自动驾驶汽车换道决策行为分析及分子相互作用势建模
2023-10-24张可琨曲大义戴守晨
张可琨,曲大义,宋 慧,王 韬,戴守晨
(青岛理工大学 机械与汽车工程学院,青岛 266525)
自动驾驶汽车依靠智能化技术实现自主感知、决策与控制。自动驾驶汽车在感知交通信息后,需要选择与当前道路环境相匹配的行为,即进行自主行为决策。进一步而言,换道决策是自主决策中的重要组成部分,影响着车辆运行的安全性与高效性。随着智能交通技术的发展,国内外学者围绕规则[1-3]、人工智能[4-6]和效用函数[7-9]进行换道决策的研究。
从换道决策的角度出发,通常的研究侧重于换道车辆周围的固定临界空隙,而对换道场景中动态要素的考虑相对较少。随着自动驾驶技术的发展,自动驾驶汽车的换道决策逐渐成为一个研究热点。在智能网联交通的背景下,自动驾驶汽车的换道首先要满足安全性,同时也应兼顾合理性与高效性。自动驾驶汽车的换道是含有随机性的微观驾驶行为,具有自主性与动态性。因此,本文考虑系统的相似性,将微观的车辆比拟为分子,深入分析自动驾驶汽车的换道行为特性,基于分子相互作用势及动态影响要素构建自动驾驶汽车的换道模型,从而使得自动驾驶汽车安全且高效地运行。
1 换道行为分析
自动驾驶汽车在道路上行驶时,会根据变化的交通环境采取相应的行为,而通过自动驾驶操作实现车道变更的决策行为即为自主换道行为。通常而言,换道与跟驰相比,易诱发交通事故以及交通拥堵等消极状况。因此,为顺利实施换道,应综合考虑空间条件及时间条件。对于空间条件而言,换道车辆与周围车辆具有一定的交互性,因此应与周围车辆保持安全的换道间距;对于时间条件而言,车道的变更需要一段连续的时间来实现,在这个时间段内自动驾驶汽车进行感知、决策与执行,通过应对所处的交通环境而实施高效换道。
一般车辆的换道类型分为两种:一种是存在障碍性的环境使得车辆必须采取换道行为;另一种是为了获得速度收益或改善驾驶状态而采取换道行为。前一种为强制换道,后一种为自由换道。自由换道是非必要性换道,有时会受到交通环境影响以及综合自主决策而选择放弃换道。现对自动驾驶汽车的自由换道决策行为展开研究。
2 系统相似性分析
从高空观察道路上运行的车流,车辆就像一个微小的分子在运动。分子与车辆具有一定的相似性。分子之间有间隙,而车辆在行驶时也与周围车辆保持一定的间距。此外,气味的扩散表明运动着的分子与宏观现象存在因果联系。而在交通系统中,车辆的换道有时会对目标车道上的车流造成一定的扰动,最终在宏观上形成路段上的交通拥堵。
在分子系统中,引力与斥力同时存在,其合力表现为分子间的相互作用力。通过比较实际分子间距r与平衡距离r0,可探究分子间的相互作用关系。如图1所示,当r

图1 相互作用力
由牛顿运动定律可知,物体在外力的作用下可实现自身运动状态的改变,而未产生接触的两物体则通过势场来实现力的效果,从而转变运动状态。一般无论是分子还是车辆,其在运动的过程中因存在间隙而未产生实际接触的行为。故追本溯源,从分子相互作用势的角度研究自动驾驶汽车的换道行为,从而确保其安全且高效地运行。
3 分子相互作用势换道决策行为模型构建
3.1 分子相互作用势阐述
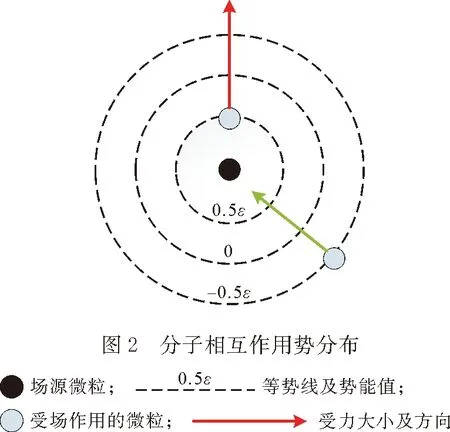
势场具有特定的属性,可对其范围内的物体产生影响,影响程度会随着物体位置的不同而发生变化。如图2所示,场源是形成势场空间的先决条件,使得存在于势场中的物体受到力的作用效果,从而改变运动状态。
