弹道跟踪数据野值剔除方法性能分析
2018-09-07侯博文王炯琦周萱影何章鸣
侯博文,王炯琦,2,周萱影,李 冬,何章鸣,2
(1.国防科技大学理学院,长沙 410072; 2.北京控制工程研究所,北京 100086;3.中国人民解放军91550部队94分队,大连 116023)
0 引言
高精度弹道跟踪数据是分析和鉴定航天飞行器的制导系统、再入系统、测控系统及其它分系统的重要基础。然而,无论采用何种弹道跟踪体制对飞行器进行跟踪测量,跟踪或测量设备的冲击、振动、系统故障、环境干扰,或操作人员的误判等都会造成过失误差,引起异常值。测量数据集合中偏离正常数据所呈现趋势的数据点称为野值[1]。野值的存在会严重影响弹道跟踪数据的精度,甚至歪曲测量体系真相,在需要高精度弹道跟踪数据的场合是不允许的。因而,必须在弹道跟踪数据预处理中,检测、识别野值,并剔除或作必要的修正。
根据野值是否连续,可分为孤立型和斑点型野值[2]。根据弹道跟踪数据处理模式又可分为事后处理和实时处理。不同情况下跟踪测量数据的野值特征、表现形式、变化规律各不相同。目前已经有很多学者提出了不同的野值剔除方法[3-10]。传统的野值剔除方法[3](包括莱特准则、罗曼诺夫斯基准则、格拉布斯准则及肖维勒准则等)对于弹道数据的统计特性具有约束性,导致这些方法在使用时受限;自适应最小二乘法[4]对于孤立型野值具有较好的剔除效果,但没有讨论关于斑点型野值处理效果;中值滤波差分法[7]可有效剔除斑点型野值,但剔除效果不稳定,会出现数据失真或缺失的情况;外推拟合法[8]可有效剔除孤立型和斑点型野值,但斑点型野值剔除后会出现数据缺失;插值剔除法[9]适用于光学测量设备,在其他情况下效果并不显著。
本文对上述文献中提到的各种野值剔除方法进行了综述,从理论上分析了各种方法的优缺点,基于各野值剔除方法建立了相应的识别准则和剔除步骤,并通过仿真分析了其针对孤立型野值和斑点型野值的剔除能力,对比了各类野值剔除方法效果,为实际工程应用提供了理论与技术支撑。
1 事后数据野值剔除方法
弹道跟踪数据的事后野值剔除是指在导弹或火箭飞行试验后对弹道测量数据的野值剔除。
假设测量数据序列为y=[y1y2…yn]Τ,其可以表示为
(1)

由于飞行器的飞行数据一般是具有趋势的数据,因此事后野值剔除主要分为两步,即趋势剔除(包括真实信号特征提取、系统误差补偿等)和野值剔除。这里主要介绍野值剔除的方法。假设趋势剔除后的数据为x=[x1x2…xn]Τ,趋势剔除后的测量数据残差序列为v=[v1v2…vn]Τ。工程中常用的有以下几种事后野值处理准则。
1.1 莱特准则
莱特准则是最常用、最简单的判别准则,该方法以测量次数充分大为前提[11]。
原理:对于某一个测量序列,假设各测量值只含有随机误差,则根据随机误差的正态分布规律,其残差落在3σ以外的概率不超过0.3%。
准则:以3σ为野值判断阈值,其中σ为测量残差v的标准差。
步骤如下:
1) 计算剔除趋势后数据均值及标准差为
(2)
2) 计算各个时刻数据的残差,有
(3)
3) 将残差逐一与3σ进行比较,若
vi≥3σ
(4)

1.2 罗曼诺夫斯基准则
罗曼诺夫斯基准则又称为t检验准则,对于一批独立等精度测量数据中存在单个异常值的情况,是一种有效的识别方法[12]。
原理:根据抽样分布定理,按照t分布的实际误差分布范围来检测野值。
准则:根据样本确定的检测统计量与给定显著水平下确定的t检验系数进行比较,确定野值。
步骤如下:
1) 根据抽样分布定理,确定服从t分布的随机变量,有
(5)

