环月-地面激光通信链路运动特性分析与设计
2023-11-18李晓亮刘荣科刘向南周杨赵卓
李晓亮,刘荣科,刘向南,周杨,赵卓
1.北京航空航天大学 电子信息工程学院,北京 100191 2.北京遥测技术研究所,北京 100094
1 引言
随着航天技术与空间科学的飞速发展,深空探测已成为人类航天活动的重要方向[1]。深空探测任务多样化发展的同时对深空航天器通信系统提出了高速化、轻量化和小型化的应用需求。激光通信具有通信速率高、方向性强以及终端体积小、重量轻、功耗低等特点,可满足未来深空探测活动对高速率通信、超远距离传输、星际互联组网应用等需求,在未来的深空探测领域具有很好的应用前景[2-4]。
深空激光通信链路面临信号空间衰减大、强背景光干扰、大气影响严重等问题,使得其技术难度和经费投入均比近地卫星激光通信要大得多[2]。得益于良好的空间激光通信技术研究基础,美国在2013年率先开展了月地激光通信在轨演示验证(lunar laser communication demonstration,LLCD),采用测距通信一体化设计,实现了环月飞行终端与地面站相距40万千米的激光通信,其下行通信速率达622Mbit/s,上行通信速率为20Mbit/s,测距精度优于1cm[5-6]。LLCD验证了月地激光通信的可行性,充分展示了深空激光通信的优越性,为后续深空激光通信计划的实施提供了宝贵经验。LLCD在轨试验的成功也表明月地激光通信是迈向深空应用的第一步,促使各航天大国或组织对月地激光通信的研究再次进入了活跃期。美国未来将重点开展用于深空探测和行星探测的激光通信计划,欧空局也在计划实施深空激光通信试验项目。中国计划将在探月工程四期开展地月激光通信技术验证试验[1]。结合月地链路空间传输信道的特点,在未来的应用中,月地激光通信链路可能存在“月地直接信息传输链路”和基于“月面或环月轨道卫星-地球中继轨道卫星-地面站”的“月地中继信息传输链路”两种应用模式[2,4,7]。其中,环月飞行器-地面站激光通信链路是发展中国深空测控网激光通信系统可能的技术途径之一,相比于构建基于星间链路的射频/光学混合通信网络,其代价较小[1]。因此,对这种月地激光链路的研究具有十分重要的实际意义。
