基于多自由度机器人仿真工作站的设计与实现
2023-12-08姜海
姜海
(郑州信息工程职业学院,河南郑州,450121)
0 引言
RobotStudio 软件是ABB 工业机器人公司推出的一款机器人离线编程与仿真的计算机应用程序,它的独特之处在于它下载到实际机器人控制器的过程中没有翻译阶段。在实际构建机器人系统之前,RobotStudio 可以实现机器人系统的设计和试运行,从而实现对工业机器人工作站系统集成项目的优化。
在企业生产过程中,不同的产线或工位间需要物料的转移,传统采用人工方式既耗时又费力,特别对于体积较大,重量较重的物料,人工搬运存在一定的安全隐患。在机器换人的背景下,更多的企业引入码垛机器人。智能码垛机器人集成了传感器技术,可实现物料按设定的方式进行堆放与取出。码垛机器人替代人工搬运及码垛,降低了工人的劳动强度,提高了工作效率。
本文围绕搬运码垛工作站为例详细阐述多自由度工业机器人工作站设计思路以及整体布局,为能够更好地满足现代工业生产的需要,以提高工作效率为前提,帮助企业在工业生产中提供更加扎实的理论和实践依据。
1 工作站的搭建
■1.1 工作站设计方案
多自由度机器人工作站的设计是基于多自由度机器人与RoboStudio 离线仿真相结合实现工业自动化生产任务,该工作站既可以利用机器人在线示教编程实现,同时也可以结合工业机器人仿真平台进行离线编程。工作站选用了以ABB 工业机器人为主,并利用RoboStudio 仿真作为搭建平台,以物料搬运为任务载体详细阐述工作站布局、Smart组件的设置及应用。
■1.2 工作站工作流程
工作站利用Smart 组件模拟动态输送链,当左传送带有物料到达目标抓取位置时,传感器输出信号控制工业机器人抓取左传送带物料到达左堆放区域。当右传送带有物料到达目标抓取位置时,传感器输出信号控制工业机器人抓取右传送带物料到达右堆放区域。两侧物料堆放区设置存放物料上限为15件物料,分别按照指定位置有序摆放。堆放完成后,工业机器人返回传送带上方等待,堆放好的物料由叉车拉送至指定物料存放区域。
该工作站具体工作流程如图1 所示。
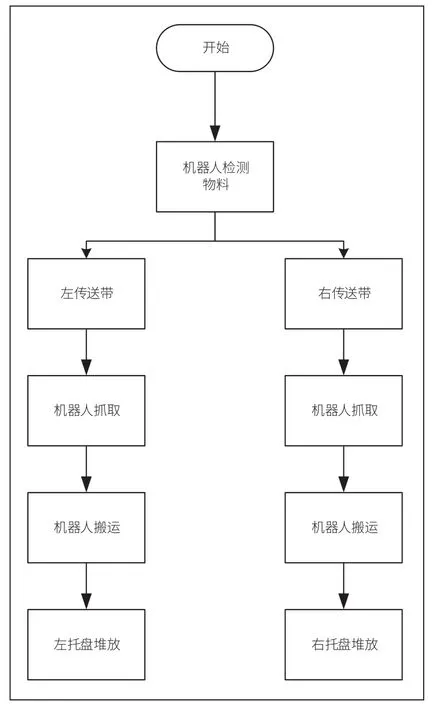
图1 工作流程图
■1.3 物料放置设计
工作站的物料遵循在工业生产中常见的大型箱体物料,箱体选用长600mm、宽400mm、高300mm 作为仿真对象。两侧物料堆放区分别设置为三层,每层摆放5 件物料,摆放按照竖2 横3 的布局形式,各层摆放布局如图2 所示。
