变来流下翼型动态失速的协同射流控制数值模拟
2023-11-02贾天昊许和勇徐泽阳
贾天昊,高 超,许和勇,徐泽阳
(西北工业大学 翼型、叶栅空气动力学国家级重点实验室,西安 710072)
0 引言
动态失速是以形成动态失速涡(dynamic stall vortex,DSV)和发生大尺度流动分离为基本特征的复杂流动现象[1]。直升机旋翼在复杂的跨声速流场中进行周期变距运动,其后行桨叶在大攻角下易发生动态失速。动态失速发生时,气动力出现明显的非线性迟滞,出现升力损失、阻力突增和气动中心位置波动。研究翼型动态失速问题是提高其气动特性的关键途径之一。近年来,针对翼型俯仰振荡引起的动态失速开展了大量实验和数值模拟。McCroskey[2]选取多种翼型对定常来流下的动态失速问题开展了实验研究。Benton 等[3]通过大涡模拟方法研究了NACA0012翼型在高雷诺数下的动态失速问题。目前大部分的翼型动态失速研究都是在定常来流下开展,不符合前飞状态时旋翼的相对来流马赫数周期变化的特征。因此,基于变来流的翼型动态失速研究更能反映其真实的气动特性[4-5]。Hird 等[6]使用变来流跨声速风洞研究了SSC-A09 翼型在变来流下俯仰振荡的气动特性,发现随时间变化的来流速度对非定常气动载荷具有较大影响。
对于动态失速现象产生的不利影响,一般采用流动控制技术来改善翼型的气动性能。流动控制技术分为被动流动控制技术和主动流动控制技术。典型的被动流动控制技术有涡流发生器[7-8]、后缘襟翼[9]和格尼襟翼[10]等。这些控制装置能够有效地提高设计点的气动性能,但是难免会影响非设计点的气动性能。主动流动控制技术是通过向流场中注入能量以改善翼型的气动特性,例如边界层吸气可以抑制前缘分离泡[11-12]、等离子体激励器能够电离局部空气以加速边界层流动[13-15]、合成射流与合成双射流激励器可以产生涡流和等离子体射流作用于主流[16-18]。协同射流(co-flow jet,CFJ)是主动控制技术新发展的基于吹/吸气的控制方法[19-21]。CFJ 翼型的实验和数值模拟表明其具有较高的能量输出水平,能够显著地提高升力并减小阻力[22-23]。CFJ 的实验最初是依靠外部气源实现的,这种方法虽然方便但不符合工程应用的要求。Yang 和Zha 等[24]改进了内置气源的设计并进行了实验,不仅验证了该设计的有效性,还发现CFJ翼型具有高升力的特性和增强流动抗逆压梯度的特点。该技术基于内置气泵,具有零质量流的优势,加上控制效果显著,被认为具有较大的发展潜力。协同射流方法已被应用于翼型动态失速的控制中,但相关研究都是基于定常来流条件[25]。因此,在变来流条件下开展协同射流控制翼型动态失速的数值模拟研究,对于改善旋翼动态失速问题具有现实意义。
