管片拼装机旋转精准操控技术研究
2023-10-31李太运
李太运,赵 石
(中铁工程装备集团有限公司,河南 郑州 450000)
目前,随着全球社会经济的快速发展,大都市内部、城市群、地区中心城市也逐步相互联通。盾构是隧道机械化的施工装备,其施工在自动化作业、环境保护、地表沉降控制、效率和安全性等方面有着独特的优越性,同时也是“中国制造2025”这一计划中着重于高端智能化设备。
推盾机是隧道建设的重要工程机械,它的效率对工程进度有很大的影响。推盾机的拼装机是其核心元件,其稳定性、准确性、控制性是其性能指标的重要指标。由于管片拼装机自身的重量和管片的重量都很大,所以其旋转惯性是最主要的因素。管片拼装机液压系统对管片拼装机的运动特性起到了决定性的作用,从而影响到整个运动系统的动作特性,所以对管片拼装机液压系统的分析与设计一直是一个十分重要的课题。
1 拼装机的结构组成
推盾机管片拼装机是主要用来拼装衬砌管片的机械,其机械机构主要由液压驱动的环式结构、行走梁、平移机构、回转机构、举升机构、举重钳、管路支架、工作平台等组成,如图1 所示。管片拼装机主要实现功能有:管片的锁紧、升降、平移、回转、仰俯、横摇和偏转7 种动作,各种动作进行专门的调节以使管片能精确就位。本文以推盾机的管片拼装机构的旋转精准操控性为例进行研究,通过电液符合控制的研究,提升管片拼装机的旋转操控体验,为推盾机的管片拼装提供保证。

图1 推盾机管片拼装机
2 拼装机旋转液压系统
推盾机管片拼装机的旋转机构是由旋转环形机构、齿轮、液压马达、比例多路阀、平衡阀等组成,通过拼装机遥控器控制液压比例多路阀驱动液压马达,从而带动管片拼装机的旋转机构进行旋转。旋转液压系统主要由球阀、单向阀、比例多路阀、平衡阀和液压马达等组成,如图2 所示。当管片拼装人员操作管片拼装遥控器的操作杆向PLC 发出旋转信号,PLC 输出0~10V 的信号驱动放大器,使放大器输出对应的电流信号,从而驱动管片拼装机旋转比例多路阀工作,进而带动液压马达驱动管片拼装机旋转。理论上管片拼装机的操作杆的操作角度与管片拼装机的旋转速度为线性关系,操作杆的角度越大,管片拼装机的旋转速度越快。
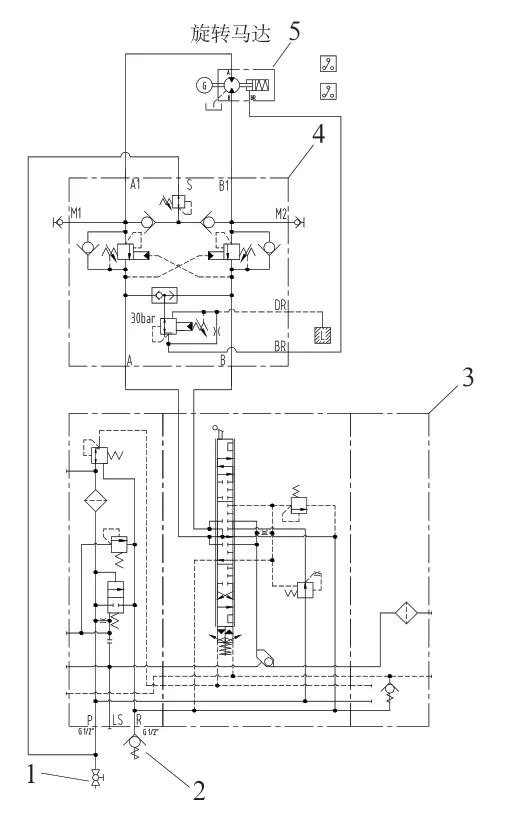
图2 旋转液压原理图
但在实际的工程应用过程中,由于液压比例多路阀和电气控制的特性往往不能达到使用者良好的操作体验感受,比如作为操作者希望管片拼装机在低速段的操作精度更加精准,这样便于管片的旋转微动;在高速段的加速较快一些,这样可以将管片快速旋转到位,如图3 所示。

