基于RobotStudio 的复杂曲面抛光系统研究
2023-10-29钱亚玮金晓怡刘双龙奚鹰
钱亚玮,金晓怡,刘双龙,奚鹰
(1.201620 上海市 上海工程技术大学 机械与汽车工程学院;2.201804 上海市 同济大学 机械与能源工程学院)
0 引言
“中国制造2025”为我国智能制造指明了方向[1-2]。与发达国家相比,我国的自动化和工业机器人产业仍处在起步阶段,一些中小企业将“机器换人”作为现阶段企业发展的目标和方向,这可改善员工的工作条件[3-5]。夏仁兵[6]基于六自由度工业机器人研究并开发了复杂曲面零件的自动抛光系统,利用WHUT-CLGenerator 系统离线生成抛光数据,将其导入ROBCAD 系统验证轨迹的正确性及各多轴刀位点的可达性后,再导入WHUTRoPolish 系统完成抛光,该系统适用于大型零件,能够对任意复杂曲面零件实现自动抛光;谢海龙等[7]介绍了基于网格曲面参数化算法的抛光轨迹生成法等多种轨迹生成法,为曲面零件抛光的轨迹规划提供了较系统的解决方案;曹茗茗[8]以叶片型面抛光为例,设计了微细磨料水射流曲面抛光软件,该软件可以识别CAM软件导出的NC文件,用译码、轨迹规划、速度与处理等优化抛光轨迹。对复杂曲面抛光的研究多聚焦于轨迹规划,对零件的摆放位置也有一定要求,适用于个性化生产。我国有很多劳动密集型产业,需要用到的轨迹规划较为单一,例如手表行业[9]。手表行业中大部分工艺流程都由人工完成,特别是手表外壳的抛光工艺,其抛光过程较为复杂,需要操作人员手和眼高度配合才能完成,但长时间高精度、高效率工作非人力所及。
本文基于RobotStudio 仿真软件搭建了复杂曲面抛光系统的工艺仿真平台,固定砂轮,用机器人抓取表壳进行抛光,通过机械设备的稳定性提高手表外壳加工的产量和效率。
1 抛光系统流程设计
工业机器人常见的几个应用场景包括码垛、打磨、视觉、装配和仓储[10-12],本文的场景包括视觉和打磨,对IRB1200 工业机器人复杂曲面抛光系统的工艺流程进行设计,具体步骤如下:
(1)机器人旋转到初始位置等待上料。由人工上料(每个物料盘可放16 块表壳,表壳可随机摆放,如图1 所示),右侧工业相机对物料盘拍照并上传至上位机;视觉处理程序判断每个表壳的位置和角度信息;上位机进行信息储存,通过PLC的模拟量信号传输给机器人;机器人将每个表壳的信息存储到抓取队列中,之后机器人在右侧等待位置等待“Start”命令;

图1 物料盘上待加工表壳Fig.1 Watch case to be processed on material tray
(2)PLC 发送给机器人“Start”数字量信号,机器人依照抓取队列中的信息对表壳进行抛光。机器人首先运动到视觉队列中第1 个表壳位置上方并偏转相应的角度,保证与表壳的中线对应,然后缓慢降低高度至爪手可以抓取表壳。PLC 控制爪手抓取表壳,并将表壳移动到右侧抛光等待位置,缓慢靠近右侧抛光轮,按规划好的路径对表壳进行抛光。抛光结束,机器人原位放回表壳,进行下一个表壳的抛光;
(3)右侧物料盘的表壳全部抛光完毕后,机器人运动到初始位置。同理,对左侧物料盘中表壳重复步骤(1)、步骤(2)的操作。需要注意的是,此时右侧物料盘在流程上留有“空窗期”,所以工作人员要将右侧物料盘上的表壳进行更换,等待机器人下一次的抛光作业。左侧物料盘的表壳全部抛光完毕后,机器人运动到初始位置。
以上为一个循环作业过程,抛光作业不断由右侧至左侧循环。
2 抛光系统流程仿真
2.1 三维模型建立
RobotStudio 工作站中,本文选用的IRB1200工业机器人模型可从模型库中直接导入。虽然RobotStudio 软件提供内部建模的操作,但由于本工作站中的外围设备结构相对复杂,故选用SolidWorks 专业软件建立三维实体模型。IGES、STEP、VrML、ACIS 及CATIA 等模型格式均可导入RobotStudio,程序员可依据精确数据编写精度更高的机器人程序,从而提高产品质量[13]。图2 所示为整个仿真平台需要搭建的模型。

图2 仿真平台整体模型搭建Fig.2 Construction of overall model of simulation platform
复杂曲面抛光系统分为机器人本体、控制柜、上位机、左右物料区、抛光轮5 部分,整体布局如图3 所示。为最大限度地使用机器人的工作半径,将左右物料区关于机器人对称布置,上位机及控制柜布置在机器人后方,2 个抛光轮放置在机器人前方的抛光作业区,由同一个电机驱动。

