分布式驱动电动汽车转矩优化分配的分析
2023-12-13赵曰贺鹿鹏程张端军
赵曰贺,鹿鹏程,张端军,马 超
分布式驱动电动汽车转矩优化分配的分析
赵曰贺,鹿鹏程,张端军,马 超
(江苏建筑职业技术学院 智能制造学院,江苏 徐州 221000)
采用分布式驱动的新能源电动汽车,其驱动转矩的分配摆脱了传统驱动装置固有的束缚,从而获得了提升自身性能的极大潜力。文章以某运动型分布式驱动电动汽车为对象,通过优化分配各车轮驱动转矩来提高车辆的多项行驶性能。根据分布式驱动电动汽车的驱动特点,使用CarSim和Simulink联合建立了车辆动力学模型;以车辆能效优化及稳定性为控制目标分别设计了相应的转矩优化分配控制策略;为解决多目标同时控制时互相干涉的问题,在各控制策略之上设计了多目标联合控制策略;最后选择典型工况进行仿真实验,实验表明:基于各目标的单个转矩优化分配控制策略都达到了良好的控制效果;在多目标联合控制策略的调控下,各转矩优化分配控制策略可以协调工作,根据实际情况各自发挥能效。
分布式驱动电动汽车;转矩优化;能效优化;稳定性控制
随着能源短缺和环境污染等问题的日益突出,新能源汽车已经成为汽车产业的主流。而分布式驱动电动汽车,因其传动机构简洁、传动效率高以及四轮转矩单独可控等优点,成为新能源汽车最有前景的发展分支[1]。国外较早开始研究分布式驱动电动汽车,众多车企推出分布式驱动概念样车,代表车型有丰田ME.WE、奔驰SLS AMG电动版等。在我国,众多实力雄厚的汽车一线品牌及电机企业,纷纷加大对分布式驱动的投入。比亚迪、长江客车的分布式驱动电动客车在2014年相继问世;2023年,采用“易四方”技术的比亚迪U8分布式驱动电动汽车在上海亮相。
为降低车辆能耗并提高车辆稳定性,人们设计了制动防抱死系统(Anti-lock Braking System, ABS)、电子稳定系统(Electronic Stability Program, ESP)、 防滑系统(Acceleration Slip Regulation, ASR)等多种车辆辅助系统。显然这些辅助系统都是基于集中式传动系统设计的,而对于分布式驱动电动汽车,因其各车轮转矩可以单独控制,在实现降低能耗或并提高稳定性时可以从转矩优化分配的角度着手设计[2]。
本文根据分布式驱动电动汽车的特点,通过转矩优化分配控制车轮的纵向滑移率,降低车辆起步或加速工况的能耗;通过转矩优化分配控制车辆横摆角速度,提高车辆的横摆稳定性;通过转矩优化分配控制车辆的横向载荷转移率(Late- ral-load Transfer Rate, LTR),提高车辆的侧倾稳定性;再通过多目标联合控制策略使各控制策略可以协调工作;最后通过仿真实验验证所设计控制策略的有效性。