针对上述情况,本文开展了变来流下翼型动态失速的协同射流控制研究,建立了基于风扇(简称为FAN)边界的协同射流数值模拟方法,研究了变来流下翼型动态失速的气动特性,对比了CFJ 翼型的射流流道对原始翼型气动特性的影响,评估了协同射流方法的控制效率,分析了不同参数对CFJ 控制翼型动态失速的影响及控制机理。
1 计算方法
1.1 CFJ 翼型设计
选择NACA0012 翼型为基准翼型,并在此基础上进行外形修改,得到的协同射流翼型命名为CFJ0012。协同射流方法工作原理如图1 所示。
翼型弦长为c,吹气口距离前缘8.3%c、高度为0.91%c,吸气口距离前缘83.3%c、高度为1.94%c。为了使射流更好地附着于翼型表面,在吹/吸气口之间将翼型上表面设计了0.6%c的微量下沉,形成了上表面的射流流道。此外,使用无厚度的FAN 边界模拟协同射流时,翼型内部具有气流通道的设计。FAN 边界是用于模拟内置气泵,高度为4%c。该边界条件能使气流获得设定的压升ΔP以形成CFJ,使之更贴合实际的工程应用。协同射流开启时,内置气泵输送气流,从前缘吹气口将加速后的气流吹出。射流与主流发生掺混作用,加快边界层的流动。在后缘吸气口处等质量流的空气被吸入,自动实现了零质量流条件。
1.2 数值模拟方法
数值模拟采用Fluent 软件,基于有限体积法,选择速度压力耦合算法。远场为Riemann 不变量的无反射边界条件,壁面为无滑移壁面边界条件。流场求解的控制方程为非定常雷诺平均Navier-Stokes 方程[26]。采用转捩SST 湍流模型,该湍流模型耦合了k-ωSST 湍流模型和 γ-Reθt转捩模型,可以对流场不同区域的流动特征进行正确预测。k-ωSST 模型既有k-ω模型预测边界层内层流动的优势,又有k-ε模型模拟自由剪切层流动的优势,还引入剪切应力输运方程以改善对逆压梯度流动的预测性能。Menter 等[27-28]研究发现,转捩SST 湍流模型预测跨声速流动的准确性较高,不仅能较好地预测逆压梯度流动,还能较好地预测流动分离区域。
计算网格采用O 型拓扑的结构网格,对翼型表面、射流流道和FAN 边界处的网格进行加密处理。翼型俯仰振荡时网格整体刚性运动,周期性旋转中心为0.25c处。翼型俯仰振荡可描述为简谐运动,其瞬时攻角表示为:
式中:α0为平均攻角;αm为振荡幅度;ω为翼型俯仰角频率。减缩频率k描述来流的非定常效应,k值与非定常特性正相关。减缩频率表示为:
假设翼型对应桨叶径向70.75%处的剖面,桨尖马赫数为0.4,基准马赫数为0.283。来流马赫数与桨尖马赫数之比为前进比μ,定常来流下μ=0,变来流下μ选为0.25。翼型相对来流马赫数[5]表示为:
其中φ为来流马赫数与瞬时攻角之间的相位差。直升机前飞状态下前行桨叶流速大而后行桨叶流速小,因此设定φ=180°以减小升力的不平衡。