为研究车辆之间的相互作用关系,相关学者基于势场理论建立了不同模型[10-12]。通常,使用势场理论分析跟驰行为的研究相对较多,而分析换道行为的研究相对较少。此外,在势场理论的引入方面,分子相互作用势结构合理,模拟贴合实际,因而应用效果好。
在分子相互作用势中,两个微观分子是彼此受到相互作用力的场源。此外,与一些将引力项和斥力项分别独立表达的势场模型相比,分子相互作用势将吸引作用与排斥作用统一于一个整体,能较好地表现物体间的相互作用。一般相互作用势在实际中的应用形式如下:
(1)
自动驾驶汽车的附近车辆作为一个场源,产生的相互作用势将形成力的效果。如图3所示,相互作用势的分布会随着车间距的不同而变化,从而影响车辆的自主决策,最终改变车辆的运动状态。因此,车辆间的相互作用势可以在一定程度上理解为交通要素作用于车辆的人工势场。

图3 相互作用势分布
3.2 分子相互作用势换道模型建立
自动驾驶汽车的换道决策主要围绕周围的交通环境进行自主分析,判断自身所处的场景是否适合换道。通常,目标车道车辆会对当前车道车辆的换道决策产生极大的影响。如图4所示,将在道路上沿着车道中心行驶的车辆比拟为分子,基于分子间的相互作用分析换道车辆分子L的受力情况,从而使得换道决策更加合理。
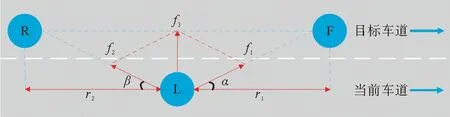
图4 换道车辆分子受力分析f1—车辆F施加给车辆L的作用力;f2—车辆R施加给车辆L的作用力;f3—车辆L受到的合力;α,β—车辆L同车辆F,R的水平夹角;r1,r2—车辆L同车辆F,R的纵向车间距
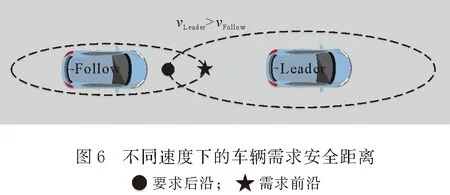
自动驾驶汽车在执行换道操作前,应对空间条件进行判断,从而获得合适的换道间距以保证安全性。车辆的换道空间需求包括横向需求和纵向需求。横向空间需求体现在车道宽度上,通常在换道过程中得以被满足;而纵向空间需求体现在目标车道前后车提供的车间距上。自动驾驶汽车在换道时应重点分析目标车道提供的换道需求安全距离,同时这也是本文的一个研究重点。
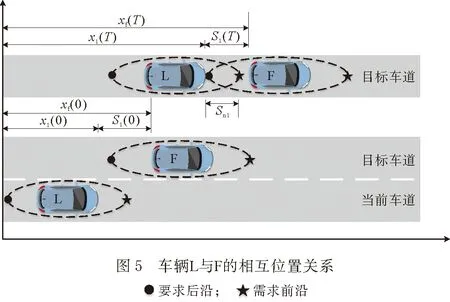
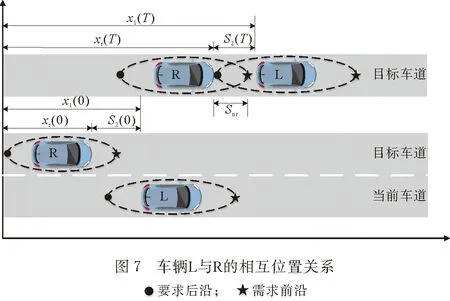
聚焦于自动驾驶汽车L的换道过程,对车辆L与F的相互位置关系进行分析,可得
S1(T)=S1(0)+(xf(T)-xf(0))-(xl(T)-xl(0))
(2)
式中:xf(0),xf(T)分别为车辆F在换道初始时刻以及在换道完成时刻的纵向位置;xl(0),xl(T)分别为车辆L在换道初始时刻以及在换道完成时刻的纵向位置;S1(0),S1(T)分别为车辆L与F在换道初始时刻以及在换道完成时刻的纵向车间距。
车辆L与F的相互位置关系如图5所示。
在自动驾驶汽车的行驶过程中,车辆的运行速度与车头间距存在函数关系[13],经转换可得
Sn=ηv+γv2
(3)
式中:Sn为车辆的需求安全距离;η为车辆的自主反应时间;v为速度;γ为最大制动减速度2倍的倒数,通常可取0.07 m/s2[14]。
由式(3)可知,需求安全距离与速度具有一致相关性。如图6所示,车辆速度提升则其需求安全距离增大,车辆速度降低则其需求安全距离减小。一方面,此情况与运动分子的“热胀冷缩”现象具有相似性;另一方面,这与现实交通场景中的车辆运行情况也相符。