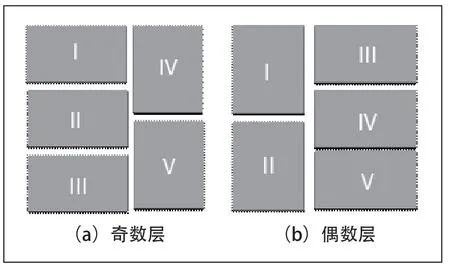
图2 码垛布局图
■1.4 工作站布局
工作站主要由多自由度机器人及传送系统组成,主要包括多自由度机器人、机器人控制柜、夹持式末端执行器、传送带、物料托盘、托盘垛、机器人底座、物料、电动叉车等,为保证整体作业安全工作站加装有安全防护装置。详细布局分布如图3 所示。

图3 工作站布局图
1.4.1 机器人
工作站选用ABB IRB460 型工业机器人,它是ABB 最快的码垛机器人。该机器人为四轴机器人是ABB 同类机器人中速度最快的,它占地面积小,非常适合现有的包装生产线,主要应用于码垛、拆垛及物料搬运。为了提高机器人工作范围及活动空间,在机器人底部加装尺寸为950mm×750mm×800mm 的底座。
1.4.2 末端执行器
高性能夹具对于工业机器人的码垛工作来讲,具有十分重要的现实意义,比较常用的码垛机器人末端夹具包括多种,例如组合式、吸附式、夹板式等。在具体应用的过程之中,必须结合产品的各种类型,选取不同的夹具。例如吸附式夹具一般应用在质量小,并且表面相对比较平整的工件之上;抓取式夹具一般应用在袋装物的码放上。应用夹具之后,可以有效扩宽码垛的应用范围。
该工作站采用夹板式手爪,夹板式手爪是码垛过程中最常用的一类手爪,常见的夹板式手爪有单板式和双板式。手爪主要用于整箱或规则盒码垛等。为了保证仿真可实现性,工作站使用的夹板式手爪是利用UG 三维创建的几何模型并导入RobotStudio 模型库中,对导入的工具几何模型需要进行位置、姿态的调整,设置本地原点,然后创建工具坐标框架,最后完成工具夹爪的创建。创建完成夹具后要把夹具设置为传感器不可检测,防止传感器误操作。如图4 所示。
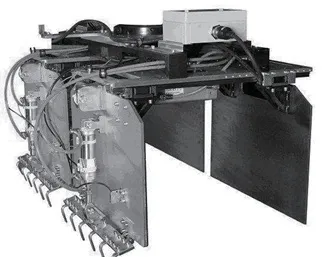
图4 机器人工具图
1.4.3 传送带
本工作站传送带选用的是RobotStudio 模型库自带的输送链400 型号,在工业机器人左右各放置一条输送链,分别对左右两个码盘进行产品输送。在输送链的末端分别安装有传感器,检测产品是否到位,通知工业机器人工作。
2 工作站仿真设计
■2.1 创建动态输送链
Smart 组件是一种在RobotStudio 中实现动画效果的高效工具,通过Smart 组件可以设定输送链产品源、输送链运动属性、限位传感器等,从而模拟实现物料的生成、物料随着输送链向前运动、物料到达输送链末端后停止运动、物料被移走后输送链前端再次生成产品等动作,依次循环。工作站左右两侧输送链设置方法一致。