不同ΔP形成不同强弱的射流。射流强弱程度可由射流动量系数衡量,其定义如下:
主动流动控制的能耗直接影响技术理论向工程应用的转化。气泵输送气流以克服总压损失,功率与质量流量和总压比相关。功率系数[21]的定义为:
式中:cp为定压比热容;T2为吸口总温;η为气泵的效率;P1为喷口总压;P2为吸口总压;γ为比热比。
2 计算方法验证
2.1 计算方法验证
选择转捩SST、k-ωSST、k-ω三种湍流模型对NACA0012 翼型俯仰运动进行数值模拟,与实验结果[29]的对比如图2 所示。实验模型的弦长为0.601 m,实验状态参数为:α0=14.91°,αm=9.88°,k=0.151,Ma=0.283,Re=3.45 × 106。网格单元数量为10 万,时间步长为0.13 ms。
如图2 所示,不同湍流模型的预测的气动力与实验值大致吻合,但在翼型下俯阶段差别较大。翼型处于深失速状态时,k-ω湍流模型的计算值与实验值存在较大的差距,对流动分离后的演化过程预测不准确。计算结果不合理的原因可能是k-ω湍流模型对自由来流中湍动能的变化过度敏感。转捩SST 湍流模型依靠 γ-Reθt模型对转捩过程的正确捕捉,相比k-ωSST 湍流模型更接近实验值。转捩SST 湍流模型对该流动趋势预测的准确性表明,本文基于转捩SST湍流模型计算得到气动力结果是可靠的,开展数值模拟研究是可行的。
为验证计算方法在变来流条件下开展数值模拟的有效性,选择王清等[5]的计算结果与SSC-A09 翼型的实验结果进行对比,如图3 所示。数值模拟的状态参数为:来流马赫数Ma=0.4+0.08cos(ωt-13.3),瞬时攻角α=8.5 -13cos(ωt),减缩频率为0.05。图3中升力系数的变化趋势与王清等[5]的计算结果显示出较好的一致性,但在大攻角下计算值与实验值存在一定的偏差。在实验中变来流风洞的气流速度难以精准控制,会导致来流速度的波形发生畸变[5],还会导致气流的湍流度增大。而数值模拟中来流速度的变化规律受到准确的控制,因此可能导致计算值与实验值存在偏差。但气动力变化趋势基本吻合,表明了计算方法具有可靠性与有效性。
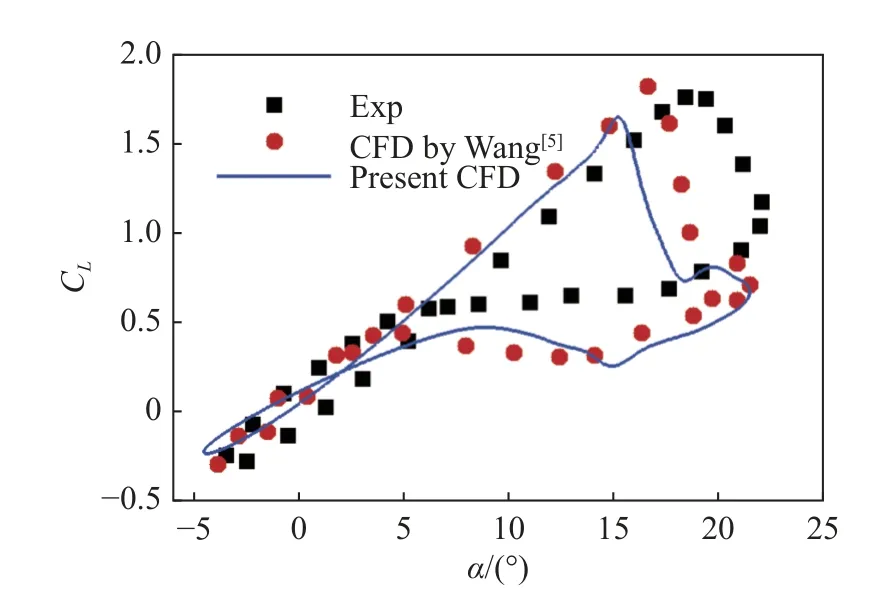
图3 变来流下翼型升力系数曲线对比Fig.3 Comparison of airfoil lift coefficient curves under variable free stream
2.2 CFJ 验证