随着卫星激光通信技术的不断发展,国内外学者在近地轨道卫星星间激光通信链路轨道特性仿真、双向光束稳定跟踪约束条件分析以及星间无信标光捕跟瞄等方面开展了相关研究[8-14],并报道了月面对地直接信息传输激光链路的相关研究成果[15]。目前文献针对环月飞行终端-地面站激光通信链路运动特性的研究较少。本文针对环月飞行终端-地面站激光通信链路应用场景,仿真分析了环月飞行终端-地面站激光通信链路的主要运动特性及设计约束条件,并对月地直接信息传输下行链路进行了功率预算分析。
2 链路模型
环月飞行器-地面站激光通信链路主要由环月卫星激光终端和深空激光地面站组成,图1为环月飞行器-地面站激光通信链路示意。
为了便于分析环月飞行终端-地面站激光通信链路运动特性,给出了环月飞行器、地面站和太阳的几何关系,其中将地球地心记为O,环月飞行器记为P,激光地面站记为E,太阳记为S,月球月心记为M。
2.1 链路跟踪角度
研究地面站与环月飞行终端的几何关系,主要是求算地面站跟踪环月飞行终端的俯仰角和方位角等参数,以此为月地激光通信链路设计提供依据。如图2所示,可以算出激光地面站的俯仰角ε和方位角α。
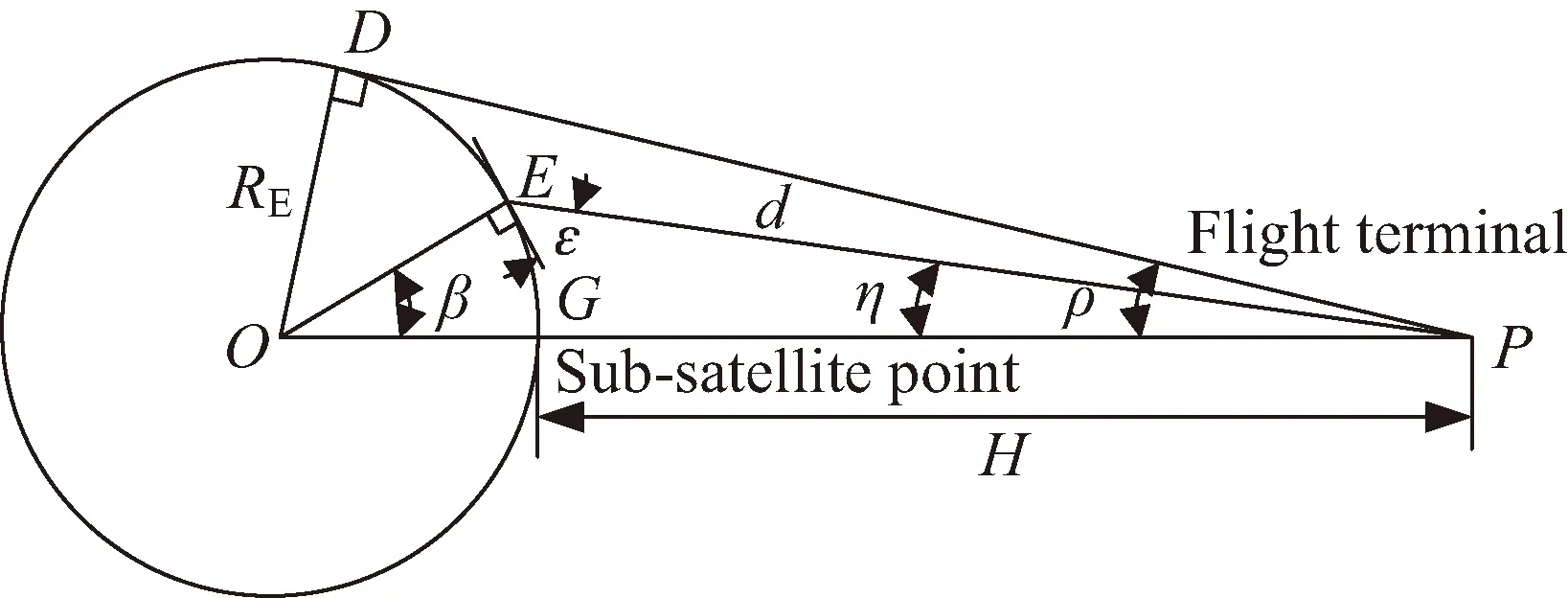
图2 环月飞行器与地面站的几何关系示意Fig.2 Schematic diagram of geometric relationship between circumlunar terminal and ground station
地面站到飞行终端之间的俯仰角ε和方位角α满足如下公式:
(1)
式中:β为飞行器星下覆盖区对应地球的半中心角,满足
cosβ=cos (λE-λP)cosφPcosφE+
sinφPsinφE