图3 表壳抛光系统整体布局图Fig.3 Overall layout of case polishing system
2.2 I/O 信号
RobotStudio 中,Smart 组件能够代替PLC 模拟真实的数据通讯[14-16],实现上下料过程的仿真,用到的Smart 组件主要有Random、Comparer、Expression、VectorConverter、Source 和Sink。上下料Smart 组件逻辑流程图如图4 所示。
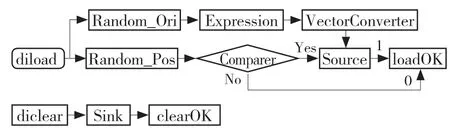
图4 上下料Smart 组件逻辑流程图Fig.4 Logic flow chart of Smart component for unloading and loading
由仿真程序向Smart 组件发送一个diload 的数字量上料信号,该信号同时激活Random_Ori 和Random_Pos 随机数组件,前者产生0~360 的随机数,后者产生-1~3 的随机数。Random_Ori 产生的随机数传到Expression 表达式组件进行角度转弧度换算,公式为“Random_Ori/180*pi”。经过换算的数据传输到VectorConverter 向量组件的Z轴数据中,产生的包含Z轴随机角度的向量存储到用来生成表壳工件的Source 源组件,等待生成信号的激活。生成信号则是Random_Pos 产生的随机数,经过Comparer 判断,Random_Pos ≥0 时输出1,随机数<0 时输出0。输出1 可激活Source 源组件以内部存储的位置及角度数据生成一个表壳工件,并将loadOK 信号置为1;反之,置为0。
下料主要用到的Smart 组件为Sink 删除组件。将上料过程中生成的表壳工件连接到Sink 组件的待删除源物体,等待仿真程序发送的diclear 信号激活Sink 组件便可将此表壳工件完全删除,模拟工作人员的下料操作。
上料完毕后,用Smart 组件实现夹爪对表壳工件抓取和放下的仿真。夹爪Smart 组件主要利用到PlaneSensor、Attacher、LogicGateDetach[NOT]、Detacher、LogicSRLatch 和LogicSRLatch_2。夹爪Smart 组件逻辑流程图如图5 所示。

图5 夹爪Smart 组件逻辑流程图Fig.5 Logic flow chart of gripper Smart component
夹爪逻辑思路:当夹爪转到待加工表壳位置时,来自仿真程序的数字量信号digrip 置1,激活装在夹爪上的PlaneSensor 面传感器,检测到物料后,激活Attached 组件,使检测到的物料安装在夹爪上。夹爪Smart 组件设计图如图6 所示。

图6 夹爪Smart 组件设计图Fig.6 Gripper Smart component design drawing
接下来,由机器人抓着表壳靠近抛光轮进行抛光,抛光轨迹在此不做详细分析。抛光完毕后,机器人将加工后的表壳放回原位置,仿真程序将digrip信号置0,PlaneSensor面传感器取消激活状态。同时,来自digrip 的0 信号经过LogicGate [NOT]逻辑非组件后输出1,激活Detacher 组件,加工后的表壳物料从夹爪上拆除。
每个Smart 组件都设有一个I/O 信号端口,通过I/O 信号端口,可以在工作站逻辑中对整个工作站的所有Smart组件进行汇总,包括信号的连接、逻辑的梳理等。整个过程相当于对仿真工作站的系统调试,目的是保证工作站能够按照预计的仿真流程运行,Smart 组件中部分I/O 信号的连接如表1 所示。

表1 夹爪Smart 组件I/O 信号连接Tab.1 Gripper Smart component I/O signal connection
2.3 程序设计
为了加工工艺过程的流畅,开始加工流程前的首要任务是系统初始化[17-19]。本文所编写的子程序按工作流程排序主要有左右侧识别程序、左右侧上料程序、左右侧下料程序、左右侧抛光程序、拾取程序、放置程序等,具体程序架构如图7 所示。

图7 表壳抛光系统程序架构Fig.7 Case polishing system program architecture
程序设计的关键是保证生产加工的可持续性和高效性[20]。在程序设计的过程中,为保证硬件稳定工作,需要对I/O 端口和变量进行初始化。Main()函数作为整个程序执行的起点,控制工作站的整个工作流程,调用Xialiao_R 和Xialiao_L 程序对物料盘初始化,调用Shangliao_R 程序使右侧物料盘上料,Recognition_R 对右表壳位置进行识别,当输入的数字量信号为1 时,与之对应的表壳工位激活并加入抛光队列,等待抓取程序GripCase、右侧抛光Polish_R、放回程序Putback,在识别的同时,调用Xialiao_L、Shangliao_L 程序。完成右侧物料盘上表壳的抛光工作后,对左侧物料盘执行同样操作。将上述右侧、左侧2 套操作并入一个For 循环语句,使整个抛光流程循环进行。
3 仿真结果分析
通过搭建三维模型、设计Smart 组件、连接I/O 信号、离线编程,完成了复杂曲面抛光系统在RobotStudio 软件中的仿真工作站设计,工艺仿真模拟效果如图8 所示。

图8 表壳抛光系统仿真模拟效果图Fig.8 Simulation effect diagram of watch case polishing system
在机器人对表壳抓取抛光过程中,RobotStudio软件提供的实时碰撞监测组件可以有效防止实际加工过程中机器人与外围设备之间、机器人末端夹具与抛光机之间发生碰撞[21]。机器人上下料过程中的碰撞仿真效果如图9 所示,碰撞监测分析中显示碰撞对象的名称以及碰撞点的坐标。

图9 机器人抓取表壳与抛光轮外壳碰撞图Fig.9 Collision diagram of robot grabbing watch case and polishing wheel shell
4 结语
本文基于RobotStudio 仿真软件搭建了复杂曲面抛光系统的工艺仿真平台,根据实际表壳工件参数创建了工件模型、设计了夹爪工具,并且对工作站中的外围设备进行建模;然后依照Smart 组件创建工作站逻辑,实现了表壳工件抓取和放置的动作效果,通过配置I/O 信号实现了仿真控制器与机器人的通信。编写离线程序,完成机器人识别表壳位置信息并进行抓取、抛光、放回等作业,利用碰撞监测功能实时监测加工过程中设备间的碰撞情况,以确保设备安全运行。该抛光系统结合了视觉和抛光两大功能,大大提高了手表外壳的抛光效率,改善了工人的工作环境。目前,抛光系统已投入生产。