本小节采用具有实验结果的CFJ6415 翼型进行CFJ 数值模拟方法验证。DANO 等[30]在NACA6415翼型的基础上设计了CFJ6415 翼型,并进行了实验验证。实验模型的弦长30.48 mm,展长59.06 mm。实验状态参数为:来流马赫数0.03,温度288.15 K,标准大气压力101.325 kPa,质量流率0.06 kg/s。实验的协同射流系统由独立控制的高压气源和低压真空气罐组成。为验证FAN 边界在CFJ 数值模拟中的可靠性与准确性,本文在相同状态参数下开展了数值模拟。计算结果与实验值的对比如图4 所示,15°攻角下的流场如图5 所示。可见,计算值与实验值的升力系数具有较好的一致性。攻角大于15°时计算的阻力系数偏低,功率系数略低于实验值,但变化趋势与实验值吻合。结果表明,基于FAN 边界的数值模拟方法能够较好地模拟CFJ 翼型的气动特性,为CFJ 的流场研究提供了较为可靠的方法。
3 结果与分析
本节基于以上CFJ 模拟方法,对CFJ0012 翼型在变来流条件下的俯仰运动绕流进行数值模拟,研究射流流道的影响,评估射流功耗特性,分析CFJ 控制动态失速效果以及流动机理。
3.1 CFJ 翼型射流流道的影响
气泵关机时的ΔP设置为0,该状态下的翼型命名为CFJ-off。选取μ=0 和μ=0.25,对CFJ-off 翼型开展数值模拟,并与基准翼型对比。不同方位角ψ下的气动系数如图6 所示。选取气流再附着过程中的ψ=30°、基准翼型的失速时刻ψ=243°和ψ=285°的流场进行分析,流线和速度分布如图7 所示。
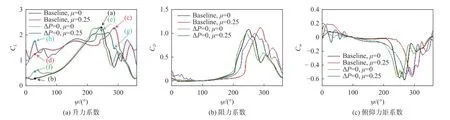
图6 Baseline 翼型和CFJ-off 翼型的气动力系数对比Fig.6 Comparison of the aerodynamic coefficients between the baseline airfoil and the CFJ-off airfoil
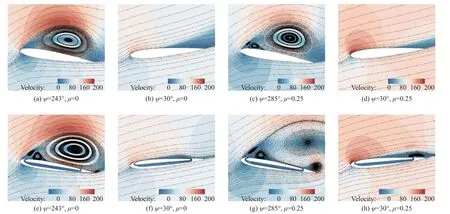
图7 Baseline 翼型和CFJ-off 翼型的流场对比Fig.7 Comparison of the flow fields between the baseline airfoil and the CFJ-off airfoil
从图6 中可以看出,CFJ-off 翼型在140°~240°方位角的升力系数更大,表明射流流道在翼型上仰阶段能够提高升力,但同时也增大了阻力和负俯仰力矩。图7(e,g)表明,CFJ-off 翼型在大攻角下,射流流道中形成了顺时针的反向气流,导致DSV 提前从上翼面脱落。在翼型下俯阶段气流逆时针流动自发形成了CFJ,导致μ=0.25 算例的升力系数曲线出现明显的振荡。图7(f,h)中,后缘吸气口出现的旋涡使气流难以再附着,导致气动力出现波动。CFJ-off 翼型的升力系数降低,阻力系数增加,动态失速提前发生。这表明射流流道因吹/吸气口的压力差而自发形成气流循环,导致翼型气动特性下降。在变来流条件下,射流流道对翼型气动性能的影响更加明显。
