某舰载跟踪雷达伺服系统设计与仿真分析∗
2023-10-20张溦
张 溦
(1.中国电子科技集团公司第二十研究所 西安 710068)(2.中国电子科技集团公司第二十研究所高端电子装备工业设计中心 西安 710068)
1 引言
某型雷达是集搜索、跟踪于一体的舰载雷达,其伺服系统是该雷达的重要组成部分,主要功能是驱动天线完成方位方向的调舷、环扫等动作,并与电子跟踪通道共同实现对目标的精确角度跟踪[1]。伺服系统将方位位置误差设定为控制系统的输入,不断通过反馈补偿减小天线与目标之间的误差,直到天线波束对准目标。伺服系统性能好坏会对天线的动态性能、定位精度和跟踪精度产生直接影响[2~4]。本文通过设计某型舰载跟踪雷达伺服系统,对其进行仿真,验证设计的可行性。
2 伺服系统控制原理
跟踪雷达伺服系统由电流、速度和位置三层闭环控制组成,为多回路反馈控制系统。最里环为电流环;中间环为速度环,应具有较好的抗扰性能;最外环为位置环,希望实现无静差[5~7]。速度环中的反馈速度由位置差分解算[8],该控制架构具有先天的解耦控制效果,典型的雷达伺服系统三闭环控制结构如图1所示。
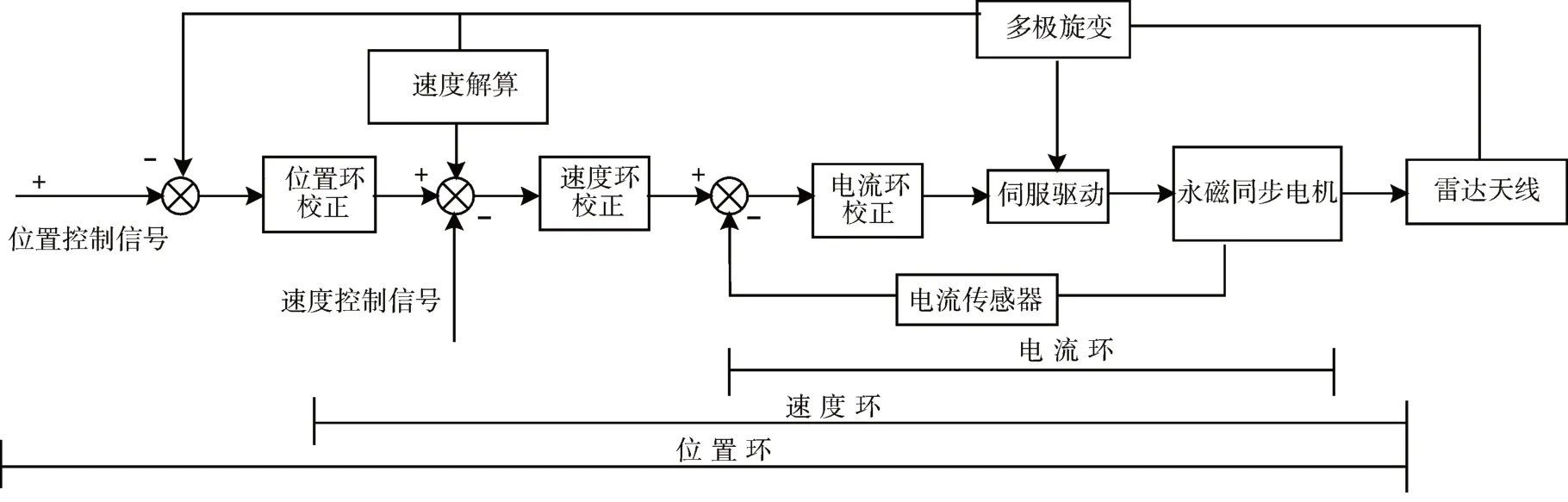
图1 伺服系统控制原理框图
3 系统设计
该型雷达伺服系统由控制器、驱动器、执行器、传感器、负载(天线座)等组成,如图2 所示。图中控制器采用了DSP+FPGA 架构,完成了伺服控制、三环校正、天线速度解算、R/SDC 解算旋转变压器位置信号、驱动器控制等功能;执行器包括方位永磁同步电机及自动锁电机;传感器是多极旋转变压器。其中,永磁同步电机、旋转变压器、自动锁电机、自动锁控制模块安装在天线座上。电机及旋转变压器完成雷达天线驱动和位置检测[9],自动锁控制模块实现自动锁在规定指令下进行开闭锁。伺服驱动器接收控制器电流指令,完成永磁同步电机电流闭环控制。