1 分布式驱动电动汽车建模
CarSim软件中已有内置的车辆模块,建立车辆模型时,需要选择所需模块并设置相应的参数。首先在车身模块中设置车辆尺寸及质量等参数;其次设置车辆模型的传动系统,由于CarSim软件中没有分布式驱动系统,所以需要在驱动系统中将CarSim中车辆的动力部分完全断开,通过Simulink-CarSim联合的形式,由Simulink模拟产生轮毂电机的动力并将动力分别输送给CarSim车辆模型的各个车轮;最后在行驶模块中设置车轮参数及行驶路况等。图1为CarSim车辆模型的搭建。

图1 CarSim车辆模型搭建
某分布式驱动电动汽车基本参数如表1所述。

表1 某分布式驱动电动汽车基本参数
2 车辆能效优化控制
车辆行驶过程中需要频繁的变速,在加速过程中,会使车轮产生一定的纵向滑移率。研究表明加速工况下的纵向滑移率小于10%时,车辆能耗较低。若车轮转矩过大,则会使车轮纵向滑移率超过10%,继而降低能量使用效率。为提高该工况的能量使用效率,需要在行驶过程中对各车轮的转矩加以控制,以防止纵向滑移率过大[3]。
2.1 车辆能效优化控制策略
考虑到后面要进行多目标转矩优化联合控制,为保证整个系统能快速稳定的运行,需要选择最为可靠的控制器。
比例积分微分(Proportion Integration Differe- ntiation, PID)控制器是工程应用中最为成熟的控制器,其原理公式如下:

由式(1)可知,增大P值可以有效增大误差信号,提高系统增益,而I对应的积分环节则通过对误差信号积分进行反馈控制,因此,只要时间无限长,静差是可以完全被消除的。D反映了误差信号的变化趋势,通过对误差信号的微分,具有提前控制功能。对于PID三个参数的调节。设计控制器时,合理设置P、I、D的值,控制器便可达到良好的控制效果。
在实时能效优化控制时,以车轮的纵向滑移率为控制目标。当监测到某个车轮的纵向滑移率超过10%时,控制器开始工作,快速降低该车轮轮毂电机的扭矩,继而使该车轮得纵向滑移率降至10%以下。
2.2 车辆能效优化控制仿真实验
仿真实验工况:设置车辆从0开始直线加速到100 km/h,设置路面附着系数为0.6。实验结果如图2所示。
图2为车轮纵向滑移率的情况,从中可以看出,在未施加控制的情况下,车轮的车轮滑移率达到了20%,施加控制后车轮滑移率控制在10%以下。

图2 车轮纵向滑移率