3.2 CFJ 控制效率的初步评估
为评估CFJ 的经济性,需要结合控制效果进行综合衡量以寻找最佳的平衡位置。在基准马赫数为0.283、减缩频率为0.151 的条件下开展了CFJ 控制翼型动态失速的数值模拟。翼型的俯仰运动规律依据式(1);相对来流马赫数的变化规律依据式(3);选取μ分别为0、0.15、0.20、0.25,ΔP分别为5~35 kPa 的共36 种情况进行研究。图8 为气泵单位功率的射流动量系数随ΔP的变化曲线,表示气泵单位功率产生的射流推力,体现了气泵的推力特性。射流的控制效率如图9所示,其定义是单位射流动量系数产生的升力增量。
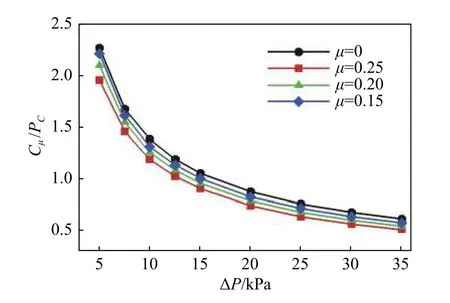
图8 气泵的推力特性Fig.8 Thrust characteristics of the pump
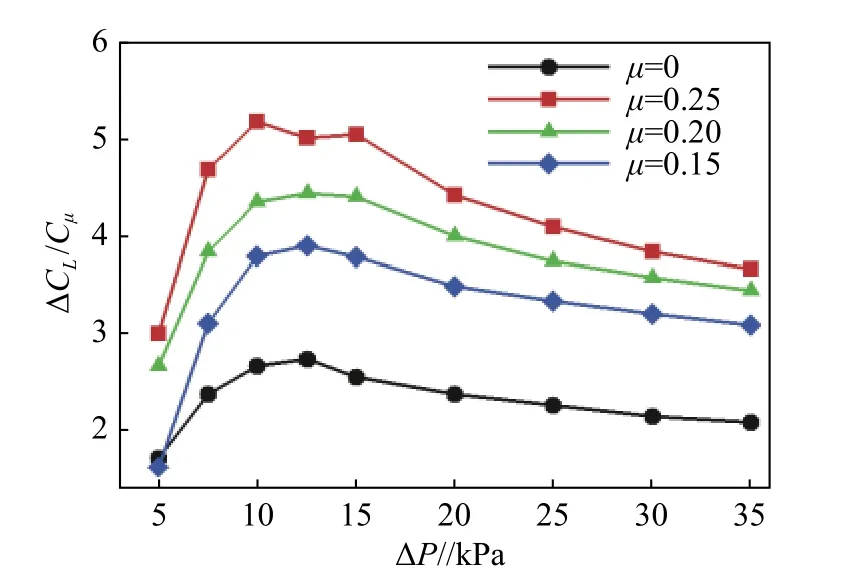
图9 射流的控制效率Fig.9 Control efficiency of the jet
推力特性在不同前进比下的变化趋势均为随ΔP增大而下降,下降趋势先快后缓,在相同功率下的射流推力越来越小。功率系数增加的速度快于Cμ,过高的ΔP将导致CFJ 技术不具备较好的推力特性。控制效率曲线随ΔP先增后减,Cμ较小时流动控制效果较差。当μ较大时,相同的Cμ能提供更多的升力增量,表明CFJ 在变来流下对改善翼型气动特性的作用更大。CFJ 在马赫数0.283、减缩频率0.151 的条件下具有较好的控制效率,ΔP为10~15 kPa 是最佳工作区间。
3.3 变来流下动态失速的CFJ 控制
为深入研究CFJ 对翼型气动特性的影响,以及探索CFJ 控制动态失速的机理,选取μ=0.25,ΔP分别为5、12.5、25 kPa 的CFJ 算例与无流动控制的算例进行数值模拟,气动系数的对比如图10 所示。选取ψ分别为285°、312°、356°时的流场,翼型表面压力系数如图11 所示。采用流线、速度云图、湍动能云图和涡量云图进行分析,如图12~图14 所示。
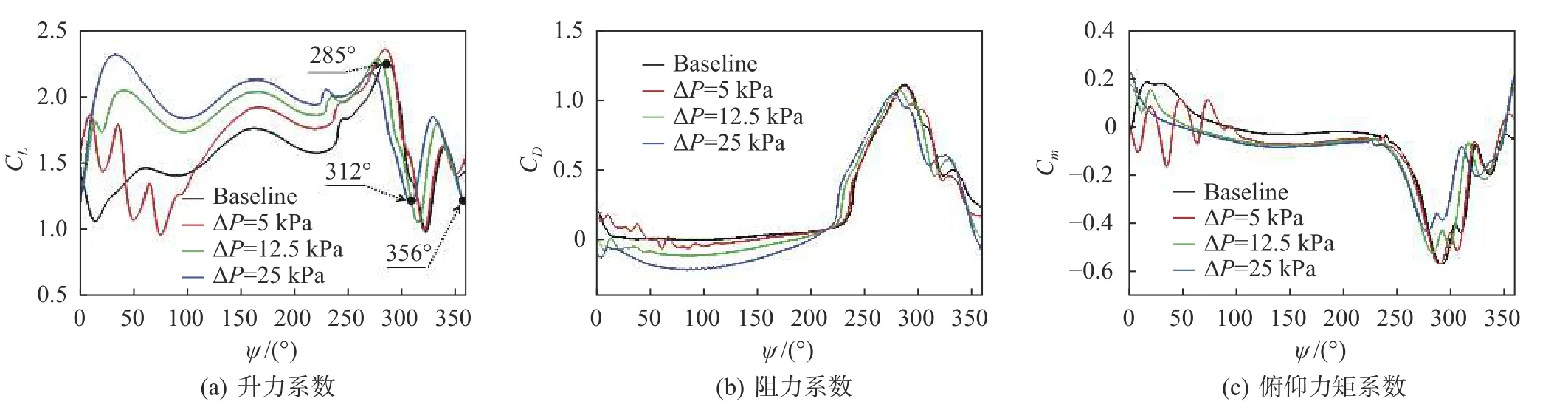
图10 不同压升下的气动力系数Fig.10 Aerodynamic coefficients at different pressure rises
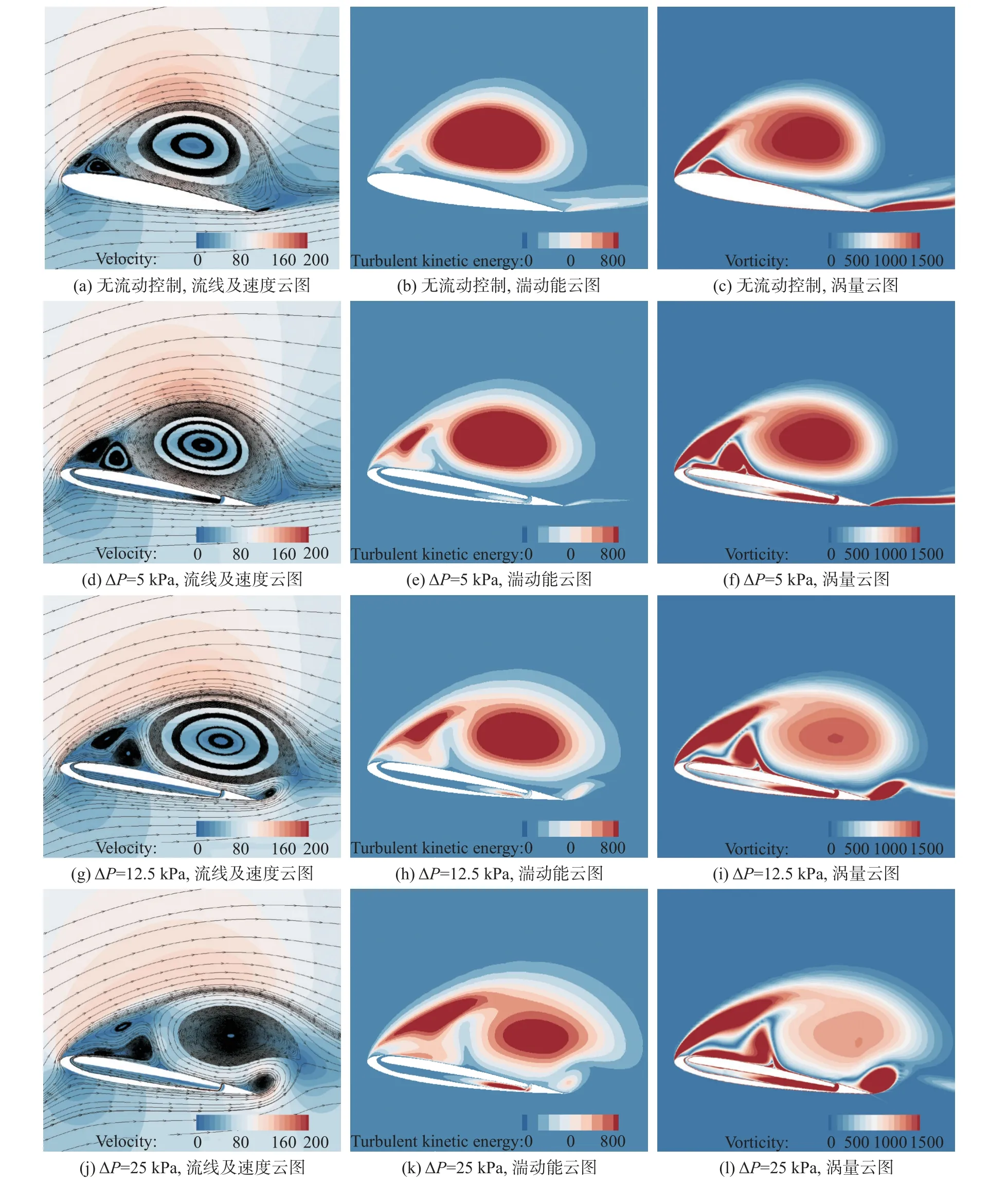
图12 285°方位角有控和无控的流场对比Fig.12 Comparison of the flow fields with and without the control at ψ=285°