图2 伺服系统组成框图
4 软件设计
伺服系统采用模块化的软件设计理念,划分成初始化模块、控制模块、定时中断模块。伺服系统控制软件以定时中断方式工作,工作周期2ms。伺服系统控制软件组成框图如图3所示。
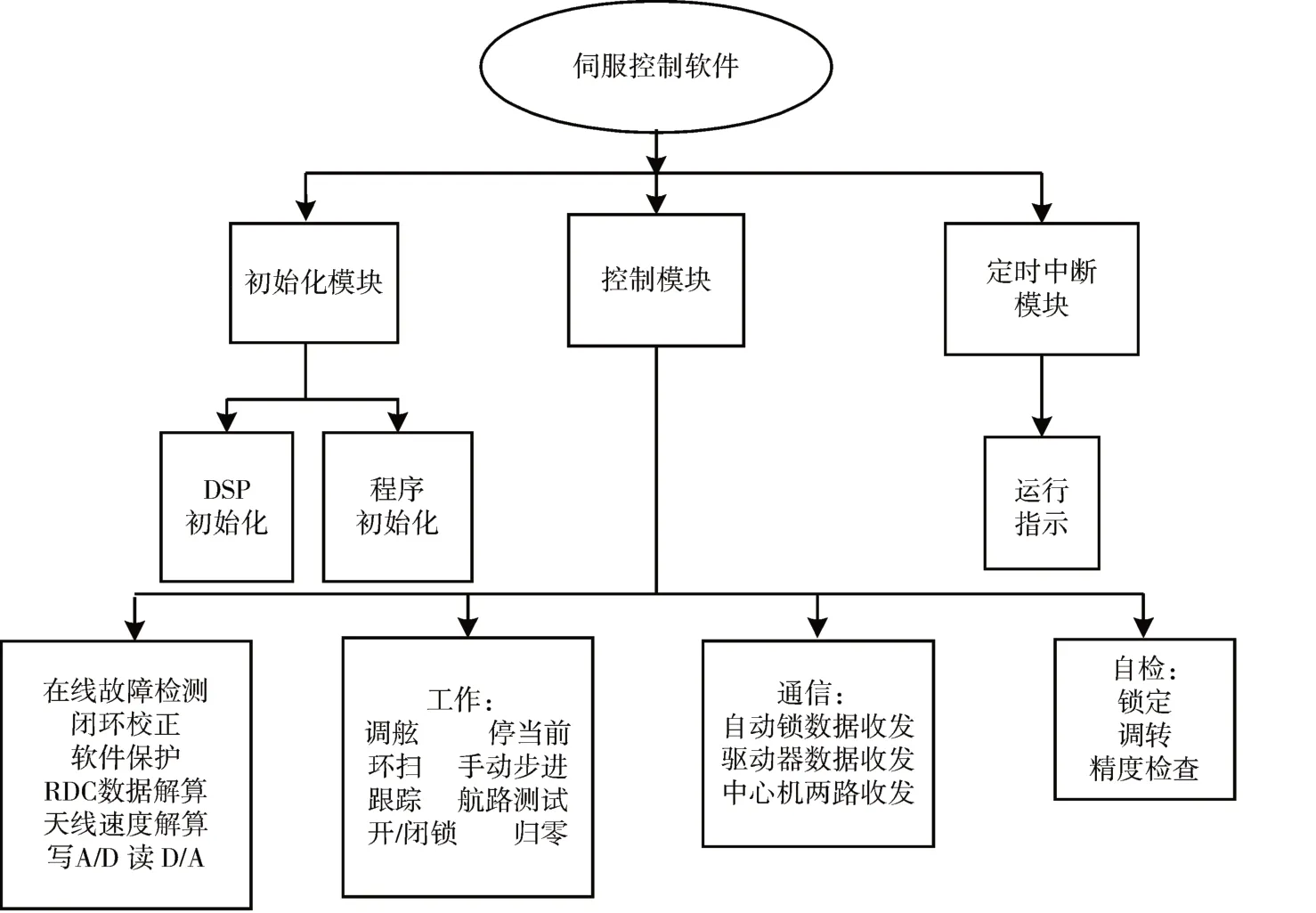
图3 伺服系统组成框图
该伺服系统软件工作模式包括了调舷、环扫、步进、跟踪、开闭锁等九个子程序,还同时包括在线故障检测、软件保护、天线速度解算、闭环校正RDC数据解算、数据收发等。伺服控制软件根据接收到的控制指令及误差角度,调取不同的子程序,并计算位置和速度误差信号进行闭环控制,最终输出永磁同步电机的电流信号给驱动器,驱动电机实现天线按指令转动。
5 系统仿真
雷达在跟踪目标的过程中,用永磁同步电机控制雷达天线转动,调整天线指向目标。本文按伺服控制系统各参数建立模型,进行Simulink仿真。
电流环是整个伺服系统其他环路的基础,希望电流环做到无静差,需要把电流校成I型系统[10~11]。该伺服系统选用的电机参数如表1所示。