基于上述的分子相互作用势理论,将车辆的需求安全距离与实际车间距进行结合,进一步拓展到需求距离饱和系数:
(4)
式中:Cn为车辆的需求距离饱和系数;L为实际车间距。
基于需求距离饱和系数,若要车辆L在换道完成后能安全地跟随车辆F行驶,则应保证在目标车道上车辆L的“需求前沿”不越过前方车辆F的车尾边界,即确保车辆L在需求距离饱和系数上满足Cnl≤1,将其应用到式(2)(4),可得式(5)。此外,考虑安全性且兼顾车辆行驶的高效性,故通过式(5),可得车辆L与F的初始期望安全间距,如式(6)所示。
S1(0)≥Snl+(xl(T)-xl(0))-(xl(T)-xl(0))
(5)
(6)
由式(6)可以得出:SE(l,f)是一个动态变化的距离,且会受到车辆L与F的加速度、速度以及换道完成时间的实时影响。
在考虑初始期望安全间距与换道初始时刻纵向车间距相互关系的同时,结合车辆分子的相互作用势,可得当前车道车辆L与目标车道车辆F在换道初始时刻的相互作用势φ1(l)。在此基础上,使φ1(l)对S1(0)求导,可获取换道初始时刻目标车道车辆F施加给当前车道车辆L的作用力f1(l)。最终通过力与加速度的关系,获得车辆F给予车辆L的加速度a1(l)。
(7)
(8)
(9)
式中:m为自动驾驶汽车L的质量。
由于目标车道上的车辆F和R均会对车辆L的换道决策产生影响,故在探究车辆L与F的相互关系后,还应对车辆L与R的相互关系进行分析。车辆L与R的相互位置关系如图7所示。
基于上述车辆L与F相互关系的推理过程,对车辆L与R的相互关系进行相似化研究。故依次可得车辆L与R的初始期望安全间距以及目标车道车辆R给予换道车辆L的加速度a2(l):
(10)
(11)

(12)
(13)
在获得加速度的基础上,结合图4中换道车辆L的受力情况,将加速度分解重组,可得出车辆L的横向加速度与纵向加速度,即
ah=a1(l)sinα+a2(l)sinβ
(14)
az=a1(l)cosα+a2(l)cosβ
(15)
将式(12)(13)代入式(14)(15),可得换道车辆L横向加速度与纵向加速度的最终表达式:
(16)
(17)
当ah>0时,车辆L受到的作用力为引力,车辆可利用纵向加速度实现速度上的改变以进行换道;当ah≤0时,车辆L受到的作用力或表现为斥力或表现为零,此时车辆宜放弃换道,保持在当前车道行驶。综上分析,自动驾驶汽车可从加速度的角度进行自主换道决策分析,从而使其能够安全且高效地实施换道。
4 实验验证分析
4.1 实验平台与环境
本文通过SUMO平台获取换道信息并进行换道实验。SUMO是一个开源的、多模式的交通实验平台,可以实现和评估交通研究。它内置一些换道模型,并配有一套用于场景创建的工具,能合理地进行车辆换道实验。此外,SUMO内部的TraCI (Traffic Control Interface) 功能可以追踪车辆并获取换道信息。在智能网联环境下,SUMO逐渐应用于自动驾驶的研究,也在一定程度上促进了自动驾驶技术的发展。
4.2 实验数据分析
