基于方位导引的无人僚机着舰进近引导技术研究
2023-12-22张润哲刘雪娇王全喜
张润哲,刘雪娇,王全喜
基于方位导引的无人僚机着舰进近引导技术研究
张润哲,刘雪娇,王全喜
(海军研究院,北京 100036)
提出了一种由光电载荷、信息发送设备、信息接收设备和信息处理设备等组成的无人僚机着舰进近引导系统(CAGS),利用方位导引方法实现长机对无人僚机的着舰进近引导。该系统摆脱了对卫星导航技术的依赖,且无人僚机无需额外搭载用于进近引导的雷达或光电设备。
着舰引导;方位导引;无人僚机
0 引言
早在2015年,美军便提出“忠诚僚机”概念并不断完善,此后包括我国在内的多个国家持续对此开展作战概念研究。“忠诚僚机”旨在打造一系列与有人驾驶飞机相比性价比更高,与现有无人机相比功能性能更加出色的无人僚机系统,目前“忠诚僚机”尚停留在作战概念或初步试验阶段,暂未有成熟装备诞生[1]。无人僚机具有一定的人工智能水平,参考美国的“小精灵”无人机(Unmanned Aerial Vehicle,UAV),其巡航速度为0.9 Mh,可以无人机集群方式组网作战,也可与有人驾驶飞机密集编队、高效协同,执行协同侦察、制空作战和对陆攻击等任务,可使用多种平台发射和回收[2]。无人僚机可采用通用平台,根据任务需要灵活配置载荷,多架无人僚机可与一架或多架有人驾驶飞机组网协同作战。在可预见的未来,无人僚机可部署在航空母舰或两栖攻击舰等舰艇,可与陆基或舰载作战飞机进行编队作战,作战任务开始前,引导无人僚机起飞,抵近有人驾驶飞机并组网编队;任务结束后,引导无人僚机返回母舰[3]。
现有无人机着舰引导的一般流程为:
1)通过卫通数据链向无人机发送返回指令,使其保持一定飞行高度并飞行至母舰视距范围内;
2)母舰通过无人机起降引导数据链与无人机建立联系,获取无人机位置、航向、航速和高度等状态信息;
3)编队批准无人机着舰进近后,通过无人机起降引导数据链以较低数据率引导无人机飞向母舰进行着舰进近;
4)无人机距母舰距离、高度和速度等满足着舰最终阶段要求时,通过无人机起降引导数据链以较高数据率引导无人机最终着舰[4]。现有无人机着舰引导全程需要通过卫星导航获取母舰和无人机平台位置信息,尤其是最终着舰阶段[5],更是需要通过实时差分定位(Real-Time Kinematic,RTK)卫导技术获取母舰和无人机平台极高的定位精度(≤1 m)。
现有无人机着舰对卫星导航技术的依赖,决定了在战时一旦遭遇卫导拒止,无人机将无法完成着舰,因此亟需发展卫导拒止条件下的无人机高精度着舰引导技术。
1 无人僚机着舰进近引导系统组成
基于方位导引的无人僚机着舰进近引导系统如图1所示,包括长机和无人僚机。


2 无人僚机着舰进近引导系统工作原理
系统准备时需将光电载荷中的光电探测设备和测距设备一并安装于同一伺服机构,将以上设备基准线标校一致并与伺服机构的方位零位与俯仰零位保持一致,将光电载荷安装于长机平台,确保伺服机构的零位线方向与长机平台基准线方向一致。如图2所示。

图2 无人僚机着舰进近引导系统示意图
1)长机与伴飞僚机前往母舰附近区域
2)长机引导僚机飞向母舰,准备着舰进近


式中,为的辐角。
长机载机坐标系复平面中位置量的定义如图4所示,在长机载机坐标系的复平面中,母舰的位置矢量,如式(2)所示

式中,为的辐角。
光电载荷将以上信息输出至信息发送设备,信息发送设备将以上信息作为着舰进近引导指令信息发送至无人僚机的信息接收设备,引导无人僚机飞向母舰。信息发送设备在每个着舰进近引导指令周期末将着舰进近引导指令发送至信息接收设备。

