纯电动装载机整车控制策略及仿真研究
2023-10-31卢照昕景一佳郑中山
卢照昕,景一佳,郑中山,江 帅
(1.中铁工程装备集团有限公司,河南 郑州 450016;2.河南牧业经济学院,河南 郑州 450046)
1 纯电动装载机系统构成
目前市场上纯电动装载机的技术路线主要有2 种,一种是双电机驱动,电机一作为行驶驱动电机,电机二作为工作系统电机;另一种技术路线是三电机驱动,电机一和电机二作为行驶驱动电机,电机三作为工作系统电机。电机都采用永磁电机或开关磁阻电机,因各方案的侧重方向和实施对象不同,各有优缺点。本项目涉及纯电动装载机整车控制策略及仿真应用,选择具有较广泛适用度的双电机驱动方案(图1)。
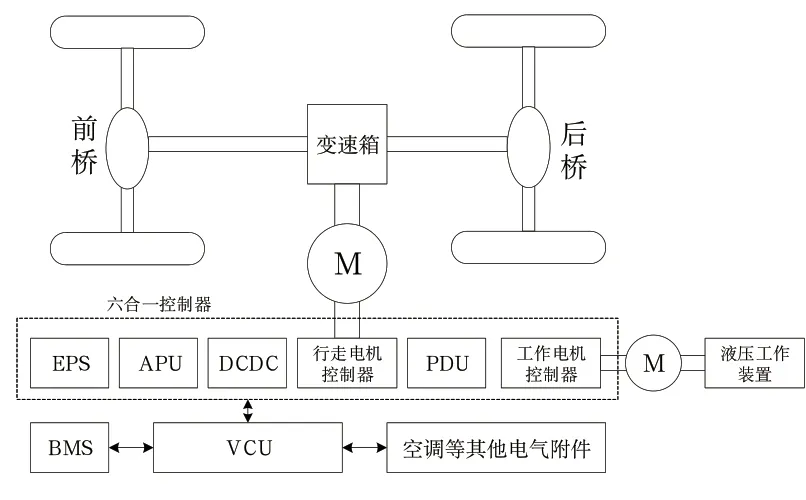
图1 双电机驱动技术路线动力构型图
2 纯电动装载机系统构成
纯电动装载机与内燃机装载机相比,力学过程本质上相同,区别在于采用不同的动力源。根据某厂家内燃机6t 装载机动力系统性能参数确定纯电动装载机整车动力匹配参数、电源系统和电子电气架构。
2.1 电机匹配
装载机工作时电动机消耗主要体现在行走和液压工作所需功率,行走电机所需功率按照装载机满载工作时额定驱动力Ft所需额定功率Pe和峰值功率Pm确定,即
式中:Ft为驱动力;Ff为滚动阻力;Fw为空气阻力;Fi为坡度阻力;Fj为加速阻力。
根据满载时的最高车速(40km/h)和持续爬坡度(30°)计算整车所需的额定功率Pe,即
式中:G为满载装载机重量,N;f为滚动阻力系数,N/kN;um为最高车速,km/h;CD为空气阻力系数;A为迎风面积,m2;θ为持续爬坡度;uic为持续爬坡时的车速,km/h。
装载机行走电机的额定功率Pe取Pve和Pie的最大值。
装载机行走电机的转速匹配和扭矩匹配根据式(4)和式(5)计算
式中:r为车轮半径,m;nm为电机峰值转速,r/min;Tmax为最大扭矩,Nm;Pmax为最大功率,kW。
纯电动装载机液压工作电机功率
式中:PA为工作液压泵的输出压力,MPa;Q为工作液压泵的流量,L/min;ϑb为工作液压泵效率。
根据上述理论可计算出纯电动6t 装载机的行走电机和工作电机参数如表1 所示。

表1 纯电动装载机6t装载机动力参数
2.2 动力电池匹配
动力蓄电池包的电量是影响纯电动装载机工作时间的决定性因素,按照续航时间5h,充电时间1h 的工况要求计算动力蓄电池匹配参数。
电池容量C(单位Ah)可根据式(7)计算
式中:P为工作电机和行走电机的总功率;t为单次可持续工作时间;U为电池的额定电压。
根据装载机工况的不同,电池的峰值功率为
综上所示,本项目纯电动装载机电压平台579.6V,电池电量351kWh。
3 纯电动装载机整车模型搭建
3.1 整车控制策略研究
整车控制策略是纯电动工程机械的核心技术,其优劣直接影响整车的动力性、经济性等性能。本项目将6t 纯电动装载机的控制策略细分为上下电控制、换挡控制、加速踏板控制、动臂控制、翻斗控制等16 项控制功能,各策略如下。
1)上电控制策略 空挡并且4 个先导压力传感器压力值低于2bar 时才能启动。整车控制器(Vehicular Communication Unit,VCU)检测到ON 信号,各核心部件开始自检,若有故障,VCU将故障码、故障等级、故障节点转发至仪表显示,若无故障,VCU 发送上高压电指令给BMS,BMS 接收到指令后,自检无故障后闭合电池箱内继电器并反馈接触器状态,电池上高压完成。
