基于作业任务的智能船舶性能测试场景规划
2024-01-03张琳丹
张琳丹,倪 天,朱 忠,李 龙
(1. 中国船舶科学研究中心, 江苏 无锡 214082;2. 深海技术科学太湖实验室, 江苏 无锡 214082;3. 上海交通大学 船舶海洋与建筑工程学院, 上海 200240)
0 引 言
传统船舶性能测试主要包括虚拟仿真、模型实验及实船试验3 种类型,其中模型实验又涉及水池验证和外场验证[1]。近年来随着数字孪生技术的引入,虚拟仿真与模型实验相结合的智能船舶性能测试模式具备经济、高效等优势[2-3],越来越受到关注。
无论传统测试模式还是虚实结合测试模式,智能船舶性能测试都离不开以作业任务为导向的典型工况和测试场景规划[4]。
本文围绕自主感知、自主避障等智能船舶的核心功能测试展开,并利用虚拟仿真实验与水池模型实验相结合的方式,针对典型作业任务需求进行智能船舶功能分解,提出一种基于作业任务的智能船舶性能测试场景规划。
1 智能船舶应用需求
1.1 海洋科学调查
海洋科考是传统海洋装备的重点应用领域之一,传统海洋科学调查船受限于人力、物力和时间的影响,难以取得连续的长周期大范围海洋调查数据,而智能船舶在无人自动化执行作业任务拥有着优势,未来海洋科考领域对智能船舶的应用需求会愈发增多。
对智能船舶来讲,在传统海洋科考船适用的作业任务之中,除了必须有科学家随船的原位观测与实验以外,海洋环境探测与仪器投放回收都能由智能船舶按照预先制定的任务流程进行自主作业。
1.2 海洋考古搜寻
海洋考古主要涉及调查、发掘和研究我国古代从事海洋活动的文化遗存,目前已有将智能船舶投入水下考古领域进行有人无人协同考古作业的实践[5]。
从学科分类的角度来说,航海考古是海洋考古的核心领域,而船舶考古与海港考古构成航海考古的2 个主要方面[6]。因此,海上考古任务主要指搜寻发现海中的古代沉船和淹没于水下的古代港口、码头等泊船设施遗迹,不仅包括沉船船体本身的遗存,还需要搜寻、发掘埋藏于水下或海底沉积物下各类船舶实物及相关遗存。
从考古调查的作业流程来说,水下考古通常首先根据史料分析划定文化遗存可能存在的区域,再派遣水下考古调查船前往该海域采用多种探测手段结合潜水探摸等对该区域进行精细化调查。
总体上看,在传统海洋考古调查作业任务中,遗迹搜寻和目标识别等任务都能由智能船舶按照事先规划进行自主作业。发现目标后,再由潜水员进行水下探摸,以降低海上作业成本并提高效率。
1.3 作业任务分解
智能船舶的各项性能技术指标可分为定量指标和定性指标[7],其中定量指标指含有具体数据的指标,如智能巡航时智能船舶可达到的最大航速等;定性指标则通常具有一定的模糊特征,无法直接进行定量描述,如智能船舶执行智能探测任务时的抗干扰、避障、识别能力等。
为了更全面、客观地对执行特定作业任务时智能船舶的综合性能进行评价,首先采用解析法从海洋科学调查与海洋考古搜寻的应用需求出发对典型作业任务进行分解。如图1 所示,从中提取出涉及具体任务的智能船舶5 大核心功能:机动避障、高速巡航、目标搜寻、目标识别和目标定位。其中,机动避障与高速巡航主要涉及智能船舶的航行性能,目标搜寻、目标识别和目标定位,可以概括为智能船舶的探测性能。
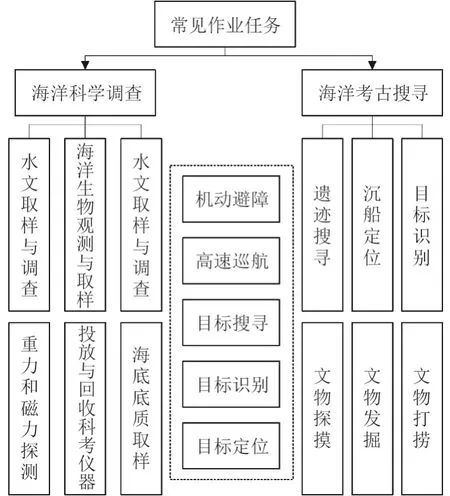
图1 常见作业任务分解Fig. 1 Scheme of common tasks
2 典型作业任务测试场景规划