1.3 格拉布斯准则
格拉布斯准则又称极大残差检验[14],是检测服从正态分布的单变量数据集中野值的方法。
原理:将测量值由大到小排序,依次进行野值剔除。
准则:确定构造统计量的分布,根据预设的显著性水平剔除野值。
步骤如下:
1) 将xi按大小顺序排列成顺序统计量x(i),满足
x(1)≤x(2)≤…≤x(n)
(6)
2) 构造统计量
(7)
3) 取定显著性水平α,有
P(gn≥G(n,α))=α
(8)
其中格拉布斯确定了g分布的临界值[11],有
(9)

1.4 肖维勒准则
肖维勒准则以正态分布为前提,是一种剔除实验数据中野值的有效方法[15]。
原理:设在一个n次的等精度测量中,不出现vi>a的误差,那么概率P{vi>a}接近于0。当n足够大时,由大数定律,概率P≈m/n,其中m是vi>a出现的次数。因此可认为
m/n≃P{vi>a}→0
(10)
或
m≃nP{vi>a}→0
(11)
式中:m为整数。因此有
nP{vi>a}≤1/2
(12)
即最低限度应有
P{vi>a}=1-erf(k)=1/(2n)
(13)
式中:k=a/σ,k值可查表[16]获得。
准则:确定一个概率范围,其中心为一个标准正态分布的均值,在该范围之外的点即可判断为野值。
步骤如下:
1)计算数据残差vi。
2)剔除野值,如满足
vi>kσ
(14)
1.5 奇偶提取法
奇偶提取法,即将数据按照奇偶位置分为若干组(集)进行野值剔除[17]。
原理:原数据样本标准差误差较大,将原数据拆分成小样本数据集后,每个小样本数据集中野值个数减少,标准差更接近于真值。
准则:分组后的数据按照莱特准则进行野值剔除。
步骤如下:
1) 奇偶序列提取。对于数据x1,x2,…,xn按照奇偶位置分成两组,分别记为x1-O,x1-E;再进行第二次分组,得到x2-OO,x2-OE,x2-EO,x2-EE;以此类推,将数据x1,x2,…,xn分成2m组。

(15)
(16)
(17)
(18)
以此类推,根据需要选定分组次数m(根据精度设定),分成2m个小样本数据集,对每组都进行上述求均值和方差的过程。
3) 利用莱特判别准则进行野值检验和剔除。
4) 数组整合。
经过步骤1)~3)后,将剔除野值后的分组数据进行整合,得到完整的数据。
需要注意的是,在每组小样本数据集里可能存在第1个数据就是野值的情况,此时用第2个数据替代。
1.6 差分辅助中值滤波
在中值滤波的基础上借差分思想对数据进行野值剔除。
原理:对测量数据进行一次差分,可得
(ωi+1-ωi)+(δi+1-δi)
(19)
考虑野值差分结果为(δi+1-δi),对于斑点型野值,若野值点幅度相近,在差分数据中,野值点数据将只保留在当前窗口内的第1个野值数据,其余野值将会被差分消除。因此,斑点型野值会变为孤立型野值。孤立型野值可直接利用中值滤波方法进行剔除。
准则:对一次中值滤波后的观测数据进行一次差分,对差分后的数据再进行中值滤波,积分还原后进行野值判断。
步骤如下:
1) 对原始测量数据x进行中值滤波得到xmed,剔除外弹道测量数据中的孤立型野值。
2) 对xmed进行一次差分后,再进行一次中值滤波剔除野值。
3) 对差分后的数据进行积分,得到原测量数据。
4) 检测剔除后的数据是否还存在野值,如有,重复步骤1)~3)。
2 实时数据野值剔除方法
弹道跟踪数据的实时野值剔除是指在导弹或火箭飞行试验过程中,对弹道测量数据的野值进行实时检测与剔除[4]。
由于实时数据的获取会有延迟,所以实时数据野值剔除也主要分为两步,即数据外推和野值剔除,此外,还要求起始段数据无野值情况。