(2)
tanα=

(3)
(4)
(5)
式中:(λE,φE)为地面站经纬度;(λP,φP)为飞行器的星下点经纬度;RE为地球半径;H为飞行器与地面的距离。
此外,由地面站与飞行终端之间带来的时间延迟和相对运动,将引起一定的视轴指向误差,因激光光束的束散角非常窄(几十微弧度),需要对此视轴指向误差进行补偿和修正,以降低激光波束的能量损失。
由延迟时间引起的提前指向角φ表达式为:

(6)
式中:△v为环月飞行终端与地面站的相对运动线速率差;c为光速。
2.2 链路可见性
环月飞行器在绕月运动的过程中,其与激光地面站的通信视轴将会受到地球和月球的遮挡的影响,导致通信中断。因此,在链路设计时需分析因视轴遮挡引起的通信中断问题,评估通信链路的可见性。
如图3所示,当在t1时刻,若飞行终端与地面站的通信视轴刚好进入月球遮挡区域,此时满足如下边界条件:
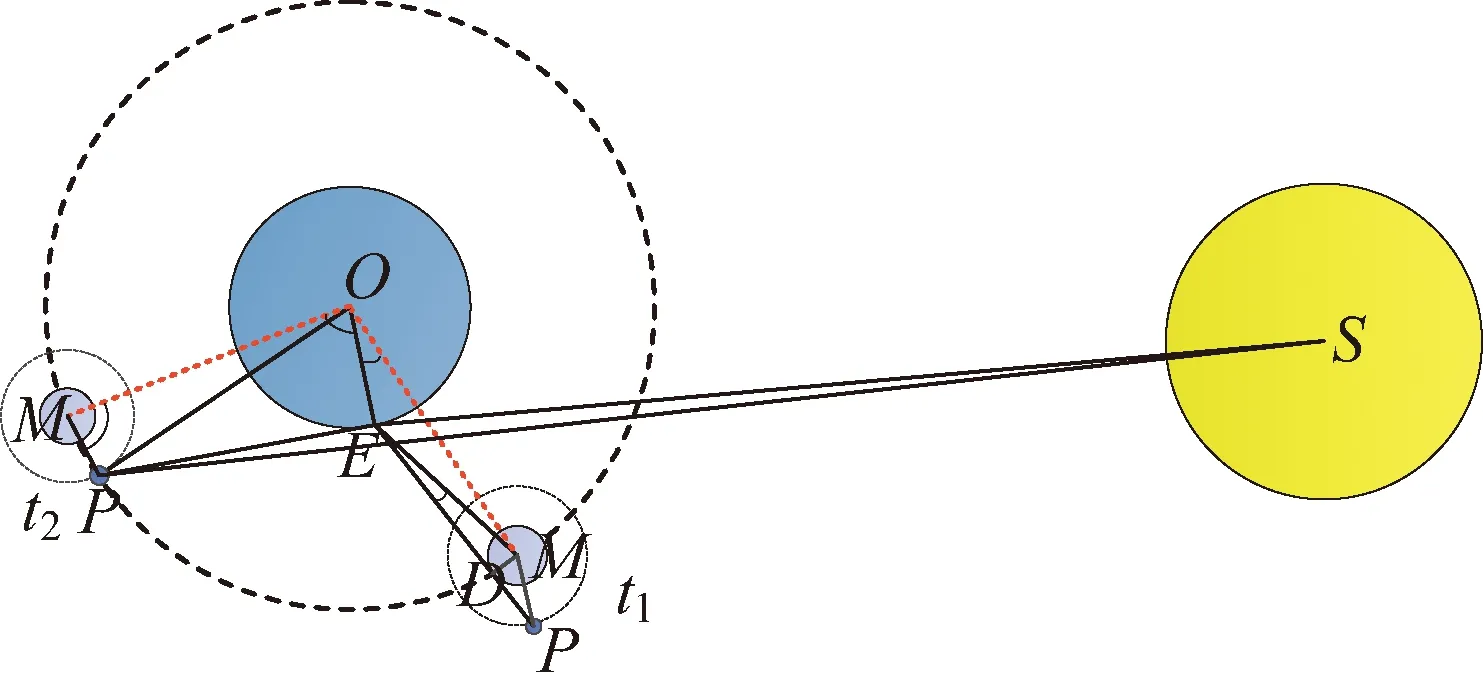
图3 环月飞行器、地面站和太阳的几何关系示意Fig.3 Schematic diagram of geometric relationship of circumlunar terminal,the ground station and the sun
(7)
MD·ED=0
(8)
当在t2时刻,若飞行终端与地面站的通信视轴刚好进入地球遮挡区域,此时满足如下边界条件:
(9)
2.3 太阳光干扰
对于月地激光通信链路,当遭遇日凌或通信两端的视轴与太阳光的夹角过小时,太阳光将引起探测器饱和或者信噪比急剧下降,导致链路无法建链和通信。因此,必须考虑太阳对激光链路的干扰情况。
如图3所示,当在t2时刻,若太阳-飞行终端-地面站三者的连线SPE(sun-probe-earth)角或SEP(sun-earth-probe)角小于激光终端半个接收视场,此时激光通信链路将出现日凌现象,无法进行激光通信。此时太阳对激光通信终端造成影响的充要条件为:

(10)