表1 永磁同步电机参数
在Simulink 中建立电流环仿真模型,如图4 所示。

图4 电流环仿真模型
得到电流环开环、闭环频率特性图如图5、图6,电流环开环增益为59.9dB,截止频率为154Hz,相位裕度为84.4°,闭环带宽为171Hz。

图5 电流环开环频率特性图

图6 电流环闭环频率特性图
经电流调节器校正后的电流环是速度环中的一个环节,可近似为一阶惯性环节。速度环仿真模型如图7所示。

图7 速度环仿真模型
可得速度环开环、闭环频率特性图如图8、图9,速度环开环增益为39.7dB,截止频率为5.61Hz,相位裕度为83.9°,闭环带宽为6.17Hz。

图8 速度环开环频率特性图
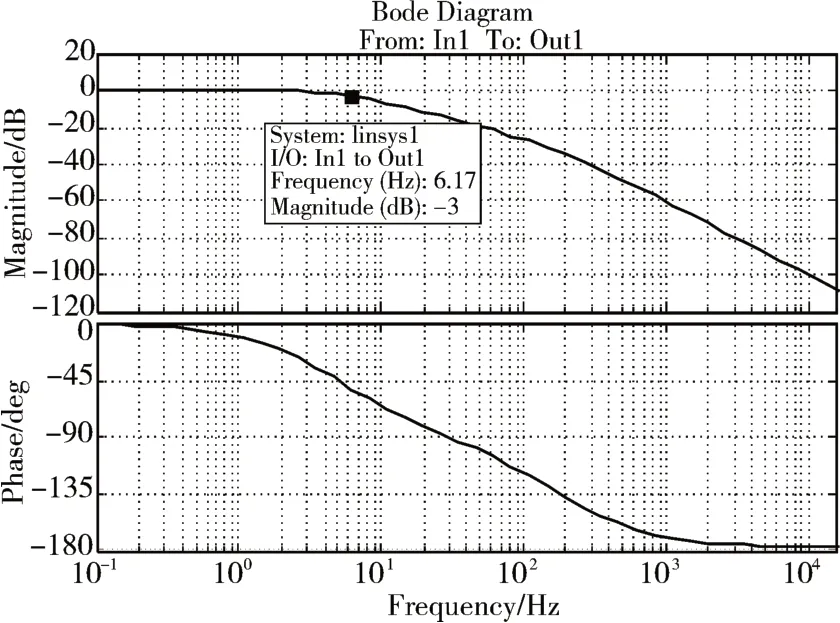
图9 速度环闭环频率特性图
位置环为实现无静差需设计成I 型系统,速度环作为位置环的一部分,可近似成一个惯性环节[12]。因位置环路中本身就有一积分项,实际上已经是一个I 型系统,故位置环只须采用比例调节器。位置环仿真模型如图10所示。