2.1.1 创建输送链组件
首先从RobotStudio 模型库中加载两个输送链400 型放置在工作站合适位置,输送链放置的位置必须保证机器人机械臂的工作范围以内,方便实现物件的抓取和放置。同时方便提高后期机器人路径选择和示教器调试时的效率。然后创建新组件,将输送链模型分别加载至新创建的组件,从而完成输送链组件的创建。
2.1.2 创建输送链产品源
输送链组件内添加子组件Source,用于当接收到触发信号时复制物料对象成为产品源,从而实现根据需要源源不断地自动生成下一个新物料,其Source 属性设置为物料对象。
2.1.3 设置输送链运动属性
输送链组件内添加子组件Queue,使新复制的产品物料加入阵列队伍,从而有效控制物料在阵列队伍的位置和物料的移除。在子组件Source 的Copy 属性与子组件Queue 的Bank属性建立连接,实现每产生一个物料能够加入队列当中。
设置LinearMover 组件指定移动对象为Queue 组件新生成的物料实现对物料的运动、方向、速度及坐标的设定。
2.1.4 设置输送链限位传感器
为了能够有效感应到物料是否到达输送链末端位置需要在输送链末端位置添加限位传感,工作站中使用的是PlaneSensor 面传感器。通过该传感器能够使移动的物体停止,限位传感器一般安装在输送链末端位置,其长和宽基本与输送链挡板一致。在设置传感器属性时务必使传感器一直处于激活状态,并保证与传感器接触的周边设备属性设置为“不可由传感器检测”。
2.1.5 添加信号与连接
首先分别创建一个输入信号diStart_L,用于启动输送链运送物料,创建一个输出信号doBoxInPos_L,用于建立与机器人工业机器人之间的联系,使得机器人触发抓取、搬运动作。
其次当传感器输入0时,通过非门组件输出1 来控制Source 组件使能,在仿真中的表现也就是当传送带的尽头物品被移开时,始端会再复制进队列。各组件信号连接方式及设定如图5所示。
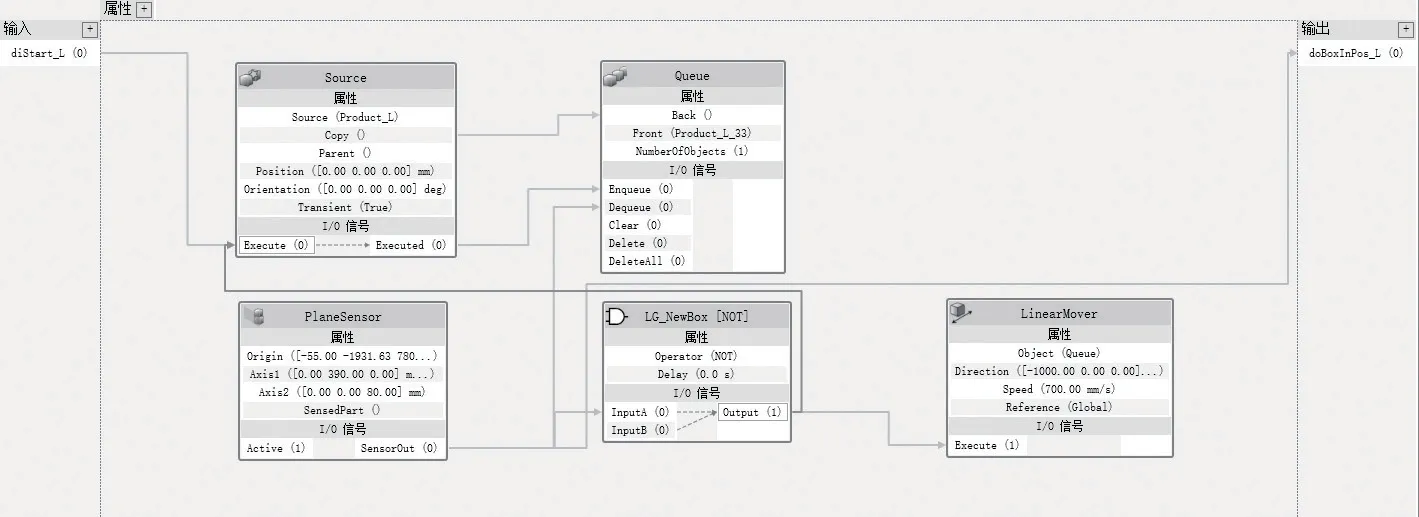
图5 各组件信号连接图
■2.2 创建动态夹具
