研究对象,表1 为研究对象相关参数。设定研究对象的工作环境大小为24×20 km,采用本文方法对研究对象航行路径进行自主规划。
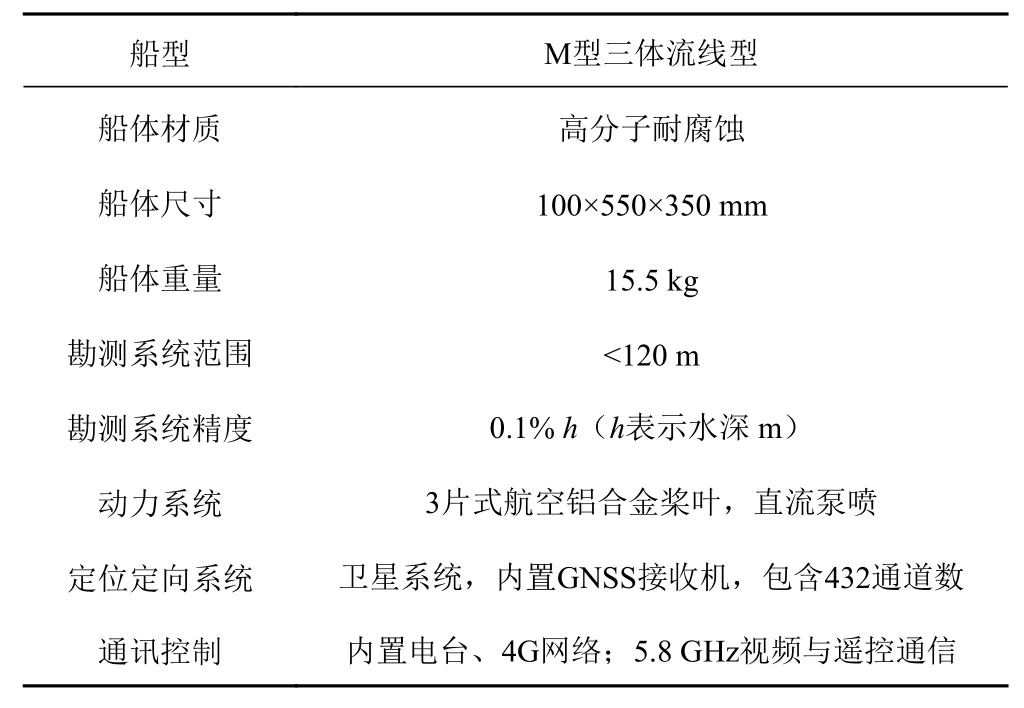
表1 研究对象相关参数Tab. 1 Relevant parameters of the research object
采用本文方法获取的研究对象最优航行路径规划结果,如图1 所示。图中,黑色方块为研究对象工作环境中的障碍物与危险区域,白色圆形为研究对象的起始点坐标与终点坐标。

图1 本文方法航行路径自主规划结果Fig. 1 The results of autonomous navigation path planning using the method presented in this article
分析图1 可知,采用本文方法能够有效构建研究对象工作环境模型,同时通过计算能够有效获取研究对象最优航行路径,该路径能够有效避开全部障碍物与危险区域。
为验证本文方法航行路径规划结果的优势性,对比采用本文方法前后研究对象的航行路径,结果如表2所示。

表2 研究对象航行路径对比结果Tab. 2 Comparison results of navigation paths of research subjects
分析表2 可知,采用本文方法对研究对象航行路径进行规划后,最优路径长度与采用本文方法前相比减少1.586 1 km,平均能耗降低6.4211 kJ,路径规划时间降低3.565 s。以上数据充分说明采用本文方法能够有效保障研究对象航行路径规划的精度与实时性,降低研究对象航行能耗,保障研究对象航行过程中的经济性。
3 结 语
本文研究了一种基于混合蚁群算法的无人船航行路径自主规划方法,在工作环境模型基础上构建航行路径规划数学模型,并采用混合蚁群算法求解模型。实验结果显示,本文方法所构建的工作环境模型较为准确,所得最优路径规划结果路径最短、能耗最低。