式中:FOVE和FOVP分别对应地面站和飞行终端的接收视场。
2.4 链路多普勒频移
激光通信链路多普勒频移的大小及变化特性是影响激光通信体制选取的关键因素之一。因此,对于环月飞行器相对于地面站的多普勒频移fd满足如下关系:
(11)
式中:v∥为沿环月飞行终端与地面站激光传播方向上的相对运动速率(即径向相对速率分量);λ为激光载波波长;θ为飞行终端与地面站相对速度与光束传播方向的夹角。
3 轨道特性仿真分析
基于以上分析,结合中国深空探测发展特点,通过软件仿真,讨论了环月终端对地激光通信链路的运动特性。其中,环月飞行器的轨道参数参照嫦娥二号卫星轨道参数,环月卫星轨道为100km[16];深空激光地面站选取喀什、阿根廷站[1,17]。结合月球中继卫星轨道设计,对采用环月卫星-月球中继卫星-地面站的激光链路的运动特性也进行了仿真和对比分析。其中,月球中继轨道选择了双星共面椭圆星座[18]。
3.1 链路可见性
链路可见性是评估链路应用效能的重要因素之一。在地球、月球遮挡期内,月地激光通信链路将无法工作。因此,在链路总体设计之初,需重点评估链路的可见性。为此,对月地直接信息传输链路和月地中继信息传输链路两种场景的可见时间进行了对比分析。
表1给出了一个月内两种通信链路的可见性统计数据。由链路总可见时间可知,在一个月的时间内,相比于月地直接信息传输方案,采用双星共面椭圆星座的中继方案后,月地中继链路的可见时间分别提升了16.1%(喀什站)和18.6%(阿根廷站)。因此,仅从地球、月球遮挡影响来说,采用双星共面椭圆星座的月地中继信息传输链路的可见时间更长。而对于地面站,在直传和中继两种月地激光链路情况下,喀什站与环月飞行终端在月地直接信息传输链路和中继链路两种场景中的总可见时间与阿根廷站相比,分别延长了约4.5%和6.5%。
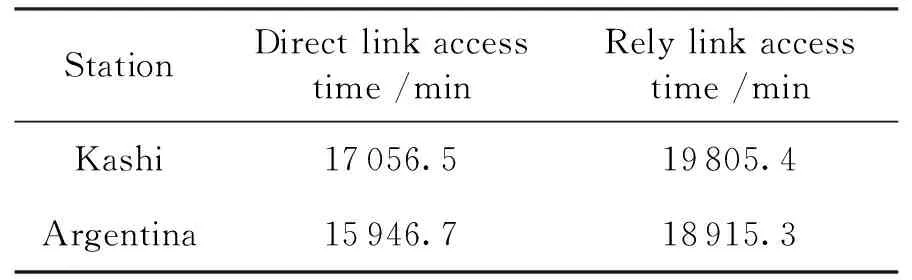
