面向自主创新的移动机器人高阶思维实践教学
2023-12-04李慧平张守旭
牛 云,李慧平,张守旭
(西北工业大学,西安 710072)
按照《中国教育现代化2035》[1]的战略部署和《机器人产业发展规划(2016—2020 年)》[2]对我国机器人人才培养提出的具体要求,机器人实践课程应更加注重激发学生兴趣,同时安排具有一定难度和挑战性的实践内容,以解决工程实际问题为牵引,提升学生项目开发及技术创新能力[3]。
国内外机器人实验教学设计与革新主要体现在实验手段、教学法、教学组织形式等几方面。美国的一项调查显示,机器人教学普遍缺乏合适的实验环境或场地以及低成本、灵活的实验平台[4],导致课容量不足,将高性能仿真、虚拟现实或远程实验室等方式融入机器人实践与创新教学是当前美国各高校重点探索的教学研究方向之一[5-6]。俄罗斯高校将工业界的最新需求及技术引入机器人教学,同时引入机器人仿真环境以缓解实践资金不足的问题[7]。德国、西班牙等国家的高校大力推广融合CDIO 等教育理念的机器人课堂教学、实训及创新实验的教学法革新[8-9]。
在国内,各大高校也积极开展旨在提升机器人等专业学生培养质量的课程改革与研究工作。东北师范大学马勋雕等[10]通过精细化的学习任务设计,构建旨在提升学习者高阶能力的智慧课堂;王宏等[11]研究了面向深度学习的STEM 教育模型,促使学习者基于个人知识体系和深度加工信息,提高实践操作能力和高阶思维能力;哈尔滨工业大学张近民等[12]围绕既有的机器人研发和实验教学平台,通过项目结合创新平台开展机器人课程实践教学改革,注重提升学生的实际工程问题解决能力。厦门大学林晓鹰等[13]运用TRIZ 创新流程,设计面向新品开发的自主实践教学法,让学生在“创造中学习”,取得了良好的效果。
综上所述,借助新技术手段,整合资源,构建新型实验教学法,激发学生通过高阶思维进行自主探究实验,是新形势下机器人实践教学的重要内涵,在国内外创新型课程体系设置中占有重要地位,需要深入研究。
本文充分利用网络共享资源及物理仿真等信息化手段设计符合学生认知规律的开放性、多层次、由易到难的实验进阶项目;融合翻转课堂和高阶思维工程教育理念,研究面向工程问题的“项目驱动式”的实践教学新模式,力求使学生在兴趣的驱使下,通过自主实践、深层次探讨、评价与改进,培育工程素养,提高解决工程问题及自主创新的能力。