2)下电控制策略 VCU 检测到ON 信号消失后,VCU 依次切断各个附件,VCU 接收到各执行单元停机状态后,发送接触器断开指令,整车完成下电。
3)加速踏板控制策略 VCU 检测到油门踏板信号,控制行走电机转速。当油门减小时,进行再生制动(滑行回馈)。
4)换挡控制策略 VCU 检测换挡手柄输出的24V+信号判断司机挡位需求。挂F 挡条件:静态时,在刹车被踩下时允许挂F 挡,否则变速箱不会进入挡位;换N 挡条件:任何条件下,R挡和F 挡与N 挡可以直接切换;换R 挡条件:静态时,在刹车被踩下时允许挂R 挡,否则变速箱不会进入挡位。
5)行车制动控制策略 刹车灯亮;反馈制动踏板踩下幅度信号,作为制动能量回收信息输入,控制能量回收程度;静态时,作为F 挡和R换挡的判断条件。
6)驻车制动控制策略 显示器手刹灯亮;半坡启动-实现坡道辅助;手刹未释放进行行驶,VCU 发送信息,增加蜂鸣报警。
7)动臂举升下降控制策略 当VCU 检测到动臂举升或下降,压力传感器的压力值对应不同的转速,0~4bar 时,控制液压电机转速为800rpm;4~10bar 时,控制液压电机转速为800~1 500rpm线性变化;10~20bar 时,控制液压电机转速为1 500~2 300rpm 线性变化。
8)翻斗装卸控制策略 当VCU 检测到铲斗装卸压力传感器的压力值对应不同的转速,0~2bar 时,控制液压电机转速为800rpm;2~10bar 时,控制液压电机转速为800~1 500rpm线性变化;10~25bar 时,控制液压电机转速为1 500~2 300rpm 线性变化。
9)转向控制策略 液压电机怠速800rpm。
10)多态选择控制策略 VCU 收到显示器模式信号,根据设定扭矩上限值控制行走电机。
11)模式选择控制策略 VCU 收到显示器模式信号,根据设定响应时间参数,控制行走电机。
12)倒车限速控制策略 在READY 条件下,在倒挡状态,限制车速不超过16km/h。
13)最高车速限制控制策略 在READY 条件下,在前进状态下,限制车速不超过40km/h。
14)手刹限功率控制策略 启动过程及行车过程中,接收到手刹信号,驱动电机限功至50%。
15)充电过程互锁控制策略 充电过程中,BMS检测充电枪连接状态并通过CAN报文发出,若充电枪未拔出,VCU 控制主接触器不能吸合,另VCU 采集到充电枪连接状态后,不发送扭矩。
16)故障管理策略 根据电机控制器以及BMS 发出的故障信息进行等级处理以及整车控制器进行环境及各个传感器的运行状态进行故障判定。故障等级分为三级,一级故障仪表显示预警VCU 不做处理,二级故障整车进入跛行,三级故障整车在车速接近零的时候开始进入下电流程。
3.2 软件应用层架构设计
整车控制器是装载机的核心控制部件,它采集加速踏板、换挡手柄、制动踏板、翻斗操作手柄、臂架操作手柄等数字信号或模拟信号,接收电池管理系统(Battery Management System,BMS)、变速箱控制单元(Transmission Control Unit,TCU)、电机控制单元(Motor Control Unit,MCU)、中控屏等各个子系统发送的数据信息,对接收到的数据信息按照控制策略进行解析和诊断,并发送相应的指令控制下层的执行机构。随着电子信息技术的发展,整车控制器的集成度越来越高,功能越来越强大。此项目的电动装载机采用双电机技术方案,根据IO 口数量和通讯要求,整车控制器采用Hip-ECU4000,微三核32 位控制器,具有4 路CAN、1 路RS232、2 路RS485 通讯和1 路车载以太网,支持Simulink 的应用层模型式开发,可以使用VCT工具完成一键生成HEX文件。