CFJ 开启后三个算例的平均升力系数分别提高了5.5%、16.7%、22.2%,平均阻力系数分别下降了2.9%、19%、34.6%。这表明CFJ 在变来流下具有较好的增升减阻效果,并且较高的Cμ对动态失速的控制能力更强。图10(a)中,ΔP越大,升力系数曲线越早出现“凸起”。在270°到285°方位角之间,不同算例先后出现明显的动态失速特征。结合图11(a)可知,ΔP越大,翼型前缘的旋涡发展越充分,DSV 位置越靠近下游。结合Q-Criterion 准则确定DSV 涡核的大致范围,ΔP=5 kPa 算例在此处的涡量为1 703 s-1,高于无流动控制的1 680 s-1,其他两个算例的涡量分别为1 403 s-1和1 185 s-1。Cμ超过一定的阈值后,CFJ 能够削弱DSV 并使其提前脱落。无流动控制时,涡核处的湍动能约为1 765 m2/s2;开启CFJ 后,涡核处的湍动能随着ΔP增大逐渐下降,分别为1 572 m2/s2、1 189 m2/s2和955 m2/s2、
图12 表明,Cμ越大,射流的能量越高,翼型前缘的湍动能越大。射流与主流的掺混促进了此区域的动量交换,前缘的涡量供给被切断,加速了DSV 的耗散与破裂。因此,即使CFJ 有增升效果,翼型在失速前的升力峰值还是低于无流动控制的算例。Cμ越大,DSV 脱落的速度越快,ΔP=25 kPa 的CFJ 翼型因此最先脱离深失速状态。ΔP=5 kPa 时DSV 滞留在上翼面的时间更长,带来更大的升力增量,也加深了动态失速的程度。ψ=312°时,DSV 正在脱落中,翼型处于深失速状态。图11(b)中基准翼型和ΔP=5 kPa的算例在后缘出现较强的涡吸力,形成了较大的低头力矩。ΔP=12.5 kPa 时尾缘涡的吸力已经大幅下降,ΔP=25 kPa 时后缘基本不受影响。CFJ 翼型相比于基准翼型,负俯仰力矩峰值分别降低了0.3%、9.2%、24.6%。合适的Cμ能够降低负俯仰力矩的峰值,保持俯仰力矩相对稳定。当Cμ较小时反而增加了俯仰力矩的波动,对翼型气动力的稳定性造成不利影响。
ψ=285°时湍动能与涡量基本相对应,而ψ=312°时湍动能与涡量呈现相反的分布。图13 中湍动能主要集中于翼型的中后部,在DSV 破裂后该区域内出现大量的动量交换。ψ=312°时,涡量较强的位置是在前缘和尾缘。图13(f)中,ΔP=5 kPa 算例的尾缘涡在该方位角下快速增强,涡核区域的涡量高达4 258 s-1。射流使DSV 提前脱落,但却增强了尾缘涡,限制了流动控制的效果。图13(k)中湍动能的高能区域相比其他情况明显缩减,表明深失速状态下CFJ 降低了翼型上方湍流的脉动,加快了流场演化的速度。