一 实践课程体系与教学法改革
(一)基于认知规律的多层次实践课程体系设计
本文将机器人实体、物理仿真引擎、数字仿真相结合,构建如图1 所示的符合学生认知规律的机器人多层次实验课程体系。引导学生从理论应用到创新实践,循序渐进地获得工程实践高阶思维训练,进而提高解决复杂工程问题能力。
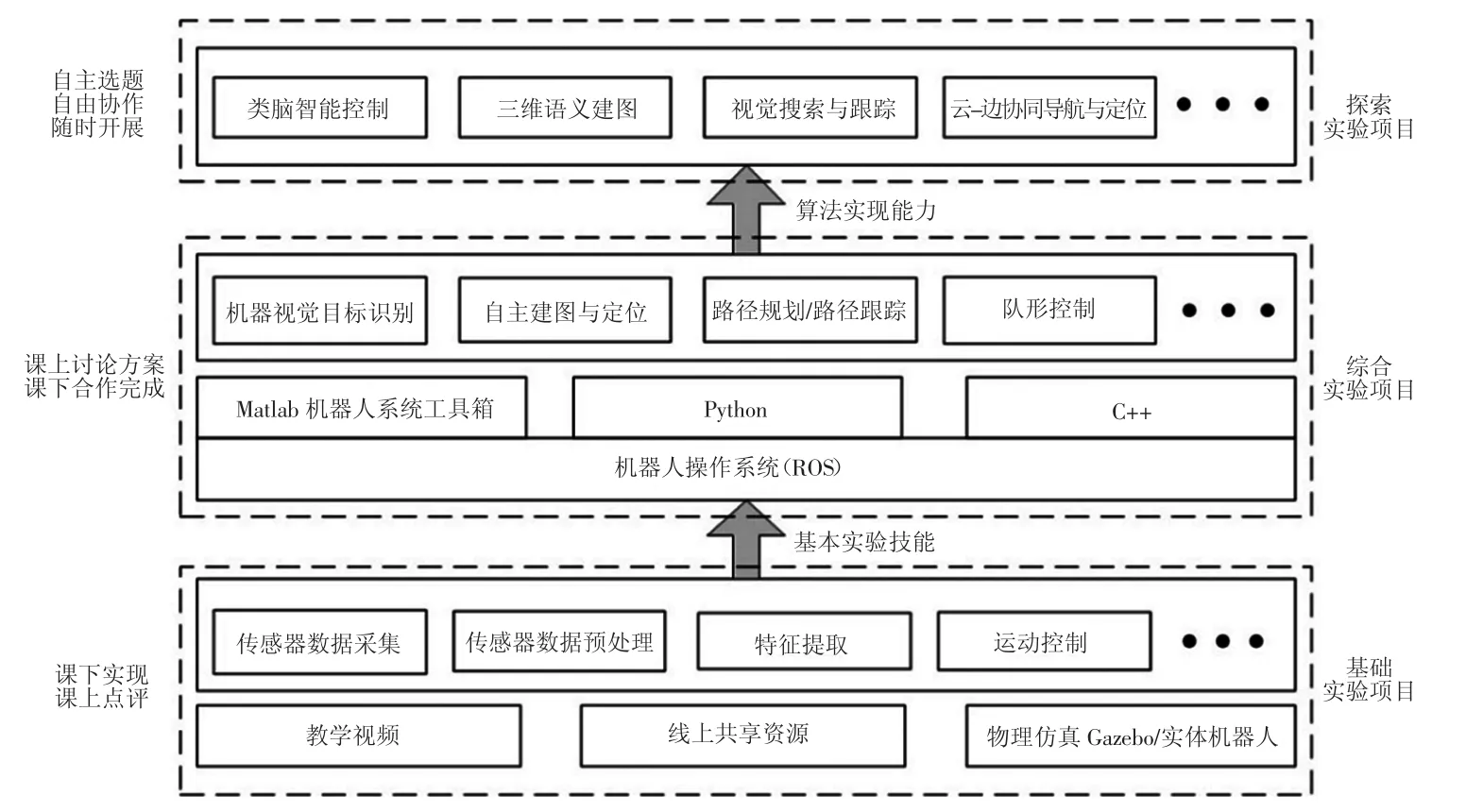
图1 移动机器人智能感知与控制多层次实验体系
“基础实验项目”旨在让学生掌握移动机器人实验所必备的编程框架、环境感知、运动控制机构的操作方法和基本实验技能。
“综合实验项目”面向移动机器人关键或热点技术设计实验内容,教师与学生探讨题目工程背景、任务书、实现方案等;学生组队合作完成相关算法的设计、编程和实验验证,锻炼对复杂工程任务的分析、综合、团队协作能力。
“探索实验项目”面向工程难题、前沿探索性议题或学生自选议题,为学生提供“开放性”的协同创新环境,支持学生自由探索。
(二)创新激励的“项目驱动式”高阶思维实践教学法
本文将高阶思维和“项目驱动式”实践教学相融合,首先通过合理创设面向工程实际或科研前沿的实践项目,引起学生兴趣,然后基于翻转课堂、探究式教学等手段,开展面向高阶思维培养的实践教学。教学过程如图2 所示,学生在课前借助教师发布的学习资料或其他资源自主学习必要基础知识、熟悉实验平台和工具软件。获得基本实验技能后,课外、课堂形成闭环互动式教学,课外,学生根据任务书进行算法开发、实验调试和技术验证,并将遇到的棘手问题反馈至课堂;课堂上教师组织学生进行交流互动,教师集中精力和时间与学生就其关心的关键难点、技术问题进行深入探讨,实现个性化指导和因材施教,培养学生的高阶思维能力,进而激发自主创新潜能。
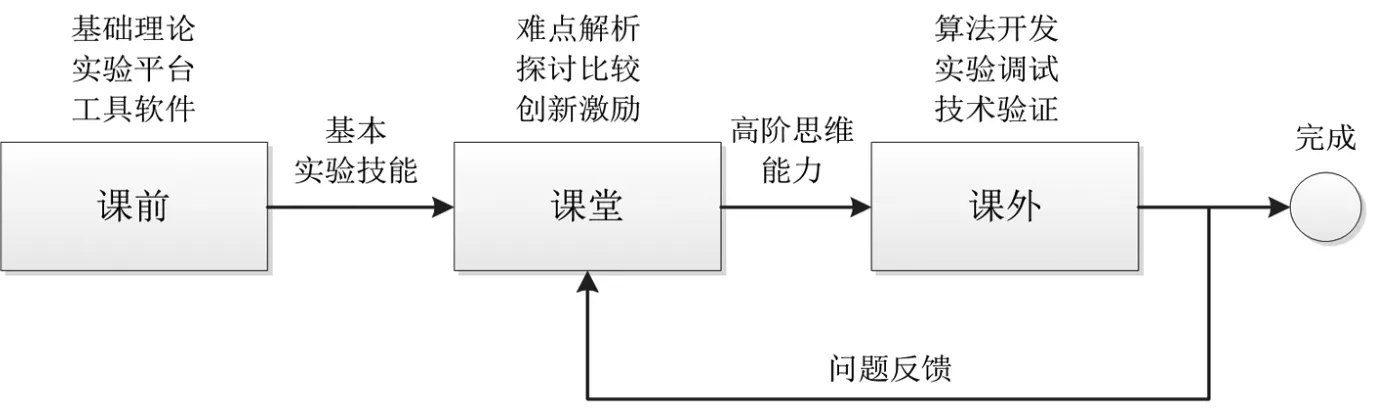
图2 面向高阶思维培养的翻转课堂闭环实践教学过程
针对不同层次实验内容包含的知识维度,高阶思维教学活动参考布鲁姆(Bloom)教育目标二维分类法[14]开展。实验课程的能力培养目标见表1,对移动机器人实践课程内容进行了进阶式的教学任务设计,将移动机器人实践教学目标从传统的验证、重复设计性认知提升为基于高阶思维的迁移性、创新性认知。