图3为车辆能量利用情况,车辆分别加速到了100 km/h,并且分别行驶至200 m。施加控制的车辆使用的能耗比未施加控制的车辆能耗降低10%。
图4为车辆加速度情况,可以看出虽然施加控制的车辆消耗的能量减少,但车辆加速能力几乎没有损失。

图3 车辆能量消耗
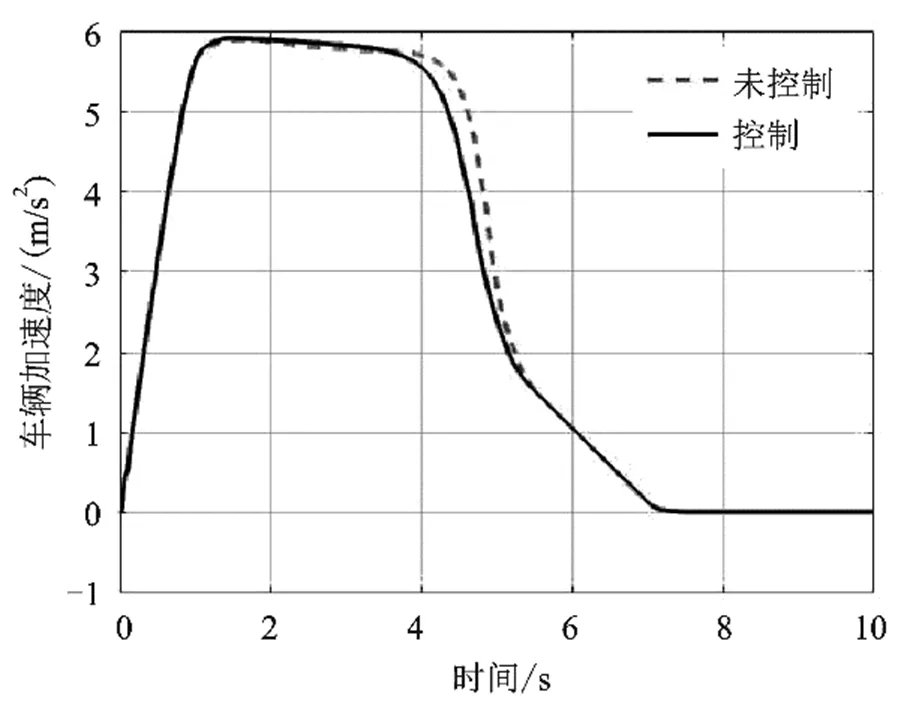
图4 车辆加速度
以上充分证明了本节所设计的PID控制器及转矩优化分配控制方式能有效降低车辆能耗。
3 车辆横摆稳定性控制
车辆在转向行驶过程中,当轮胎侧向附着达到极限时就会发生侧滑,前轮侧滑将会引起转向不足,而后轮发生侧滑则会引起转向过度。转向不足会使车辆不按照驾驶员的意图行驶,转向过度则会有使车辆发生甩尾的危险情况
3.1 车辆横摆稳定性控制策略
基于PID控制器的诸多优点,横摆稳定性控制也选用PID控制器。
在实时横摆稳定性控制时,以车辆的横摆角速度为控制目标。通过转矩优化分配,增加或减小左侧车轮驱动转矩的同时减小或增加右侧车轮的驱动转矩,从而使车辆获得一个横摆力矩,利用横摆力矩就可以控制车辆的横摆角速度。
车辆二自由度模型描述了车辆的横摆运动和侧向运动,其特点是能够良好的反馈车辆线性运动状态。为了得到车辆中性转向应有的横摆角速度,需要使用车辆二自由度模型作为参考[4]。车辆二自由度模型公式如下:


式中,1、2分别为车辆前后轮的侧偏刚度,为车辆侧偏角;r为车辆横摆角速度;、分别为车辆质心到前后轴的距离;为车辆前轮转角;为车辆纵向速度;为车辆横向速度。
3.2 车辆横摆稳定性控制仿真实验
仿真实验工况:设置车辆前轮转向角输入为=4sin0.5π,设置车速为70 km/h。实验结果如图5所示。

图5 车辆横摆角速度
如图5所示,未施加控制的车辆在转弯时其横摆角速度偏小,说明其处于转向不足状态;而施加了转矩优化控制的车辆,其横摆角速度与理想值几乎重合,车辆处于中性转向状态。这充分证明了本节所设计的PID控制器及转矩优化分配控制方式能有效提高车辆横摆稳定性。
4 车辆防侧翻控制
车辆在转向过程中,当车速过快或转向角过大时,由于车辆离心力的原因,车辆有发生侧翻的危险。
4.1 车辆防侧翻控制策略
车辆转向时,在离心力的作用下,其转向内侧车轮所承受的载荷减小,外侧车轮所承受的载荷增大。由此,有学者提出了用于判断车辆侧翻危险的指标——车辆横向载荷转移率(Lateral Load Transferrate, LTR),其表达式为

由式(4)可知,当LTR的值接近0时,说明两侧车轮均摊车辆载荷,车辆安全行驶;当LTR的值接近1或-1,说明一侧车轮几乎离地,载荷完全由另一侧车轮承担,车辆即将侧翻[5]。