在智能船舶应用需求分析的基础上,围绕航行与探测两类典型作业任务对智能船舶的性能测试场景进行规划。
2.1 智能航行测试
2.1.1 航行任务分解
智能航行是智能船舶核心功能的体现,是智能船舶性能测试验证首先要面向的对象[4]。对于海洋科学调查智能船来说,实际可能需要面对如迁徙鱼群、海底暗礁、海洋浮标等多种海洋地形地貌环境,其机动避障能力不可或缺。而海洋考古智能船相对来说可能需要在更广阔的海域对疑似海底遗存进行搜寻作业,考虑到电池能源动力等因素,在自主避障的基础上还需关注智能船舶的高速巡航性能[8]。
2.1.2 机动避障测试
在涉及机动避障的作业任务测试场景规划中,迁徙鱼群、海草海藻、海底暗礁、海洋浮标等障碍干扰物可模型简化为动态干扰物、悬浮干扰物和固定障碍物。
要求参试无人船缩比模型在一定时间内驶过设有若干模拟水下典型障碍物的水池测试区域,参试无人船模型在完成任务时不得触碰障碍物,检验参试无人船模型对常见海洋干扰环境的避障机动能力。
障碍物示例如图2 所示。
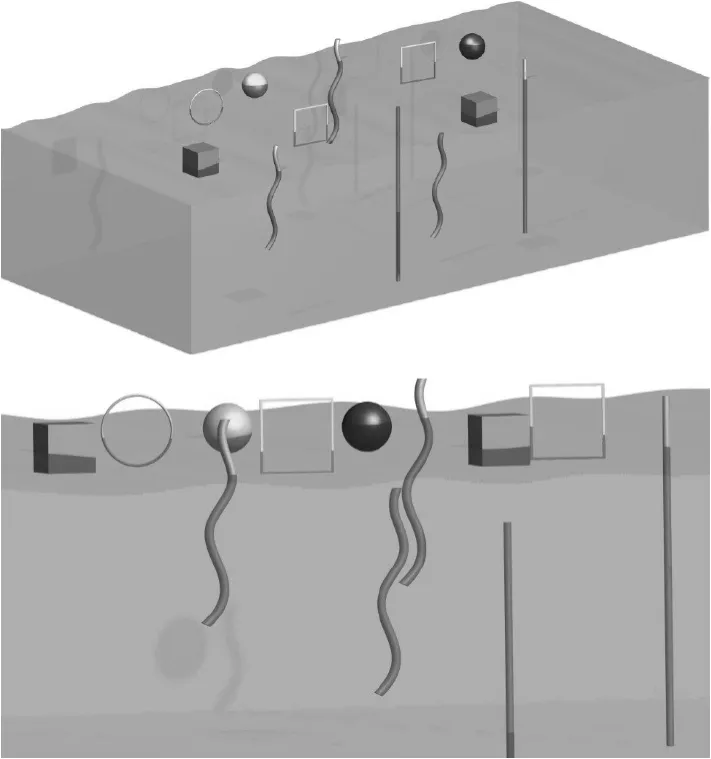
图2 机动避障测试场景设计Fig. 2 Scenario planning for mobility test
在测试中,参试无人船模型须穿过位于水池底部一定高度与宽度的彩色门框,门框前一定距离处分别设有模拟水草、缆绳等物体的若干彩色悬浮障碍物。无人船模型在完成穿过门框任务时,不得触碰障碍物。该项试验目的在于检验无人船模型在特定海流条件下的航行机动性能。此外, 与传统的固定障碍物避障测试相比,在设置的若干彩色悬浮障碍物中,底部固定的若干长度飘带状障碍物受水池中模拟水流环境影响存在一定范围的前后飘动,可通过模拟真实海洋环境中存在的可能对无人船模型产生缠绕的水草、悬浮绳索等障碍物,检验无人船模型抗干扰机动性能。参试无人船模型穿过门框的状态记为Si,与 动态或悬浮干扰物的接触状态记为Pi,与 固定障碍物的接触状态记为Qi,得 到机动避障测试结果矩阵如下:
式中:s,p,q分别为穿过门框、避开动态悬浮物、避开固定障碍物3 类机动避障任务的权重系数。
2.1.3 高速巡航测试
记录在不同海况条件下,参试无人船模型加速到一定航速所用时间,要求参试无人船模型在保持最大航速的情况下行驶1 min,绕固定目标物进行j次连续转弯,记录转弯半径r、转弯横倾角θ及用时t等变量,得到高速巡航测试结果Bj,检验参试无人船模型快速机动性能。
2.2 智能探测测试
2.2.1 探测任务分解
无论是海洋环境调查,还是海底遗迹调查,海洋科考和海洋考古作业任务的核心都在于“调查”,从功能的角度来讲即“探测”。智能船舶的探测能力按任务内容可分解为:识别特定目标物能力、搜寻动态目标物能力和定位固定(通常为沉底的)目标物能力。
2.2.2 目标搜寻测试
参试智能船模型须在不同海况条件下,从设于水池中不同高度的若干相似物体中,搜寻并锁定指定目标物。检验参试智能船模型在特定能见度条件下,对潜标浮标类悬浮目标物的机动搜寻及识别能力。
目标示例如图3 所示。
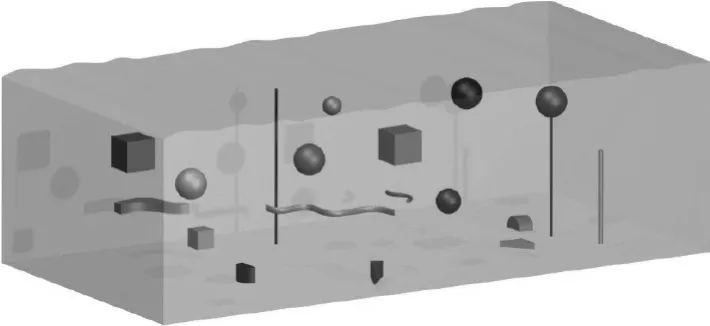
图3 目标搜寻测试场景规划示意图Fig. 3 Scenario planning for target searching test
参试智能船对悬浮目标第k次探测结果Ck按状态分别记为成功发现f、错认目标w、未发现目标m,从而得到目标搜寻测试结果矩阵C。
2.2.3 目标识别测试