表1 一个月内环月-地面激光链路可通时间对比Table 1 Access time between the circumlunar terminal and the ground station in one month
图4给出了一个月内喀什站、阿根廷站分别与环月终端建立直传链路的可见时间弧段分布。因此,对于嫦娥二号飞行终端,选用喀什站更利于月地激光通信。
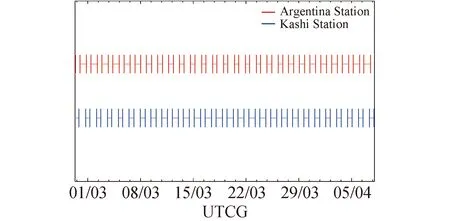
图4 喀什站、阿根廷站与环月终端直传链路可见时间Fig.4 Access time of laser terminal to Kashi and Argentina Stations
3.2 太阳光干扰
月地激光通信链路不仅会受到地球、月球遮挡中断外,还会受到日凌的影响,即当太阳、地球和飞行终端三者之间的角度SEP或SPE很小时,通信链路也有会发生中断。图5给出了一年内SEP和SPE角的变化曲线,由该曲线可知在统计时间内SEP角有50%的时间小于90°,意味着飞行终端将会长期受到地球日间天空背景光的干扰。同时,该环月终端对地链路的SEP或SEP角近似呈周期性变化,每隔约15天出现一次极小值;全年SEP角最小值0.031°出现在夏至日和冬至日,此时入射至接收视场内的太阳光强度将远高于激光信号强度,造成通信失效或者中断。若选择太阳规避角为3°,由仿真数据可知,一年内SEP角和SPE角均小于3°的时间占比为1%。太阳光的干扰将会减少月地链路的可用时间。因此,激光终端设计时需考虑日凌的规避措施以及抗日光干扰设计。
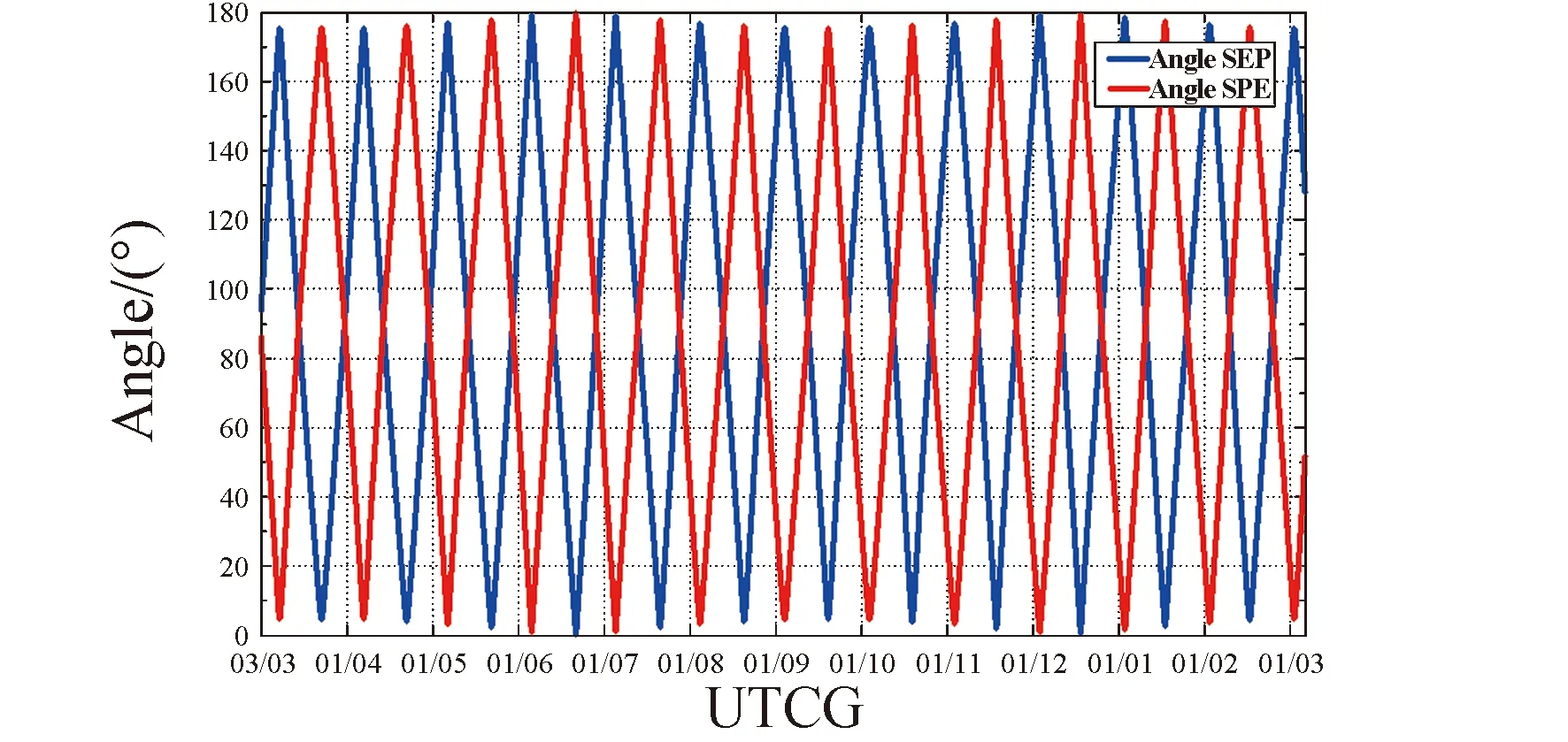
图5 月地激光链路SEP和SPE夹角变化曲线Fig.5 SEP and SPE angle of lunar to ground laser link
3.3 链路跟踪角度