将抓取工具放置在合适的位置后,重点还是为夹具设置一个Smart 组件来完成抓取工具的抓取和放置的动作。首先需要对手爪工具组件添加线传感器LineSensor,通过该传感器感应物料是否被抓取,为了保证传感器感应灵敏度需要设置线传感器半径在3mm 以上,长度要超出工具末端5mm。利用PoseMoveHook 组件控制手爪的张开、闭合及吊钩动作效果。通过Attacher 组件完成手爪拾取动作的设定,而释放动作则有组件Detacher组件来完成。手爪组件的属性设置及信号连接如图6 所示。
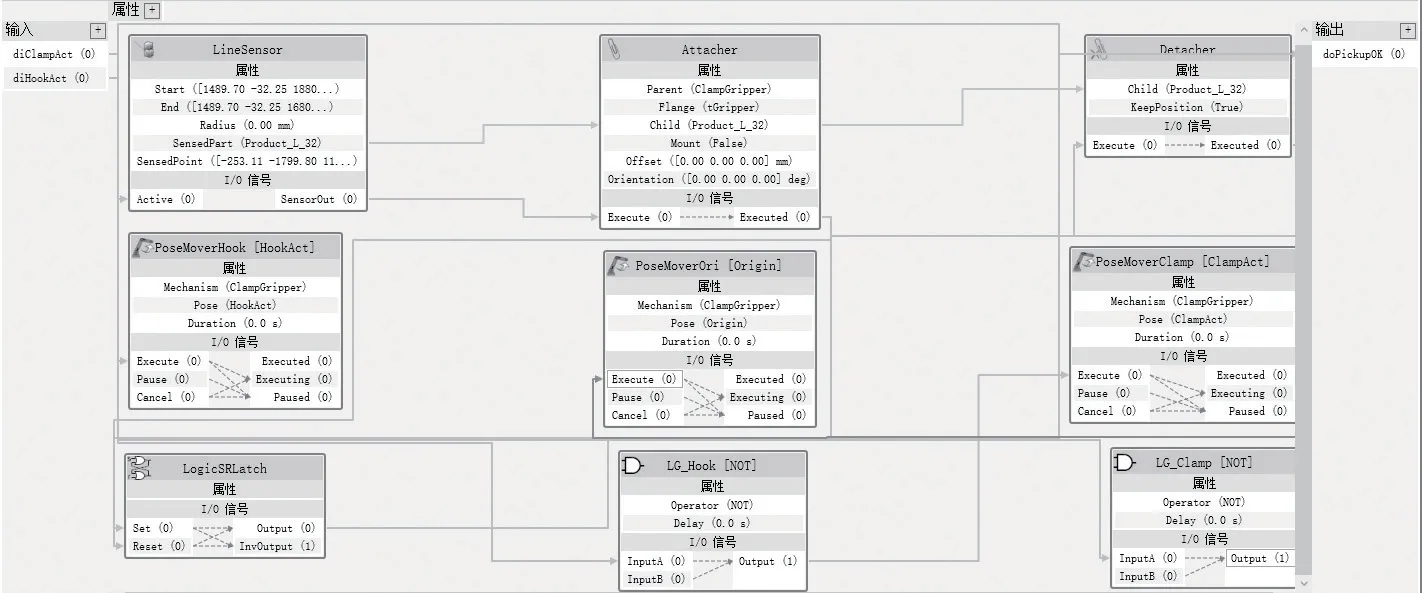
图6 各组件信号连接图
■2.3 设置工作站逻辑
2.3.1 创建机器人控制信号
在RobotStudio 仿真软件“控制”功能里的“配置”选项中“添加信号”设置工作站的输入输出信号,创建两个输入信号diBoxInpos_L 和diBoxInpos_R 分别接收左右两侧传送带物料是否达到目标位置。创建两个输出信号,一个输出信号负责控制手爪的抓取和释放,另一个输出信号负责还原手爪初始姿态。
2.3.2 设定工作站逻辑
在RobotStudio 仿真软件“仿真”功能里的“工作站逻辑”中设置机器人与各设备Smart 组件进行通信互联。工作站输入信号diBoxInpos_L 与传送带输出信号doBoxInpos_L 相连负责接收左侧传送带的感应信号,工作站输入信号diBoxInpos_R 与传送带输出信号doBoxInpos_R 相连负责接收右侧传送带的感应信号。当传送带输出信号输出“1”工作站接收该信号后控制机器人手爪到达目标位置完成物料的抓取和释放。
2.3.3 程序流程
在RobotStudio 仿真软件中采取离线编程方式,工作站在开始进行物料抓取作业之前需要对工业机器人工作状态进行初始化,需要判断目前托盘物料数量及规划物料抓取作业点位,保证作业任务能够高效完成。工作站作业示教流程如图7 所示。
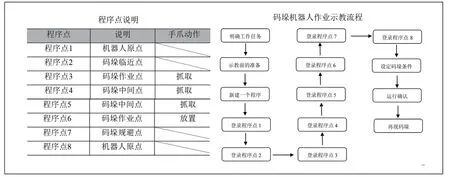
图7 作业示教流程图
2.3.4 编写程序
机器人抓取和放置物料是码垛过程中相当重要的一部分。机器人抓取和放置过程的部分代码如下:
3 结语
利用Smart 组件是工业机器人工作站模拟仿真的有效途径,通过仿真软件能够真实的还原企业生产场景,为企业生产项目前期方案论证提供可靠的可行性验证。
利用仿真软件模拟开发设计机器人工作站能够满足当前制造行业的发展需要,使制造行业的生产效率以及生产安全性有显著提高。就当前发展趋势而言,工业机器人在制造业中的应用还会向着更加高级方向发展,在制造业中的地位以及所发挥的作用越来越重要,应用范围也将更加广泛,也大大提高了企业的生产效率。