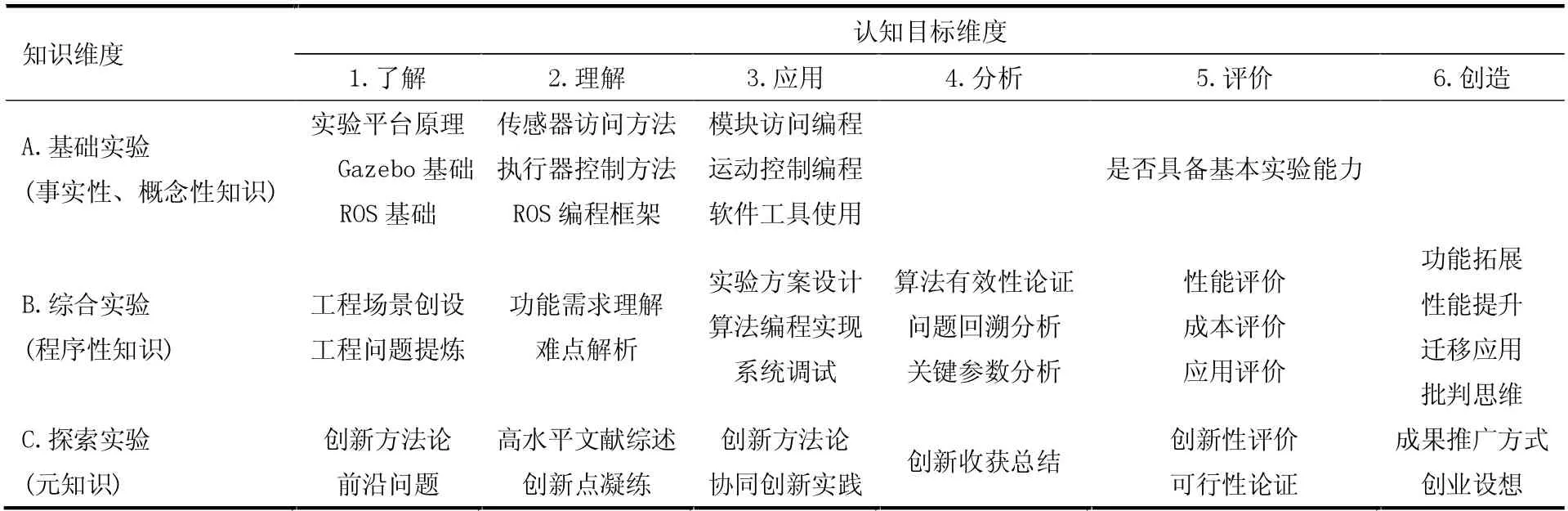
表1 融合项目驱动和高阶思维的实践课程教学目标
“基础实验”旨在基础知识巩固、验证以及训练基本实验技能,实验内容全部在课前完成,思维训练专注于“了解/记忆-理解-应用”等低阶思维。
“综合实验”的主要教学目标是让学生综合运用相关知识对移动机器人已较为成熟的关键技术进行复现和改进。采用项目驱动形式,分“创设-构思”“设计-综合”“评价-迁移”几个阶段开展,并融入高阶思维训练。
对于“探索实验”,其主要教学目标是引导学生尝试探索移动机器人的前沿技术点。首先通过课堂探讨,使学生了解移动机器人前沿问题;然后学生通过头脑风暴等开放式探讨获得创新设想并进行协同创新实践;最后,教师组织答辩对项目创新性、实用性进行评价,研讨成果推广方式和创业设想,使学生通过自主探索研究掌握创新创业方法论相关“元知识”。
二 移动机器人实践课程实施案例
以移动机器人无先验信息自主导航项目为例,展示“综合实验”的开展过程。
项目要求:①无先验全局地图;②机器人能够自主到达指定目标点。
“项目驱动式”实践教学过程如下。
本项目属于“综合实验”,按照“创设-构思”“设计-综合”“评价-迁移”分阶段开展。
“创设-构思”阶段。教师通过播放视频、组织参观等方式,让学生了解仓储机器人、AGV、扫地机器人等移动机器人典型应用场景;与学生研讨上述场景中机器人必须具备的核心功能,引出本项目的实践内容;引导学生分析复杂室内环境无先验信息条件下,移动机器人完成自主导航所需解决的关键技术问题,形成任务书。
“设计-综合”阶段。学生通过分析任务书,分组讨论获得项目实现方案。将项目实践内容分解为五个模块:激光雷达点云数据采集与处理模块实现环境中障碍物相对方位的探测;里程计数据采集模块实现根据里程计输出解算机器人当前的位置和姿态;局部路径规划及避障模块根据环境障碍物相对位置信息和机器人本体位姿信息利用相应算法实现局部路径规划以规避障碍物;路径跟踪模块根据机器人当前位姿利用相应算法实现使机器人趋向目标点的路径跟踪;机器人运动控制模块完成两轮差动机器人的运动控制。学生利用Matlab/Simulink 实现算法,并加载到实体或Gazebo 虚拟机器人验证算法有效性。
“评价-迁移”阶段。教师引导学生依据“性能评价—瓶颈调查—确定真因—改进方案—效果验证”等高阶思维方法进行循序、启发式创新活动。