图10 位置环闭环阶跃响应图
可得位置环开环、闭环频率特性图如图11、图12,位置环开环增益为22.4dB,截止频率为2.08Hz,相位裕度为68°,闭环带宽为3.1Hz。
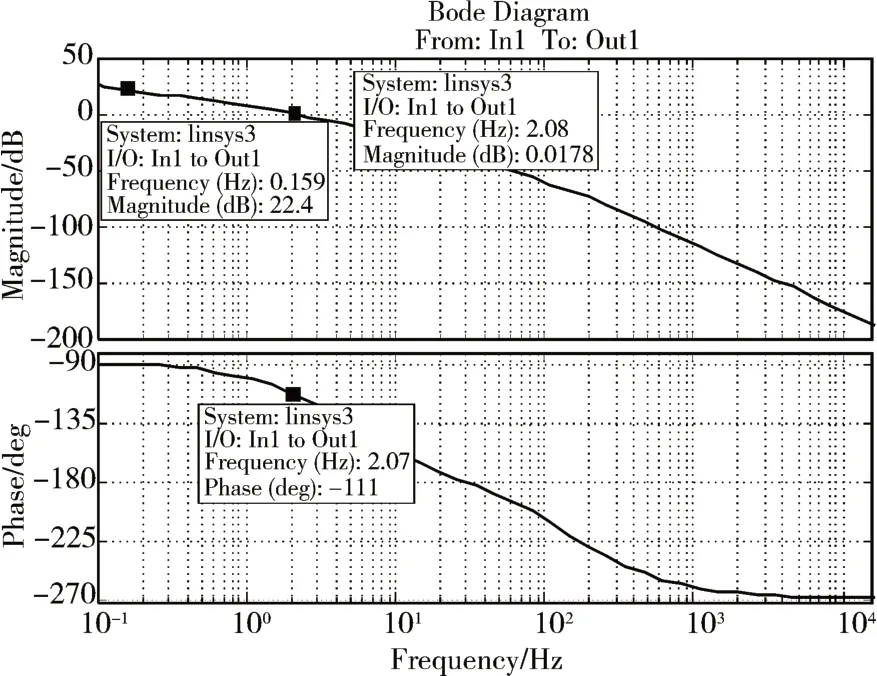
图11 位置环开环频率特性图
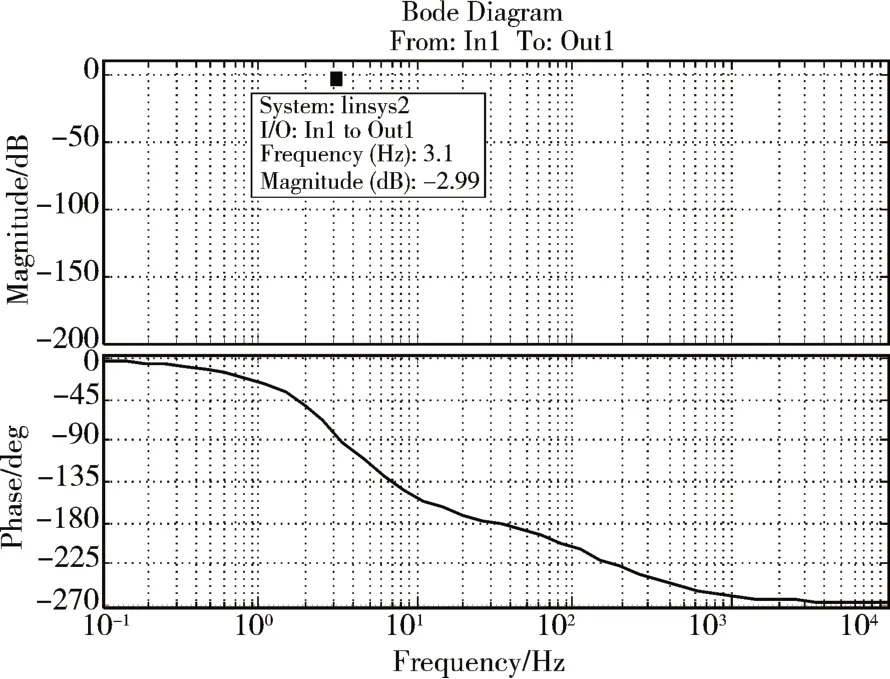
图12 位置环闭环频率特性图
6 航路仿真验证
给定航路条件如图13 所示进行仿真验证,其中航路总距离22440m,航路捷径P=410m,目标高度H=400m,目标速度V=1020m/s。利用Matlab 编写模拟航路子函数作为伺服系统输入[13],航路仿真模型如图14 所示,得到的跟踪航路曲线如图15 所示。仿真模型中距离AB 为过捷后航路的距离,即总距离的一半。