将实验环境设置为自动驾驶环境。此外,设置一条单向双车道的高速路段,其长度为3 km且限速为120 km/h。首先,在一段时间内对车辆轨迹信息进行提取,结果如图8所示。不同颜色的线条代表不同车辆的轨迹。某一段距离上的线条密集,表明该段距离上的交通环境未能较好地满足车辆的期望,较多车辆产生换道意图,故而换道轨迹相对较多。某一段距离上的线条稀疏,表明该段距离上的交通环境较好,车辆的换道意图不强烈,因此换道轨迹相对较少。车辆的行驶轨迹不同,换道过程也不同。在行驶的过程中,车辆的纵向位置不断变化。当实施换道过程时,车辆的横向位置也开始改变。因为实验设定了单向双车道路段,而且车辆沿着车道中心线行驶,所以车辆的换道宽度通常是单个车道的宽度。车辆在路段1500~2000 m的位置上行驶时,交通环境相对较好,车辆运行速度较高。在这一段位置上,车辆的换道意图不强烈,因此换道轨迹相对较少。
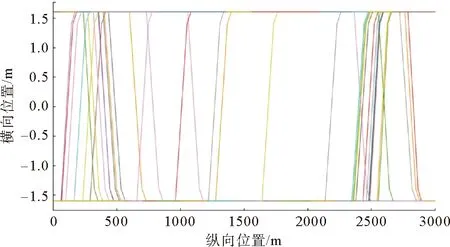
图8 车辆的轨迹信息
为研究车辆的整体运行情况,对车辆的平均速度以及平均加速度进行分析,如图9所示。图9(a)展现了车辆行驶时的平均速度。自动驾驶车辆在道路上行驶时根据周围的交通环境进行了自主性的加速和减速。因为车辆在高速路段上行驶并且阻碍性条件相对较少,所以,在整体上车辆以较小的速度波动状态稳定运行。图9(b)展现了车辆行驶时的平均加速度。车辆的加速度呈现出波动的状态,并且加速度的变化区间为-0.6~0.6 m/s2,这使得车辆在速度上呈现出相对较小的波动。总而言之,实验车辆在道路上能以较稳定的状态行驶。
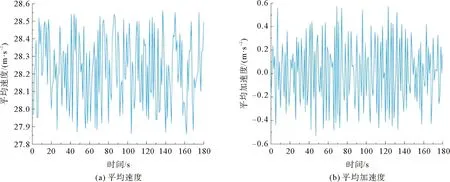
图9 车辆的行驶情况
在SUMO平台中使用TraCI功能对换道车辆进行追踪,获得的换道信息如图10所示。图10 (a) 为换道车辆的横向速度变化情况。车辆在沿车道中心线行驶的过程中,若横向速度发生变化,则表明其实施换道操作。在整个换道阶段,车辆的横向速度先增大后减小。在到达目标车道后,车辆的横向速度又变为零。图10 (b) 为换道车辆的横向偏移量。具体而言,横向偏移量是车辆右侧相对于道路右边缘的偏移量,它显示了车辆横向位置的变换情况。若车辆实施换道,则其横向偏移量发生变化。综上可得,车辆在被追踪的时间内进行了两次换道。此外,图10 (a)与图10 (b)显示的换道信息相一致。

图10 换道车辆的信息
4.3 分子相互作用势换道模型评价
通过SUMO平台获取换道数据并对分子相互作用势换道模型的参数进行标定,使分子相互作用势换道模型具有合理性以及实际应用性。基于此,分子相互作用势换道模型得以清晰化,从而评价其性能。模型的参数标定见表1。

表1 分子相互作用势换道模型的参数标定
基于上述的换道场景,将分子相互作用势换道模型与SL2015换道模型进行对比分析,从而客观地评价分子相互作用势换道模型的性能。SL2015换道模型是SUMO内部的一个移动模型,其额外的行为层负责维持安全的间隙,可以使用 vType 属性设置所需的间隙。此外,车辆被放置在精确的纵向和横向位置以匹配指定的坐标,从而科学地进行换道决策。SL2015换道模型支持的附加参数见表2。

表2 SL2015换道模型支持的附加参数
此外,SL2015换道模型与分子相互作用势换道模型下的车辆特征参数见表3。

表3 车辆特征参数