具体到本实施案例,有学生小组采用动态窗口法(DWA)实现即时避障。在性能测试过程中,发现在障碍物离导航的目的地很近,且障碍物对目标形成遮挡时,算法容易出现死锁(图3(a)所示)。

图3 机器人运行轨迹
针对上述问题,教师指导学生首先回顾其使用的DWA 算法的核心思想。DWA 是在速度空间中采样多组速度矢量(线速度和角速度(v,ω))并模拟推算机器人下一定时间内的轨迹,经过碰撞检测去掉可能引起碰撞的轨迹,然后基于一个评价函数(如式(1)所示)对可行轨迹进行评价,选取最优轨迹(J(v,ω)最大)对应的速度驱动机器人运动。
式中:θ(v,ω)表示目标视线角(机器人朝向目标时为0,背向目标时为π),Dmin(v,ω)表示机器人当前轨迹与障碍物的最小距离,α,β∈[0,1]为固定权值。
通过分析式(1)所示的评价函数,学生发现,当目标点被障碍物近距离遮挡时,基于视线角和障碍物距离按照固定权值计算评价函数会周期性地得出相反的航向决策,表现轨迹评价函数大幅波动,造成机器人陷入死锁圆周运动。即:机器人发生死锁的原因为评价函数的固定权值造成的决策矛盾。
确定原因之后,得出解决这一问题的基本思路是将轨迹评价函数中的固定权值改进为自适应可调权值。学生开展头脑风暴讨论具体改进方案,包括权值调整的触发条件、调整范围、调整算法等。最终学生基于反馈控制思想,设计如式(2)所示的评价函数权值调整策略
其中,Dmin与式(1)中的意义相同,Ds表示避障阈值。
当机器人离障碍物很近时(Dmin≤Ds),动态降低评价函数中的目标朝向权重,同时增大避障权重,即离障碍物很近时机器人的航向决策以避障为主,离障碍物较远时(Dmin>Ds),恢复评价函数固定权值,机器人优先朝向目标运动,兼顾避障,解决了问题(图3(b)所示)。
三 结束语
机器人实践教学是落实《中国教育现代化2035》、新工科等教育战略规划的重要阵地。本文提出的移动机器人实践课程层次化课程体系设计、虚实结合的实验平台应用以及面向创新的“项目驱动式”高阶思维实践教学法符合学生认知规律,使之能够自主、循序地学习相关知识并通过团队合作完成实验项目。教学实践表明,上述教学改革内容在调动学生的学习积极性,培养自主学习能力,提高实践能力,激发创新思维等方面都取得了较好的效果。