在实施车辆防侧翻控制时,可以通过转矩优化分配,减小外侧车辆驱动转矩(可以为负,此时电机工作于发电工况)。如此,首先车辆车速被减小,车辆侧翻情况被缓解;同时车辆也获得一个横摆力矩,车辆侧倾运动得到改善。车辆防侧翻控制继续使用PID控制器。
4.2 车辆防侧翻控制仿真实验
本节选取J-Turn工况进行防侧翻控制仿真实验,车辆以100 km/h的速度匀速行驶,在1 s时刻对车辆前轮施加5°的转向角。实验结果如图6所示。
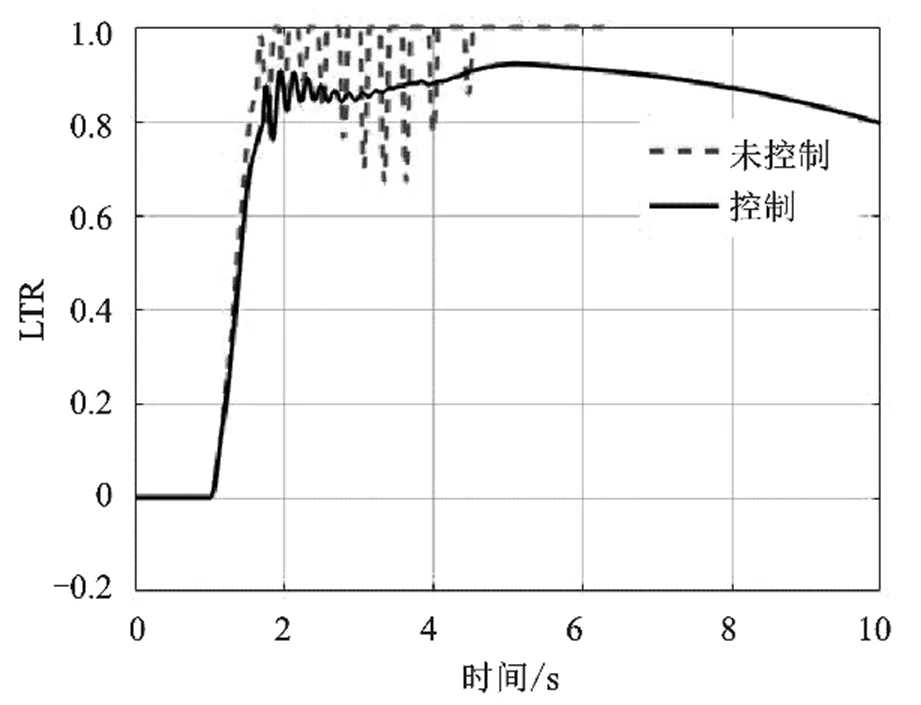
图6 车辆LTR实验结果
如图6所示,未施加控制的车辆,其LTR值达到1(甚至可以认为超过1),说明一侧车轮已经离地,并且在第6 s时车辆发生了侧翻;而施加了转矩优化控制的车辆,其LTR值始终控制在0.8~0.9之间,车辆没有侧翻。比较上述数据可知,所设计的车辆防侧翻控制策略可以将车辆LTR值降低15%。这充分证明了本节所设计的PID控制器及转矩优化分配控制方式能有效防止车辆侧翻。
5 转矩优化分配多目标联合控制
前面叙述中,分别使用转矩优化分配的方式实现了车辆的能效优化控制、横摆稳定性控制以及防侧翻控制。然而,在车辆实际行驶过程中,车辆不可能同一时刻只面临其中一种不良行驶状态。当车辆对多种行驶状态同时实施控制时,不同的控制策略之间必然会互相干涉,从而使一个或多个控制策略达不到良好的控制效果。因此,需要在这几个控制策略之上设计一个多目标联合控制策略来解决控制干涉的问题[6]。
5.1 转矩优化分配多目标联合控制策略
车辆行驶过程中,最重要的是保证车辆的安全。三种不良行驶状态中,车辆侧翻无疑是最为致命的,车辆转向不足或转向过度有时也会导致安全问题发生(例如在路面附着系数较小时车辆发生甩尾等),而车轮纵向滑移基本不会引起安全问题。因此,需要根据车辆行驶状态的安全情况来协调各控制策略的控制强度。协调方式如表2所示。
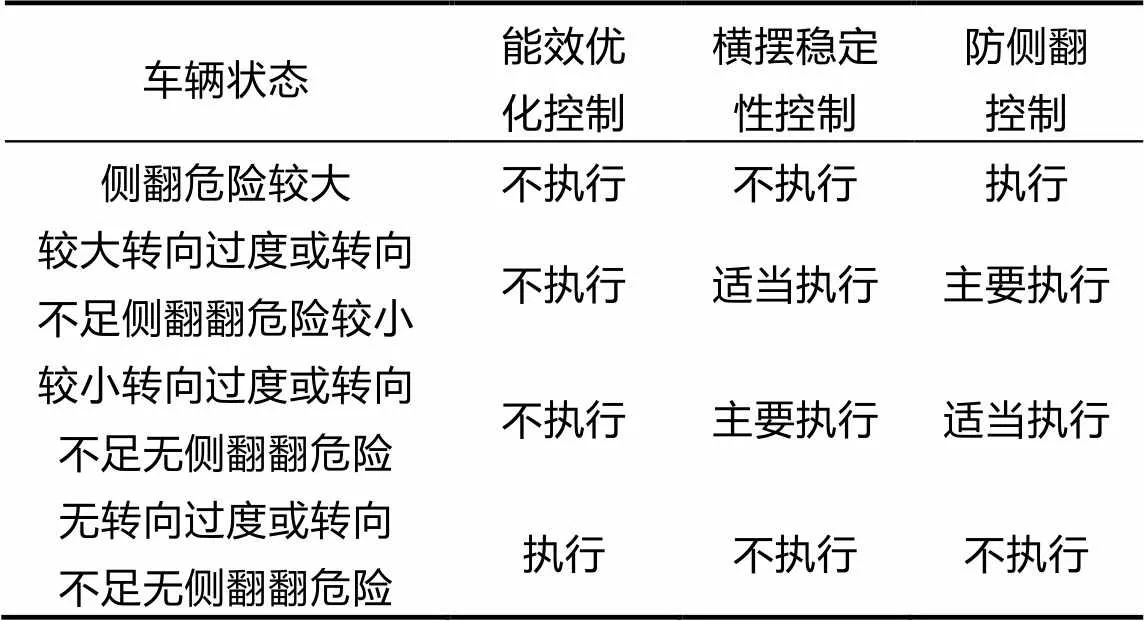
表2 联合控制策略协调方式
表2对协调方式的描述属于典型的规则型模糊信息。为有效的依据该信息对各控制策略进行协调,本文选择模糊控制器来模拟表2中的协调方式。模糊控制器可以模仿人类的推理思维,对没有明显界限的事物进行判断并给出妥善的解决方法。本节以车辆LTR值和车辆横摆角速度误差值为模糊控制器的输入量,通过模糊推理输出三个介于0和1之间的数值来对各分控制策略进行加权协调。联合控制框图如图7所示。