图3 拼装机理想控制曲线
本项目采用国产某厂家的比例多路阀,其实现的控制曲线如图4 所示。在低转速时阀口的开度较大,低转速的操控性不强,操控分辨率低。在实际的操控中感觉拼装机的遥感稍微搬动,拼装机的速度变化很大,因此低速的操控难度较大,很难实现低速的精准操控。为解决拼装机低速操控体验感不强的问题,我们引入电控的控制曲线,用于弥补液压比例多路阀特性的不足。
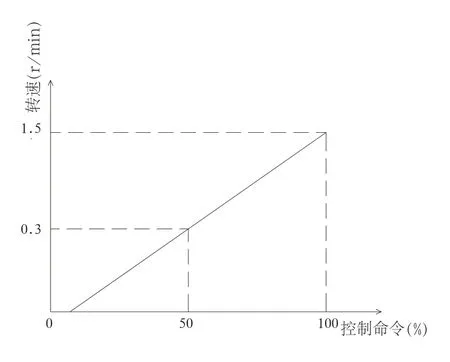
图4 拼装机实际控制曲线
3 电器控制
管片机旋转采用比例多路阀控制实现管片拼装机的无级调速。比例多路阀通过放大板电流驱动,放大板的输入信号采用±10V,接线方式如图5 所示。拼装机的旋转限位采用接近开关限位和旋转编码器限位双重保护,旋转限位角度为±200°,接近开关限位角度±205°。

图5 放大板控制流程
该放大器通过输入模拟信号进行控制,如果未探测到内部或外部错误,使能信号有效后放大器启动,READY 信号指示出模块就绪。通过不同的参数对内部集成的各标准功能组件进行配置。输出电流受内部控制,因此可获得极高的精度和良好的动态特性。该放大器还具备CC 线性化特性函数,通过该参数可以自定义信号的线性化特性,线性化曲线是通过插值补偿算法Y=(x-x1)(y1-y0)/(x1-x0)+y1计算得到的。设置界面如图6 所示。
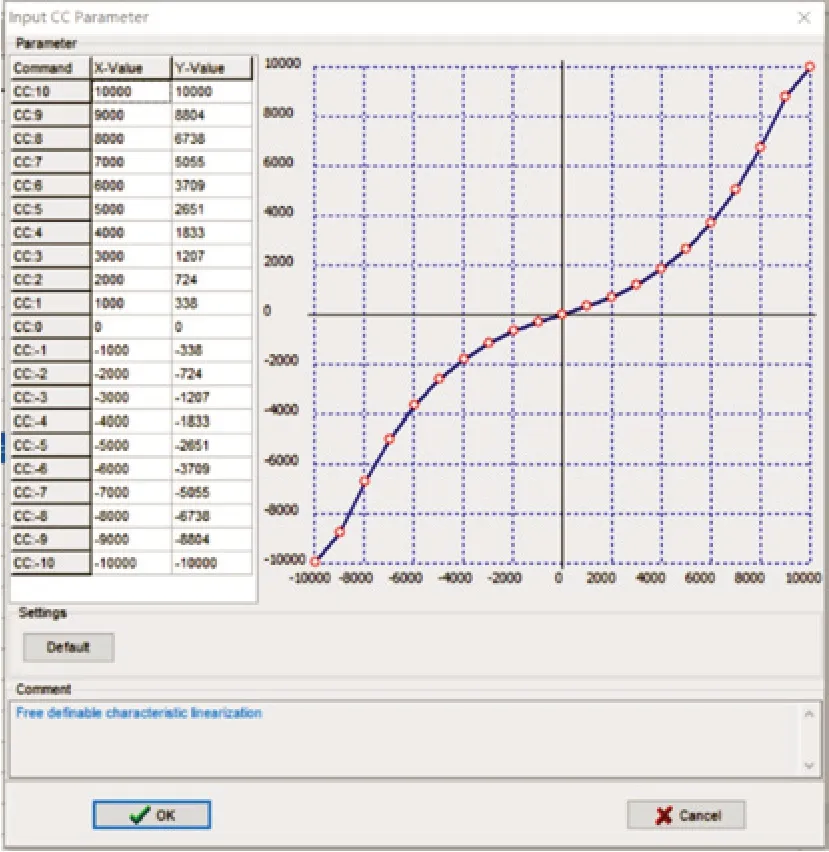
图6 线性化特性函数设置界面
4 控制参数优化
通过上述的电控放大器的功能,结合比例多路阀特性以及现场的管片操作手的使用体验,将特定的特性曲线嵌入到管片拼装机的旋转控制系统中,以改善管片拼装机的旋转操作体验,达到低速好操控,高速响应快的目的。根据现场实验得出如下数据的体验感最好,如表1 所示。

表1 线性化特性函数设置参数
根据现场数据,为方便后续产品使用该参数,通过函数拟合相似曲线,获得最佳的控制曲线和和函数,如图7 所示。
5 结论
本文通过电液耦合控制、实验验证和数据拟合等方法对管片拼装机的旋转控制进行优化和改善,提升管片拼装机的旋转操控体验感,实现了管片拼装机在低速段的操作精度更加精准,在高速段的响应迅速,大大提升管片拼装机的效率。并通过实验数据拟合最佳控制曲线,为拼装机的电液耦合控制提供一定的参考意义。