由式(1)和式(3),可获取无人僚机在长机载机坐标系中的速度矢量如式(4)所示

幅角

3)长机对无人僚机进行着舰进近引导直至无人僚机由母舰接管





由式(1)和式(9),有

此时长机载机坐标系复平面中母舰位置矢量和母舰相对无人僚机位置矢量如式(12)和式(13)所示。





此时,

(3)将步骤(2)反复迭代,无人僚机接收若干批次着舰进近引导指令,直至无人僚机飞抵母舰附近,无人僚机至母舰距离和高度满足最终着舰阶段要求,如图5所示。
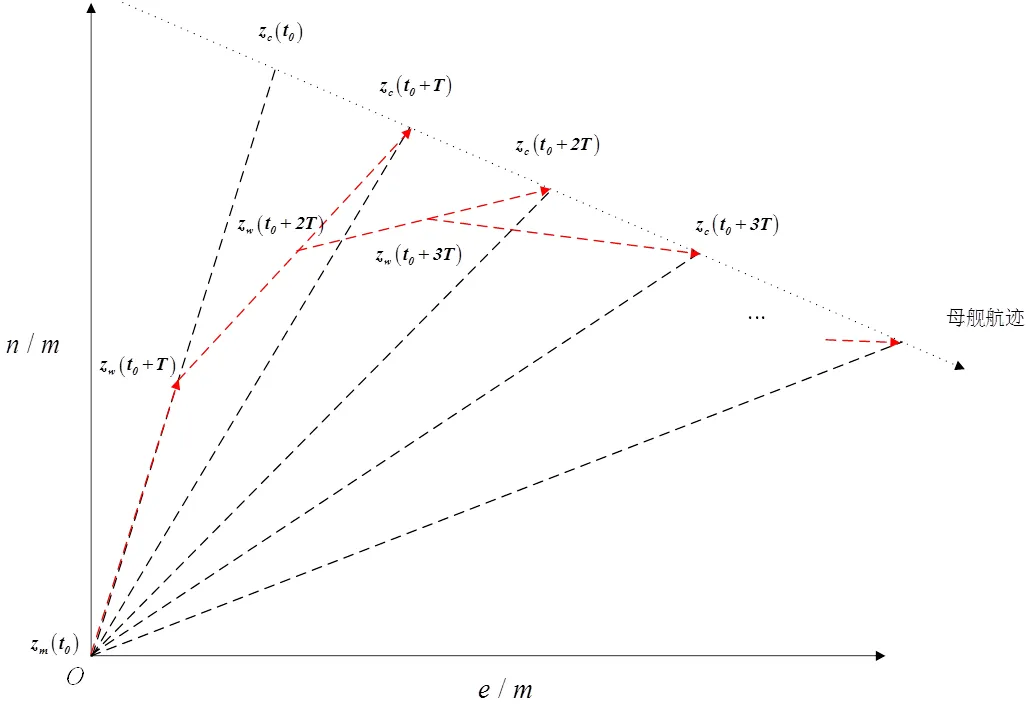
图5 长机载机坐标系中着舰进近引导工作流程示意图
4)着舰进近引导阶段结束,无人僚机由母舰接管
3 无人僚机着舰进近引导仿真分析
设定仿真的想定如下:首先在大地坐标系中设定长机平台和母舰的初始位置和状态,如图6所示。
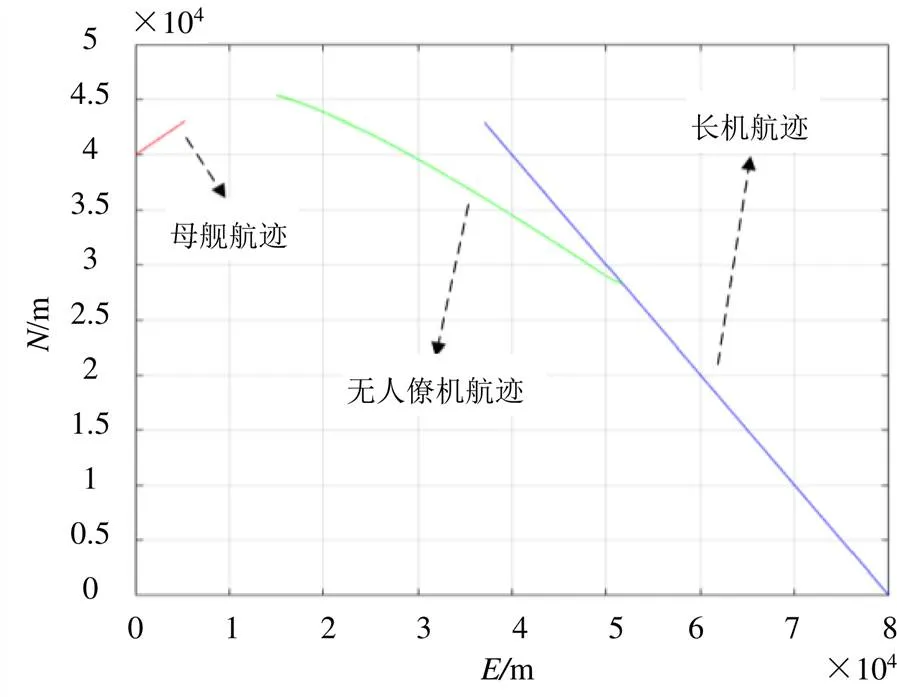
图6 大地坐标系中航迹示意图
1)长机