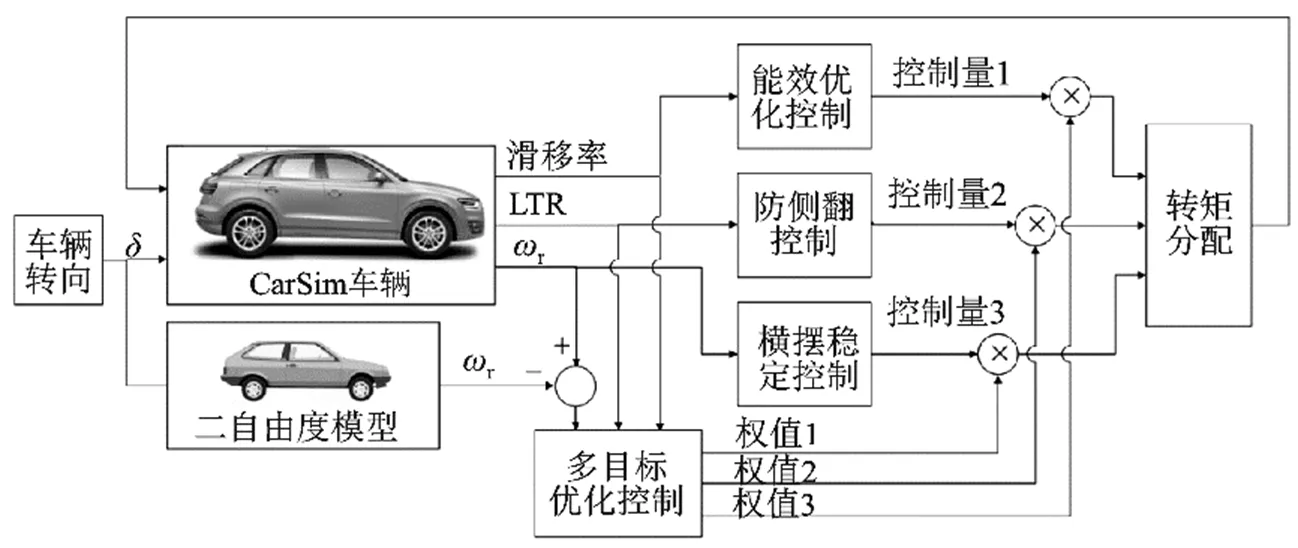
图7 联合控制框图
5.2 多目标联合控制仿真实验
仿真实验工况1:设置车辆前轮转向角由0°匀速增加至4°,设置车速为90 km/h。实验结果如图8、图9所示,在0~4 s时,因转向角较小,车辆LTR值很低,车辆无侧翻危险,此时车辆主要在执行横摆稳定性控制,不断使车辆横摆角速度逼近理想值;在4~6 s时,车辆LTR值较大,此时横摆稳定性控制和防侧翻控制同时作用于车辆,车辆进入轻微的转向不足状态;6 s时,车辆LTR值达到0.7,车辆有侧翻危险,此时车辆完全停止了横摆稳定性控制而全力执行防侧翻控制,车辆侧翻倾向被遏制住。比较车辆稳态下(8 s之后)的LTR值,可再次说明所设计的车辆防侧翻控制策略可以将车辆LTR值降低15%。
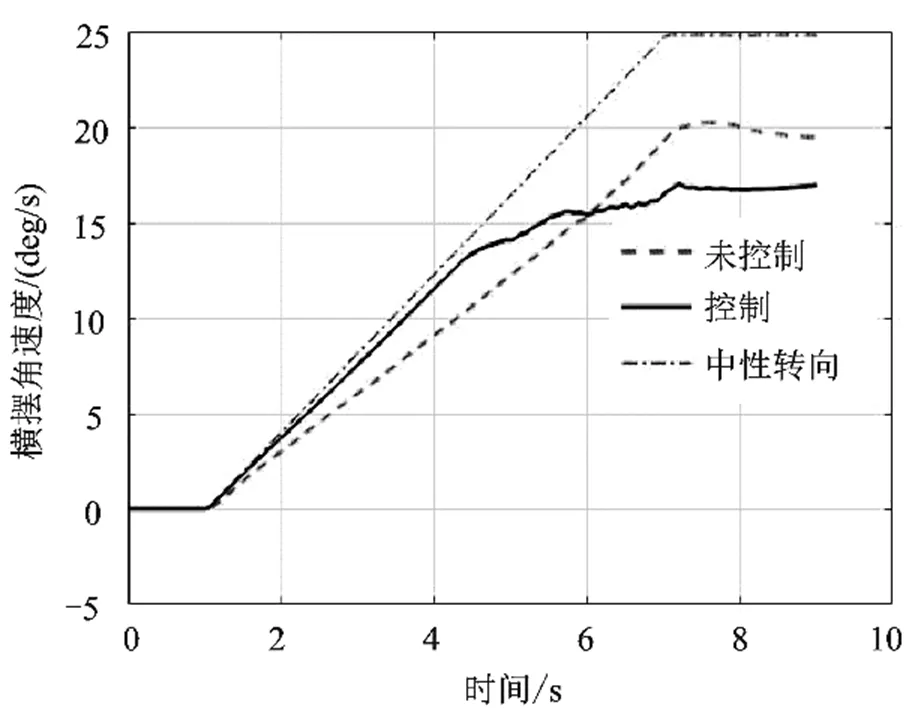
图8 联合控制下车辆横摆情况

图9 联合控制下车辆侧翻情况
如表2所示,当车辆存在侧翻危险或转向不足等行驶状态时,车辆的能效优化控制完全被屏蔽;当车辆既不存在侧翻危险,也不存在转向不足或转向过度时,车辆将全力执行能效优化控制。为进一步验证联合控制策略的该项功能,需要进行如下仿真实验。
仿真实验工况2:设置车辆从0开始直线加速到100 km/h,设置路面附着系数为0.6。实验结果如图10、图11所示,在联合控制策略的协调下,当车辆能效优化控制工作时,其可以有效控制车轮的滑移率,继而降低车辆的能量消耗。另外,与文章第二章节实验结果比较,可以看出,联合控制策略在协调各控制器进行工作时不会影响其原有的控制效果。
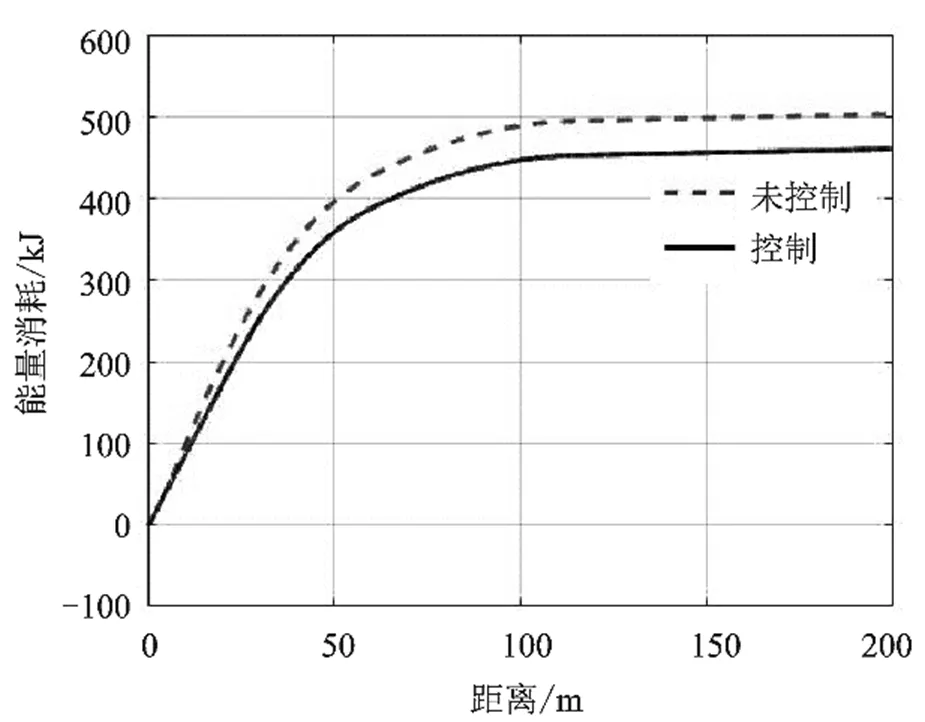
图11 联合控制下车辆能量消耗
6 总结
本文针对分布式驱动电动汽车的驱动特点,使用CarSim和Simulink联合建立了车辆动力学模型;通过转矩优化分配的方式限制车轮纵向滑移率,从而降低了车辆的能量消耗;通过转矩优化分配的方式减小横摆角速度误差,从而提高了车辆的横摆稳定性;通过转矩优化分配的方式降低车辆LTR值,从而提高了车辆防侧翻能力;以保障车辆安全为前提,在各控制策略之上设计了多目标联合控制策略。文中进行了大量的仿真实验,结果表明:
1)在加速工况中,所设计的车辆能效优化控制策略可以减少10%的能量消耗;
2)在车辆转向时,所设计车辆横摆稳定性控制策略可以使车辆始终处于中性转向状态;
3)在车辆有侧翻危险时,所设计的车辆防侧翻控制策略可以将车辆LTR值降低15%,有效防止其侧翻;