考虑到目标样本库数据类型多样、数据量较大,模型或实船测试的可行性较差,故该项测试利用虚拟仿真试验平台进行。
要求参试智能船的数字孪生仿真模型从测试主办方准备的真实目标样本图片库中识别出若干指定目标(不同状态下的沉船、接驳盒、浮标、潜标等常见水下仪器设备)并检测出其位置,主办方提供训练库,测试时采用从训练库中随机抽取100 个目标构成测试库,检验参试智能船模型对各类常见目标物的静态识别能力。目标识别成功每个计1 分,不成功不计分。最终得分记为D。
2.2.4 目标定位测试
参试智能船模型在执行高速巡航测试的同时,须从水池底部装有不同形状物体的容器(用于模拟掩埋或局部泥沙环境,如试验水池可以满足将目标物固定或掩埋在池底的保障条件,则无需容器)中,识别出特定形状的目标物。检验参试智能船模型高速航行状态下,对海底掩埋目标物的探测识别及定位能力。
目标示例如图4 所示。

图4 沉底目标示意图Fig. 4 Examples of sunken targets
参试智能船对沉底目标第n次探测结果En按状态分别记为成功发现f、错认目标w、未发现目标m,整理得到目标搜寻测试结果矩阵E。
3 智能船舶综合性能评价
参考现行的传统船舶性能评价标准,基于智能航行与智能探测性能测试场景规划,将层次分析与模糊综合评判方法相结合,对参试智能船舶的航行与探测性能进行综合评价。
3.1 综合测试场景设计
综合测试场地设置如图5 所示。参试智能船模型示例运动路线在图中以箭头表示。试验水池区域划分为起始区、1 号机动避障测试区域、2 号悬浮目标搜寻测试区域、3 号沉底目标定位测试区域和终点区,预设一定的海况条件。记录参试智能船模型的n次测试结果Xn。

图5 测试场地示意图Fig. 5 Diagram of test field
综合测试流程规划如下:
步骤1测试前,参试智能船模型在起始区应完成所有调试准备工作,从起始点出发开始比赛后不得遥控操作,不得进行人工干预。测试前可进行练习。
步骤2发出起止信号后,参试智能船模型最前端离开起始线、进入1 号区域开始计时,参试智能船模型最前端离开3 号区域、接触终点线为止。
3.2 航行探测性能综合评价
现有智能船舶综合性能评价方法以系统分层解析和专家打分为主[9]。系统分层解析法从设备出发,但在针对实际任务的评价上不够全面;专家打分法结合设计及应用等领域内专家的意见,但评价较为主观。基于作业任务的智能船舶性能评价通过将实际任务测试场景自动化记录的客观结果与专家的主观测评结合,再依据不同智能船舶用户对各项任务的需求,利用统计学方法加以数据分析。最终确定该智能船舶面向任务的航行探测性能综合得分,“影像记录+数据分析+专家打分”的综合评价:
式中:α、β、σ、δ和ε依次为用户对各项测试任务重要性进行打分后,整理得到的单项测试权重系数。
4 结 语
本文针对带有模糊特征的智能船舶航行与探测性能指标,基于常见海洋科考和海洋考古作业任务,提出一种较为客观量化的性能测试场景规划及性能评估方法。通过对智能船舶在各项试验任务中的得分进行计算,得到该智能船舶在抗干扰机动性、静态避障率、动态避障率、水下悬浮物识别率、沉底目标物识别率、半掩埋目标物识别率和掩埋目标物识别率等智能航行与智能探测等性能的量化评价。在服务于海洋科考与海洋考古等作业任务的智能船舶设计与研制阶段,实施围绕作业任务的智能航行和智能探测等能力的综合量化评价,能够预测和评价智能船舶系统的实际作业能力,也可为今后智能船舶装备技术的改进升级和作业方案优化提供基础。