月地激光链路在不同时刻所对应的跟踪角度是动态变化的,跟踪角度的大小将直接影响伺服转台的结构形式。因此,为了设计合理的伺服转台,在链路设计时需首先分析链路跟踪角度范围。通过对一个月内环月终端相对两个地面站链路运动数据的分析可知,环月终端相对两个深空站的跟踪角度范围相近。由表2的数据可知,环月终端视轴的方位角变化范围约为-180°~+180°,方位角速率变化范围约为-1~+1(°)/s,俯仰角变化范围为-19°~+89.7°,俯仰角速率变化范围为-0.05~+0.05(°)/s。图6给出了环月终端相对阿根廷站的跟踪角度变化曲线。
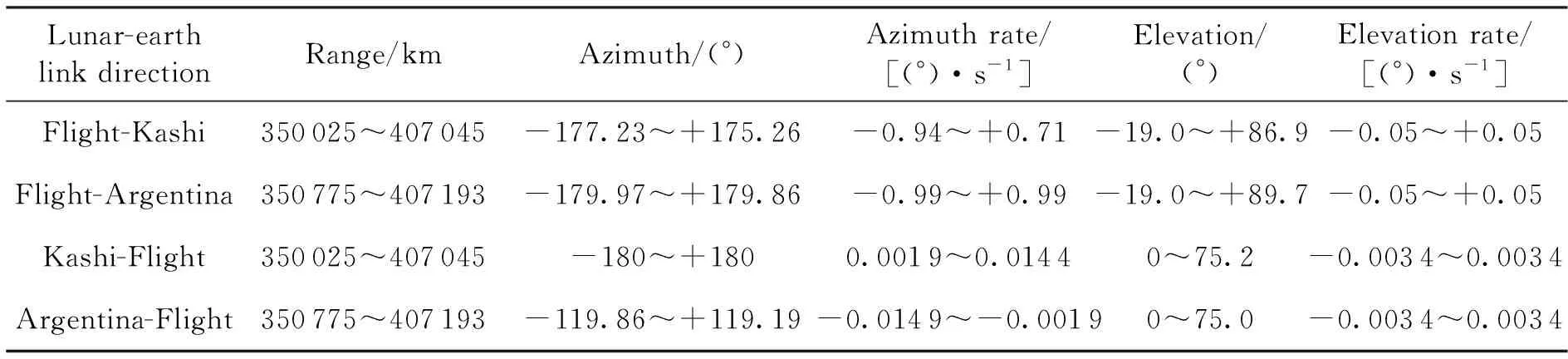
表2 链路距离及跟踪角度仿真数据Table 2 Simulation of link distances and tracking angle
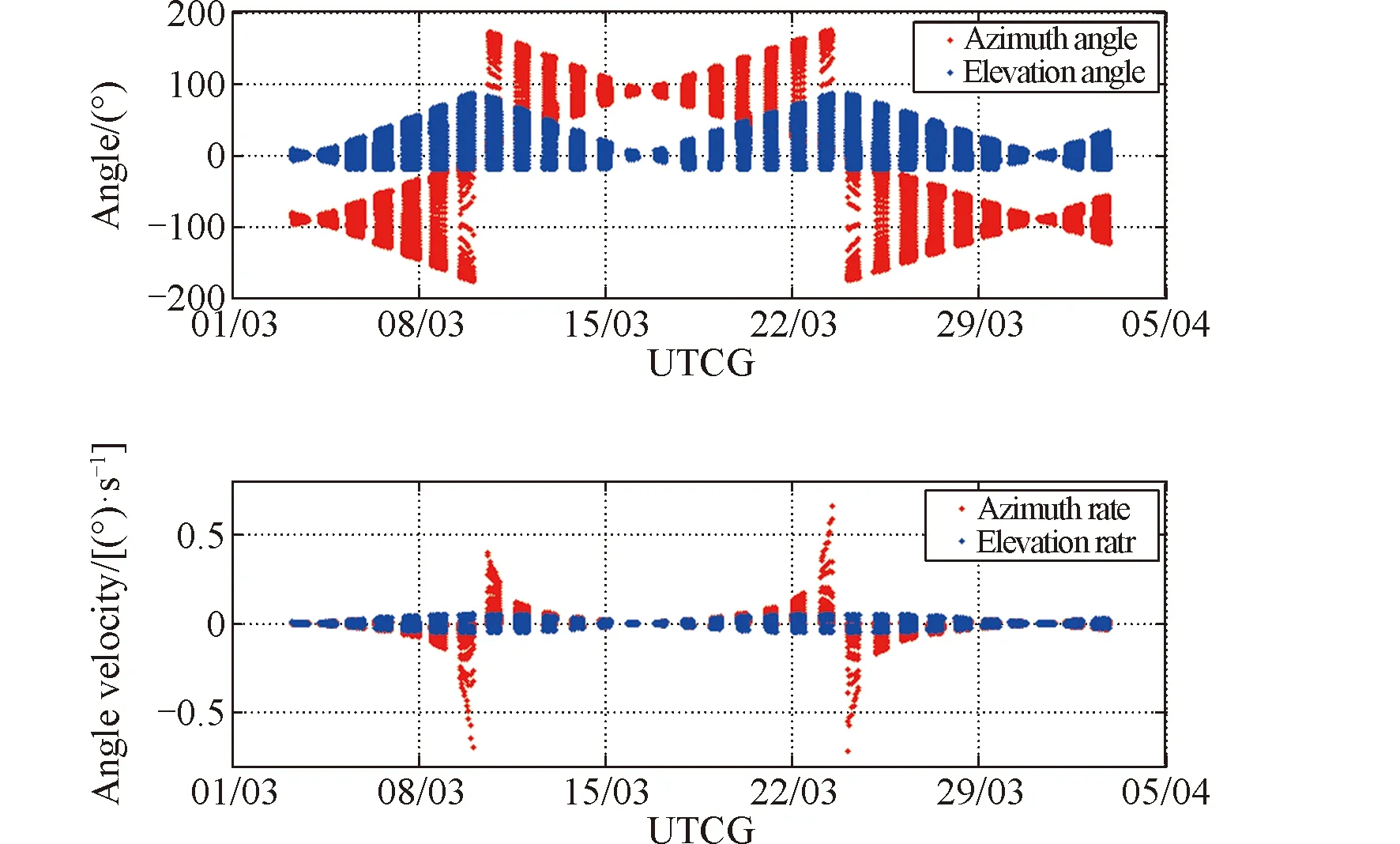
图6 环月终端相对喀什站链路跟踪角度变化曲线Fig.6 Tracking angle of link between circumlunar terminal and Kashi station
由表2可知,地面站视轴的方位角变化范围为-180°~+180°,方位角速率变化范围为-0.0149 ~+0.0019(°)/s,俯仰角变化范围为0°~+75.2°,俯仰角速率变化范围为-0.0034~ +0.0034(°)/s。图7给出了喀什地面站相对环月终端的跟踪角度变化曲线。

图7 喀什站相对环月终端链路跟踪角度变化曲线Fig.7 Tracking angle of link between Kashi station and circumlunar terminal
由前文分析可知,对于月地激光链路,还须考虑因相对运动和时间延迟引起的提前指向角,通过仿真及式(6)求解得到对月地直接信息传输链路和月地中继信息传输链路两种场景的提前指向角变化曲线。为统计提前指向角的周期变化,给出了环月卫星到喀什地面站链路一个半月内的提前指向角变化情况如图8所示,此时提前指向角的变化范围为0~18.2μrad。因此,须对月地激光链路进行指向角度的提前量补偿。