整车CAN 网络拓扑如图2 所示。整个应用层模型由任务调度、信号输入采集、控制策略模块、信号输出4 个主要模块组成。任务调度模块是按照设计要求,将模型分为不同时间周期的调度任务,最快周期为10ms,最大1 000ms,分为输入任务调度和输出任务调度。信号输入模块主要分为CAN 信号输入采集和硬线输入信号采集。控制策略模块主要根据采集的信号判断车辆信息,进行车辆状态判断,实现上下电、扭矩请求、扭矩协调、电气附件管理和故障判断处理功能。信号输出模块主要实现不同调度周期的CAN信号发送和硬线驱动信号输出功能。
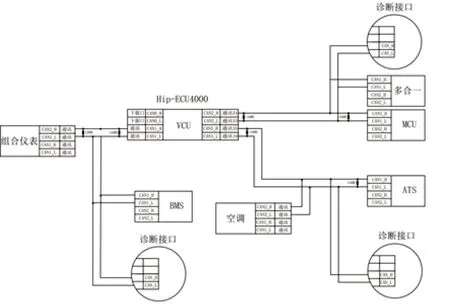
图2 纯电动装载机CAN拓扑图
3.3 纯电动装载机控制策略搭建
在Simulink 环境下搭建纯电动装载机整车控制策略模型,包括状态机模块、驾驶员扭矩请求模块、高压系统模块、低压电附件模块、READY模块和故障判断模块。
根据CREO 建立的纯电动装载机三维模型,将Simulink 作为服务器,建立与CREO 之间的联系,在config.pro 文件中设置路径,使用multibody 进行控制策略和三维模型的联合实时仿真,如图3 所示。
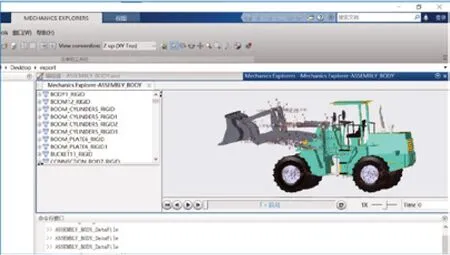
图3 纯电动装载机CREO与Simulink联合仿真模型
4 控制策略仿真与测试结果分析
4.1 控制策略仿真
在Simulink 中设置装载机操作界面(图4),通过自定义Input 信号,模拟驾驶员操作,动画演示纯电动装载机可以实现前进、后退、加减速、翻斗铲卸和臂架升降等基本动作,该模型满足纯电动装载机开发的基本要求。

图4 纯电动装载机整机状态仿真图
4.2 测试结果分析
通过VCT 工具将整车控制策略Simulink 模型转换成HEX 文件,烧录至整车控制器,通过CANOE 监测整车信号状态,如图5 所示。纯电动装载机行走电机转速满足电机特性曲线,工作电机怠速800rpm,转速随负载改变,从实测信号曲线看出,行走电机扭矩符合VCU 扭矩,整车策略符合电控功能需求。

图5 纯电动装载机电机状态信号测试图
5 结论
本文对某6t 纯电动装载机进行研究,通过动力性计算匹配三电系统,在Simulink 中搭建控制策略与CREO三维模型进行联合仿真,得到结论如下。
1)通过动力性计算得出,行走电机额定转速1 000rpm,额定扭矩1 200Nm,峰值功率240kW,工作电机额定转速2 000rpm,额定扭矩500Nm,峰值功率180kW,电压平台579.6V,电量351kWh。
2)通过Simulink 和CREO 的联合仿真与动画演示,本项目制定的16 项整车控制策略满足纯电动装载机的电控基本要求。
3)通过试验测试,装载机运行平稳,满足基本工况的使用。通过对比VCU 扭矩指令和实际电机扭矩,也证明了该电动策略的可行性。