基于数据间支持度的数据融合处理方法研究∗
2023-10-20李鹏
李 鹏
(92941部队 葫芦岛 125001)
1 引言
数据融合的概念于20 世纪80 年代由美国提出,最早应用于军事领域[1~2],数据融合的目的在于提高数据处理精度,掌握数据质量和目标跟踪状态。关键是建立数据融合处理方案,构建融合模型和引进先进的估计算法[3]。数据融合处理的经典方法包括卡尔曼滤波、加权平均、模糊逻辑、神经网络、参与估计等[4]。
针对高速弹丸[5]目标在海上射击时,装备沿海测量受海面反射、能见度、布站条件等限制较大;高速弹丸低空飞行段测量易受山体、建筑物等遮挡,跟踪过程中易出现数据稳定性不好的情况;参加测量的装备类型较多,在测量体制及测量精度上存在较大差异。
根据测量任务实际,以及弹丸目标具有高空高速、目标特性不明显、不加装GPS 及遥测系统等特殊性,综合分析实际测量条件,本文提出一种基于数据间支持度的数据融合算法,充分利用多测量数据源的信息,根据数据间支持程度,动态计算每个测量数据在全体测量数据中的权值系数,完成信息融合计算,得到完整准确的航迹融合结果。
2 信息融合结构模型
数据融合是多层次多级别的数据综合处理过程[6~7],从多源信息系统的数据流通方式和综合处理角度出发,弹丸目标航迹信息融合主要是位置级融合,位置级融合结构模型主要有两种:集中式融合结构、分布式融合结构、混合式融合结构[8]。
集中式融合结构优点在于最大程度地利用了原始测量信息,信息损失小,但对融合数据处理能力要求较高,且当测量数据不稳定时算法流程比较复杂,易造成参数结算及数据关联困难。混合式融合结构是集中式和分布式的结合,在系统开销上付出的代价很高,适用于某些特定环境。
经过对测控装备布站、测量数据精度、目标航路规划等综合分析,本系统采用分布式融合结构,优点在于测量信息经局部处理后信息相对稳定,可减轻融合中心的负荷,实时性较强,能够提高融合结果的稳定性和精度。图1 为分布式融合结构模型图。
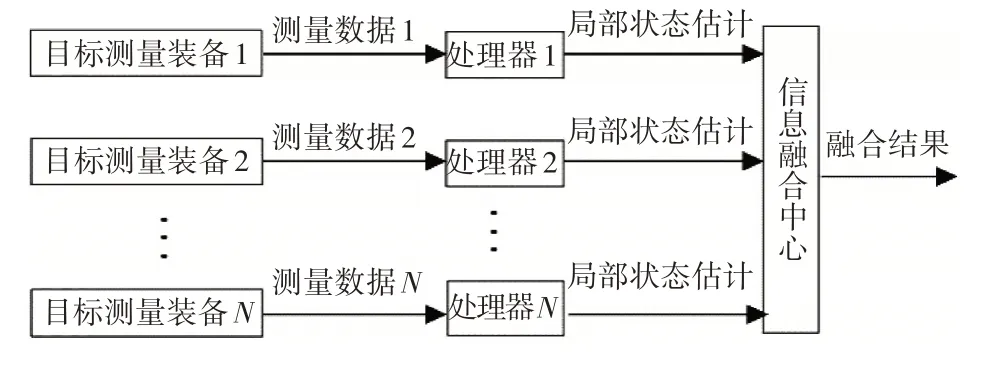
图1 分布式融合结构模型图
3 局部状态估计
3.1 测量数据预处理