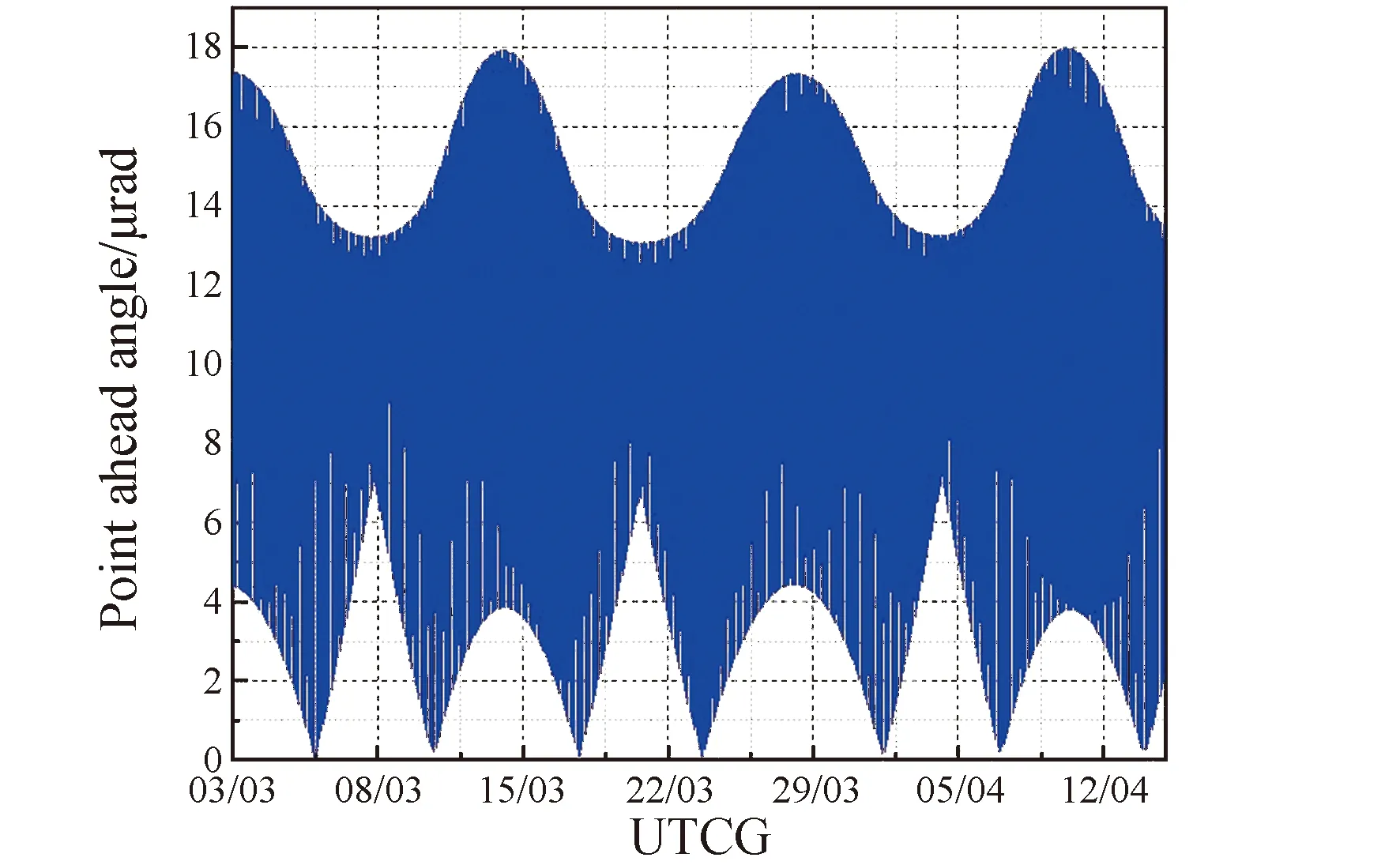
图8 环月终端相对喀什站链路提前指向角度变化曲线Fig.8 Point ahead angle of link between Kashi station and circumlunar terminal
3.4 链路多普勒频移
根据仿真结果可知,月地间的多普勒频移呈现近似周期的变化。图9给出了一个月内,环月飞行终端到地面站的激光多普勒频移变化曲线。可知,当激光波长为1550nm时,对应的多普勒频移量约为±1.28GHz,多普勒频移变化速率达1MHz/s。通过上述分析,在通信体制选取时需考虑上述多普勒频移的变化特性。

图9 环月飞行终端-地面站激光多普勒频移Fig.9 Doppler frequency shift between ground station and circumlunar terminal
4 月地激光通信链路设计建议
4.1 激光通信体制选取
通信体制的选取是开展月地激光通信链路设计的第一步。由国内外深空激光通信发展历程可知,空间激光通信体制主要有OOK调制/直接探测、PPM调制/直接探测两种非相干探测体制以及DPSK调制/自差接收、PSK调制/相干接收两种相干探测体制。其中,PPM调制/直接探测体制带宽利用率低,不利于高速率通信。但该体制信号光脉冲时隙占空比低,在平均激光功率受限的条件下,易于获取更高的脉冲峰值功率;同时,由于该体制可采用超导纳米线单光子探测器,因此可以实现单光子的接收灵敏度。上述两种因素使得该体制更适用于码速率要求不是太高,但链路距离遥远的月地及深空激光链路[19]。此外,对于本文分析的环月飞行终端到地面站的激光多普勒频移变化特性,采用PPM调制/直接探测体制可以适应±1.28GHz的多普勒频移量和1MHz/s的多普勒频移变化率。