2)母舰
3)无人僚机

σ=602.77 s (RMS),1 000次独立重复试验中σmax=620.24 s,σmin=589.33 s;
ΔR=246.71 m (RMS),1 000次独立重复试验中ΔRmax=446.33 m,ΔRmin=3.87 m。

图7 长机载机坐标系中航迹示意图
图8 长机向无人僚机发送着舰进近引导指令周期总数统计示意图
图9 无人僚机由母舰接管时刻统计示意图
图10 无人僚机由母舰接管时系统定位精度统计示意图
4 结语
本文提出了一种基于方位导引的无人僚机着舰进近引导系统,该系统通过长机搭载的光电载荷探测航行中的母舰,形成无人僚机的方位导引信息,引导无人僚机飞近母舰完成进近。该系统摆脱了无人机着舰进近引导对卫星导航技术的依赖,全程无需获取长机平台和无人僚机的精确地理坐标,在卫导拒止条件下依然能够抵近母舰;并且无人僚机进近全程接收长机发送的着舰进近引导指令,无需自行对母舰方位、俯仰和距离等信息进行探测,可节约无人僚机有限的载重量,以便增加其它有效任务载荷。
[1] 罗伯特肖. 战斗机空战:战术与机动(下)[M]. 北京:中国市场出版社,2018.
[2] Major Paul Calhoun. DARPA emerging technologies[J]. Air & Space Power Journal,2016(12).
[3] JOHN W.Configuration design development of the navy UCAS-D X47-B[J]. Bulletin of the World Health Organizatoin,2015,87(11):824-832.
[4] Ferrier,Bernard. Fire scout UAV launch and recovery system performance improvement[C]. AUVSI Unmanned Systems,2014,1106-1128.
[5] Wasson J P,Moresve J. Automatic decking of UAV helicopters on a ship [J]. Navigation,2009,57(228):19-44.
[6] Baeriswyl P, Schildknecht T,Springer T,et al.Time Transfer with Geodetic GPS Receivers Using Code and Phase Observations [C]// 10th International Conference on European Frequency and Time. Brighton: IET,1996:430-435.
[7] 毛虎,吴德伟,闫占杰. 针对GPS接收机性能的压制干扰区域分析[J]. 宇航学报,2014,35(9):1078-1086.
[8] René Jr Landry,Boutin P,Constantinescu A. New anti-jamming technique for GPS and GALILEO receivers using adaptive FADP filter [J]. Digital Signal Processing,2006,16(3):255-274.
[9] 赵丹宁,雷雨. GLONASS 星载原子钟的长期特性分析[J]. 武汉大学学报(信息科学版),2021,46(6): 895-904.
[10]Ai Q,Yuan Y,Xu T,et al. Time and frequency characterization of GLONASS and Galileo on-board clocks[J]. Measurement Science and Technology,2020,31(6):065003.
Carrier Approach Guidance Technology Based on Azimuthal Guiding Technique
ZHANG Runzhe, LIU Xuejiao, WANG Quanxi
An airborne Carrier Approach Guidance System (CAGS) is proposed which consists of photoelectric load, transmitting device, receiving device, data processing device, etc. CAGS implemented the leader-wingman azimuthal guiding technique for Unmanned Aerial Vehicle wingman carrier approach. CAGS is a satellite-free system that doesn’t rely on landing approach devices such as radar or photoelectric device carried by UAV.
Carrier Approach; Azimuthal Guiding; Unmanned Aerial Vehicle Wingman
V279
A
1674-7976-(2023)-06-416-06
2023-09-20。
张润哲(1990.02—),山东蓬莱人,硕士,主要研究方向为雷达领域研究。