图13 航路示意图
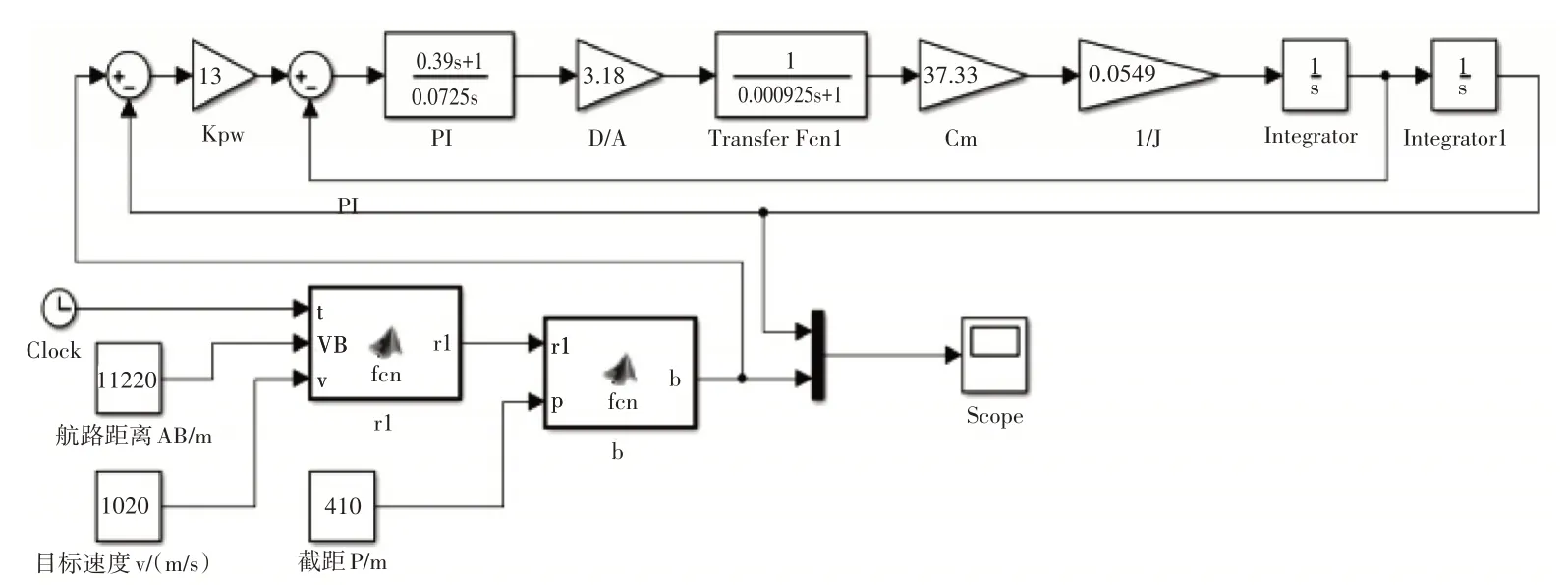
图14 航路仿真模型
根据仿真结果能够看到伺服系统在模拟航路开始部分有很小一段超调外,其余阶段能够较好地对目标进行跟踪。且在实际验证中,该模拟航路系统误差0.01 mrad,随机误差0.84 mrad,均可满足系统指标要求,较好地完成模拟航路验证。

图15 航路跟踪曲线
7 结语
本文从实际需求出发,开展某舰载跟踪雷达伺服系统设计,以三闭环控制原理为基础进行系统与软件设计,并用Simulink 进行建模仿真,验证了设计的可行性。