综上分析,对于体积、重量和功率严格受限的月地及深空激光链路,其对高效率发射和高灵敏度接收的需求远高于其他因素。因此,综合对比各通信体制的技术复杂度、接收灵敏度及适用场景,PPM调制/单光子探测体制是当前月地及深空激光通信的首选。
4.2 月地激光通信链路功率预算
月地激光通信下行链路为高速通信。结合前文链路运动特性分析,对月地直接信息传输下行链路开展功率预算分析,月地激光通信链路方程满足如下关系:
式中:Pt为信号光发射功率;Pr为接收光功率;Gt为天线发射增益;Gr为天线接收增益;ηt为光学系统发射效率;ηr为光学系统接收效率;ηP为对准失配损耗;Lz为自由空间损耗;ηother为其他损耗,包括大气损耗和单光子探测阻塞损耗等;Dt为发射天线直径;Dr为接收天线直径;θ为离轴角度;θdiv为激光发散角;Z为通信链路距离。
根据表3所示的链路功率预算分析可知,若环月飞行终端采用1.55μm波段激光载波,当发射功率为4W,通信体制为16PPM,发射束散角40μrad时,深空激光地面站采用1.8m口径的接收天线和超导纳米线单光子探测器阵列接收,可实现月地410000km下行的622Mbit/s通信速率,对应链路功率余量为3.4dB。后续对超导纳米线单光子探测器的探测效率、解调损失等性能进行优化,可以进一步提升月地激光链路的通信速率,以满足未来月地激光通信链路的应用需求。
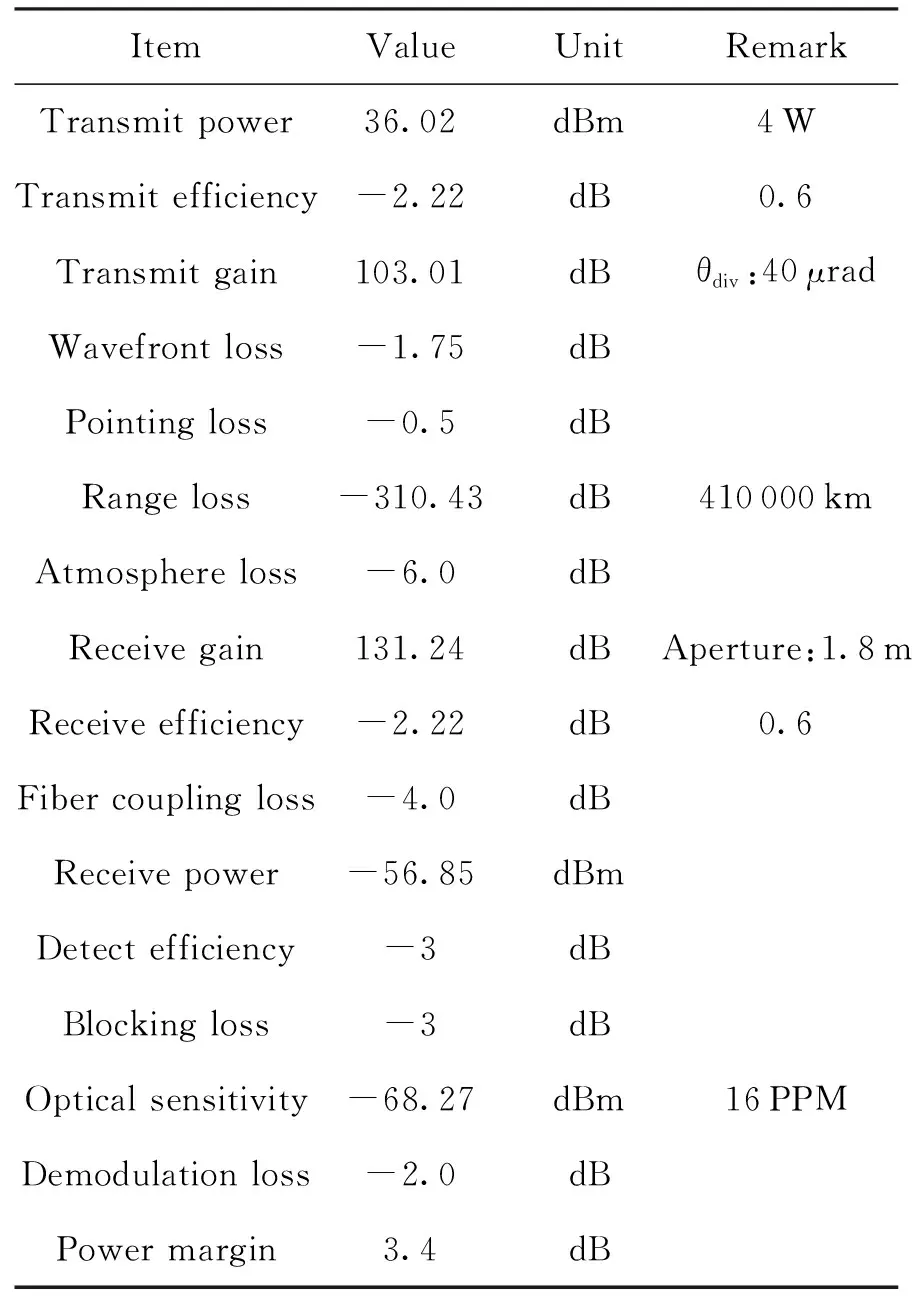
表3 月地直接信息传输下行链路功率预算Table 3 Power budget of lunar to ground laser link
5 结论
结合中国深空地面站的分布特点,依据月地激光通信链路的运动特性以及功率预算分析结果可知,若环月飞行终端采用1.55μm波段激光载波,当发射功率为4W,通信体制为16PPM,深空激光地面站采用1.8m的接收天线和超导纳米线单光子探测接收时,可以实现月地下行622Mbit/s通信速率。以上分析和设计可为中国月地激光通信系统的设计提供一定参考。