受测量环境、装备操作、天气等因素影响,测量数据中不可避免的存在野值。数据预处理主要是剔除数据中的粗大野值,并对数据进行补全[9~10]。经对比分析,五点线性预报法对剔除粗大野值简单有效,算法分为差分检验、线性预报两部分,先用求一阶差分和四阶差分的方法,对数据进行合理性检验,发现并剔除明显的野值点,再按五点线性预报公式补全。
第一步,对测量信息进行一阶差分Δ1yi=yi+1-yi,用四阶差分检验法进行初始检验,找出一组合理点。
第二步,数据四阶差分值:
式中,j≥5,取门限M1,判断 |Δ4j|≤M1是否成立,若是,则为一组合理点,否则,令j=j+1,继续进行四阶差分检验。
第三步,用五点线性预报公式进行数据检择与修正:从以上求得的五个合理点yj-4,yj-3,yj-2,yj-1,yj为基点,按照线性预报公式计算:
式中,Pi=(3i-7)/10 ,取门限M2,判断是否满足,若是,则为合理,否则为野值。
第四步,令yi+1=,j=j+1,继续四阶差分检验,对数据进行初始检验,找出一组合理点,再继续利用五点线性预报公式进行检验与补点。
3.2 无迹滤波模型
无迹滤波(Unscented Filter,UF)是20 世纪Julier等提出的一种用采样方法近似非线性分布的非线性滤波方法[11~12],是利用无迹变换(Unscented Transform,UT)在估计点附近确定采样,用这些样本点的分布来近似表示非线性函数的分布。
定义非线性系统:
其中,Pv为过程噪声方差,Pn为测量噪声方差。
根据采样策略,得到k 时刻的状态估计的Sigma点集。
其中,λ为尺度参数,L为增广向量维数。
更新方程:
4 基于数据间支持度的加权融合计算
该算法的基本原理:各测量数据经野值剔除、时空对齐、平滑滤波等处理得到各自的局部估计后,对各局部估计间的相互支持程度进行计算,据此建立支持度矩阵,并计算每个测量数据在全体测量数据中的权值系数,根据各个权值进行融合计算。为避免外接因素对测量数据的干扰,在实时性允许的条件下,对上述结果再次进行滤波,得到全局状态估计信息,即最终的加权融合计算结果。
为更好地完成目标测量任务,在目标航路附近布设n 台测量设备,保证测量数据的冗余性,即同一时刻得到n 个测量数据(x1,x2,…xN),各测量数据经野值剔除、时空对齐、滤波等处理得到各自的局部估计后,计算各测量数据间的相对距离。
式中,的值越大,说明两个数据间的差别就越大;的值越小,则数据间的差别越小。根据计算结果建立相对距离矩阵,即:
根据数据支持度性质可知,数据对自身的支持度函数的值为1。由函数表达,可知值越小,说明数据间差别就越小,支持度函数值就越大,支持度就高;越大,说明数据间差别就越大,支持度函数的值就越小,支持度就低;当取得最大值时,支持度函数值为零。可见,∊[0 ,1] 的取值为[0,1]。
据此,建立支持度函数矩阵,可表示为
矩阵中的数据代表了两两数据间的相互支持程度,但无法说明某一数据相对于整体而言的总支持度。需要计算每个数据的权值,用于完成融合计算。
设存在一组非负数:(a1,a2,…an)使得
矩阵形式可表示为
其中,W=[w1(k),w2(k),…wn(k)]T,A=[a1a2…an]T。
支持度矩阵是一个非负矩阵,存在最大模特征值λ≥0,通过l*A=R(k) *A可求得最大模特征值的特征向量A,从而求得每个数据权值,表示为
由此可得到加权融合结果,即:
为避免外接因素对测量数据的干扰,在实时性允许的条件下,对上述结果再次进行滤波,得到最终的加权融合计算结果。
5 仿真测试验证
采用仿真手段对融合算法进行测试分析,根据实际测量条件下的装备布站情况,模拟6 台雷达测量数据,满足测量数据在弹丸飞行轨迹全程覆盖,在不同飞行距离段落内数据质量存在差异。雷达测量数据仿真具体情况如表1 所示,雷达数据仿真曲线及航迹融合结果曲线如图2所示。
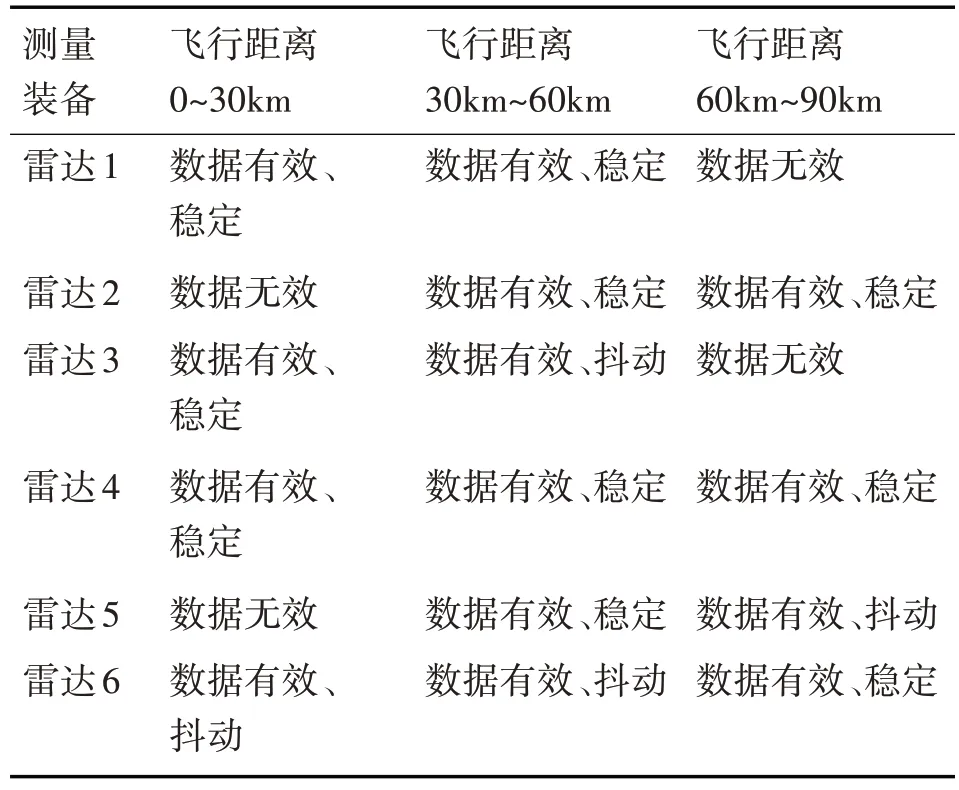
表1 雷达测量数据仿真
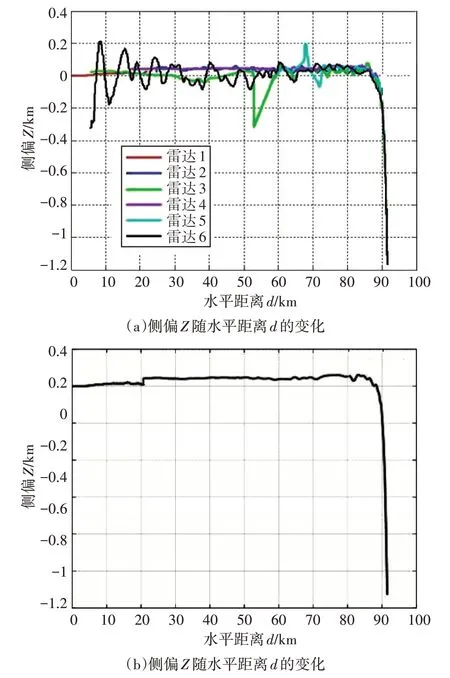
图2 雷达数据仿真曲线及航迹融合结果曲线
通过仿真结果可知,该融合算法能够根据测量数据实际情况,在不同飞行段落内有效剔除抖动数据,排除不稳定数据对融合权值系数计算的影响,融合结果曲线抖动较小、连续稳定。
6 结语
本文针对高速弹丸目标在海上射击时,沿海测量受布站限制、目标特性不明显、多类型装备接力测量等实际情况,提出基于数据间支持度的数据融合算法,计算各测量数据间的相互支持程度,有效排除不稳定数据干扰,得到各测量数据的融合权值,完成信息融合计算。通过仿真数据测试验证,该方法切实可行,能够得到完整的、稳定的目标航迹信息融合处理结果。并可为远程目标多类型测量装备协同工作、接力测量的研究提供参考意义。