如图11所示,从速度指标分析模型的性能。图11(a)展现了与SL2015换道模型相比,分子相互作用势换道模型下车辆的平均速度较大,且波动性较小。在图11(a)的基础上,图11(b)进一步客观地展现了分子相互作用势换道模型下车辆的平均速度的增加量以及速度波动程度的减少量。图11(b)是箱线图,每个箱体周围的3个数据从上到下依次为最大值、平均值以及最小值。与SL2015换道模型相比,分子相互作用势换道模型下的车辆速度平均提升了3.49%,速度波动程度降低了15.45%。此外,在实验的过程中,分子相互作用势换道模型下的车辆没有碰撞事故。综上所述,本文所建立的分子相互作用势换道模型具有较好的安全性以及高效性。分子相互作用势换道模型使得自动驾驶车辆在制定换道决策时可以兼顾安全与效率并且在面对变化的交通环境时可以动态地调整速度,而这也将使得自动驾驶车辆的控制层可以更为平稳地执行换道。
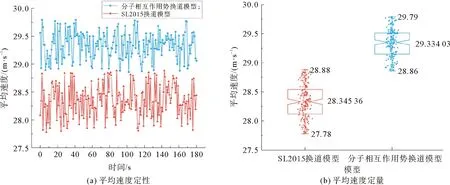
图11 不同模型下换道车辆的平均速度对比
如图12所示,基于车辆通过数分析模型的性能。图12(a)展示了车辆通过数随车流量的变化情况。当车流量不断增加时,两种模型下的车辆通过数不断增大。但是,与SL2015换道模型相比,分子相互作用势换道模型下的车辆通过数较多,并且这一情况在车流量大于1500 veh/h时更明显。图12(b)进一步直观地展现了分子相互作用势换道模型下车辆通过数的增加量。与SL2015换道模型相比,分子相互作用势换道模型下的车辆通过数平均增加了5.93%。综上所述,分子相互作用势换道模型具有较好的道路利用率。随着汽车保有量的逐渐增多,车辆对于道路利用率的需求也逐渐增大。因此,分子相互作用势换道模型还对当下及未来的交通环境具有适应性以及实际应用性。
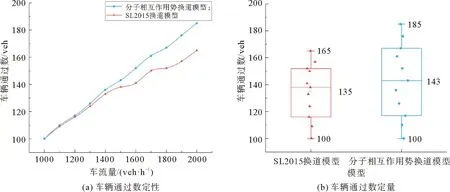
图12 不同模型下的车辆通过数对比
车辆的换道行为会对目标车道的车流产生一定的扰动[15]。换道车辆的扰动性越小,目标车道的车流就能以较小的延误去高效地行驶。因此,基于扰动性来分析换道模型的性能。将20辆车组成一个车队并且车队在目标车道后方行驶。如图13所示,车队中的车辆在受到换道车辆的扰动后,速度的波动会向后传递并且波动程度逐渐降低,这个情况与实际场景也相符。但是,两种模型下的换道车辆对目标车流的扰动性不同。相比于SL2015换道模型,分子相互作用势换道模型下的换道车辆对目标车道车流的扰动性更小。车流在受到分子相互作用势换道模型下换道车辆的扰动后,能以较短的时间恢复之前的行驶状态,且速度的整体波动性也较小,这就使得车流更稳定且高效地行驶。综上所述,分子相互作用势换道模型具有较好的稳定性以及高效性。分子相互作用势换道模型下的换道车辆善于选择换道时机并进行“友好型”换道,从而促使车辆和谐地行驶并在一定程度上缓解交通拥堵问题。

图13 不同模型下换道车辆的扰动性对比
5 结论
1) 通过系统相似性分析探究分子与车辆的相似性,将分子相互作用势理论应用到自动驾驶环境下的交通场景并建立分子相互作用势换道模型,科学地展现了自动驾驶车辆的换道特性。
2) 分子相互作用势换道模型在考虑动态影响要素的同时,将吸引作用与排斥作用统一于一个整体,从而形成合理的换道决策机制,使得自动驾驶汽车能安全且高效地实施换道。实验结果表明:与SL2015换道模型相比,分子相互作用势换道模型下的车辆运行速度平均提升了3.49%,速度波动程度降低了15.45%,车辆通过数平均增加了5.93%。此外,未有车辆发生碰撞事故且换道车辆的扰动性较小。因此,分子相互作用势换道模型具有较好的安全性、稳定性以及车道利用率。此外,本研究与自动驾驶车辆的发展阶段相适应,在一定程度上可以为自动驾驶车辆的换道研究提供理论依据与技术支撑。