4)多目标联合控制策略可以根据车辆的行驶状态,合理协调各分控制策略的执行强度,从而充分发挥其各自的效能。
[1] 王震坡,陈辛波,张雷,等.分布式驱动电动汽车关键技术及产业化展望[J].科技导报,2020,38(8):99-100.
[2] 黄亚东,郭桂芳.分布式驱动电动汽车转矩分配策略综述[J].汽车实用技术,2020,45(22):230-236,248.
[3] 张伦.轮边电机驱动电动汽车驱动防滑控制的研究[D].南京:东南大学,2019.
[4] 王东.分布式电动汽车横摆稳定性控制策略研究[J].汽车实用技术,2021,46(17):4-7.
[5] 金智林,陈国钰,赵万忠.轮毂电机驱动电动汽车的侧翻稳定性分析与控制[J].中国机械工程,2018,29(15): 1772-1779.
[6] 崔伟.轮毂电机驱动汽车路径跟踪及差动转向多目标控制研究[D].合肥:合肥工业大学,2020.
Analysis of Torque Optimization Allocation of Distributed Drive Electric Vehicles
ZHAO Yuehe, LU Pengcheng, ZHANG Duanjun, MA Chao
( School of Intelligent Manufacturing, Jiangsu Vocational Institute of Architectural Technology, Xuzhou 221000, China )
Electric vehicles using distributed drive have great potential to improve their performance by breaking free from the inherent constraints of traditional driving devices in terms of torque distribution. This article takes a sports distributed drive electric vehicle as the object, and improves the vehicle's multiple driving performance by optimizing the allocation of driving torque for each wheel. According to the driving characteristics of the distributed drive electric vehicle, a vehicle dynamics model is established by using CarSim and Simulink; Corresponding torque optimization allocation control strategies are designed with the control objectives of vehicle energy efficiency optimization and stability; To solve the problem of mutual interference during multi-objective simultaneous control, a multi-objective joint control strategy is designed; Finally, typical operating conditions are selected for simulation experiments, which shows that the torque optimization allocation control strategy based on each objective achieved good control effects; Under the regulation of multi-objective joint control strategy, each torque optimization allocation control strategy can work in coordination and exert energy efficiency according to the actual situation.
Distributed drive electric vehicle; Torque optimization; Energy efficiency optimization; Stability control
U461.1
A
1671-7988(2023)22-17-06
10.16638/j.cnki.1671-7988.2023.022.004
赵曰贺(1989-),男,硕士,助教,研究方向为分布式驱动电动汽车转矩优化控制,E-mail:1183988393@qq.com。
江苏建筑职业技术学院“新能源电动汽车分布式驱动系统转矩优化控制关键技术研究”(JYA319-18)。