CFJ 翼型在ΔP=12.5 kPa 和ΔP=25 kPa 下的动态特性都有明显改善,翼型气动力变化趋势在DSV生成前基本一致。ΔP=5 kPa 的气动力在动态失速后振荡下降,气流难以再附着。由图14 可知,ψ=356°时出现流动分离,射流流道上方形成了旋涡,导致边界层无法完全附着,分离区域随着旋涡生成和脱落而反复振荡,由于缺乏射流控制,气流没有足够的动量,分离流难以转变为附着流,基准翼型出现了大尺度流动分离,湍动能的高能区域出现在远离上翼面的地方。当ΔP=12.5 kPa 时,上翼面的湍动能明显下降,流动分离受到了有效抑制。当ΔP=25 kPa 时,上翼面基本没有湍动能的高能区域,流线与上翼面平行,分离流完全转变为了附着流。这表明增大Cμ能使射流保持附壁,并降低湍动能,改善翼型在动态失速发生时的气动特性。
在变来流下CFJ 通过增加弦向气流的动能以增强与主流的掺混,提高气流克服逆压梯度的能力以抑制流动分离,加快了流动再附着。在0°~90°方位角下,ΔP=12.5 kPa 的气流比ΔP=5 kPa 的附着状态更加稳定。当Cμ较小时,CFJ 主动控制的效果较差,需要更长的时间使分离流再附着。更大的Cμ使流动再附着提前发生,ΔP=12.5 kPa 和ΔP=25 kPa 两个算例的流动再附着时刻相比于无流动控制的算例都有明显的提前。在变来流条件下,ΔP=12.5 kPa 比ΔP=5 kPa 具有更好的控制效果,比ΔP=25 kPa 控制效率更高。
4 结论
本文发展了变来流下翼型动态失速的协同射流控制方法及数值模拟方法。通过改变前进比μ和压升ΔP讨论了协同射流(CFJ)对翼型动态失速的影响,分析了CFJ 控制动态失速的机理,主要研究结论如下:
1)CFJ-off 翼型在ΔP=0 时,射流槽道中自发形成了气流循环,在翼型失速前和流动再附着两个阶段,对原始翼型的气动特性产生不利影响。在变来流下,射流流道对翼型气动性能的影响更加明显。
2)气泵推力特性随ΔP增大而降低,射流的控制效率随ΔP先增后减,10~15kPa 是最佳工作区间。CFJ 翼型在该区间内相对于ΔP=5 kPa 具有较好的气动性能,相对于ΔP=25 kPa 具有更优的控制效率。
3)变来流下开启CFJ 进行主动控制时,能够有效改善翼型的气动特性。CFJ 通过与主流进行掺混抑制了动态失速,加快了涡系演化的进程,通过增加弦向气流的动能,使气流克服逆压梯度的能力增强,从而抑制了流动分离,促进了流动再附着。在μ=0.25、ΔP=25 kPa 的算例中,平均升力系数上升了22.2%,平均阻力系数下降了34.6%,负俯仰力矩峰下降了24.6%。
4)CFJ 技术的控制性能表明,CFJ 在变来流条件下对改善翼型动态特性具有较大的潜力。在本文的研究条件下,CFJ 具有较好的控制效率。研究结论可为该技术的工程应用提供一定的理论支持。