2.1 五点线性预报野值剔除法
五点线性预报法分为差分检验、线性预报。首先用求一阶差分和四阶差分的方法对数据进行合理性检验,发现并剔除明显的野值点,并按五点线性预报公式补点。
原理:利用最小二乘法对数据进行预报,与实测数据做对比,从而实现野值剔除。
准则:将测量数据残差与预先确定的野值检测门限做对比并进行检测。
步骤如下:
1) 对跟踪数据进行一阶差分,其表达式为
Δ1yi=yi+1-yi
(20)
用四阶差分检验法进行初始检验,找出一组合理点。
2) 数据四阶差分值
Δ4yj=yj-4-4yj-3+6yj-2-4yj-1+yj
(21)
式中:j≥5。取门限值M1(经验值为17σ,σ为测量数据的精度),判断Δ4yj≤M1是否成立,若是,则为一组合理点;否则,令j=j+1,继续进行四阶差分检验。

(22)


2.2 α-β-γ滤波器野值剔除法
原理:利用α-β-γ滤波器对数据进行预报,与实测数据做对比,从而实现野值剔除。
准则:将测量数据残差与预先确定的野值检测门限做对比并进行检测。
步骤如下:
(23)
式中:u,s为滤波器的中间变量。
2) 从第4点开始按照式(24)、(25)递推计算,有
(24)
(25)

3) 对测量数据序列进行一步预测,若实测值与预测值之差的绝对值小于某门限值,此数据为合理值,反之为野值。
(26)
式中:M为门限值,一般为正常训练数据预测残差精度的3倍。
2.3 基于稳健估计的自适应门限法
由于数据中存在的野值会影响样本标准差的确定,结合稳健估计原理,实时确定野值检测门限,从而实现跟踪数据的野值实时剔除[18]。

(27)
式中:ψ(·)为影响函数;β为待定参数。适当选择ψ(y)和β可对数据中异常值加以抑制。
2)β公式的推导。选择Huber的ψH(y0)函数作为影响函数,有
(28)
(29)
因为异常值不多且可用CΗσ代替,故有
(30)

(31)

因此取不同的CH有不同的β,在实时数据处理过程中一般取CH=1.5,此时β=0.778 5。又有
(32)
于是有
(33)
(34)
式中:∑1为满足Δyi≤CHσ的观测数据求和;NH为观测数据中Δyi>CHσ的数据个数;n为窗口大小,通常取16~30。由于实测数据是动态的,故采用滑动数据窗口。
准则:将测量数据残差与实时更新的野值检测门限做对比,实现野值检测和剔除。
步骤:
2) 判断是否满足Δyi≤CHσ,若满足,则yj+1为合理值;否则,为野值,用预测值代替。
2.4 基于匹配测元的方法
弹道跟踪数据中存在匹配关系的测元,如某一个测元是另一个测元的微分(或积分),根据某一测元的正常数据来剔除另一测元测量数据的野值。
(35)
式(35)为匹配测元之间的关系,可改写为
(36)
在实际测量数据中,由于系统误差和随机误差,有
(37)
(38)
准则:测量和匹配数据的残差与设定的野值检测门限做对比,实现野值检测和剔除。
步骤如下:
1) 选取连续n个点的匹配测元数据,计算
(39)
并进行统计,有
(40)
若ΔL(t1)>3σ,则R(t1)为野值点,其中σ为数据精度。记野值点个数为l,则有
(41)
2) 以n点为窗口滑动,按照步骤1)进行数据检测。
3 仿真验证
针对实际弹道跟踪测量存在的孤立型野值和斑点型野值,分别就事后处理和实时处理2种模式,进行野值剔除的仿真计算。为了更好地描述每种方法的性能,定义野值剔除率为
(42)
3.1 事后数据野值剔除仿真
用计算机仿真出200个服从均值为0,方差为2的剔除趋势后的数据点,在第96~105个点间加入常值为10的野值(斑点型野值),在第50、70、130、150个点分别加入常值为-15、-10、15、12的野值(孤立型野值)。为更好地体现各方法的性能,在第151~160个点间加入了10sin(i)的斑点型时变野值,i为时间。分别用第2节中的6种方法进行野值剔除,显著性水平设置为0.01,进行了10次仿真,取某一次仿真结果如图1所示。图1(a)~(d)中红线为野值检测阈值,蓝线为数据残差;图1(e)~(f)中红线为剔除野值后数据,蓝线为剔除野值前数据。
10次仿真的数据野值剔除率和误检点数统计结果见表1。
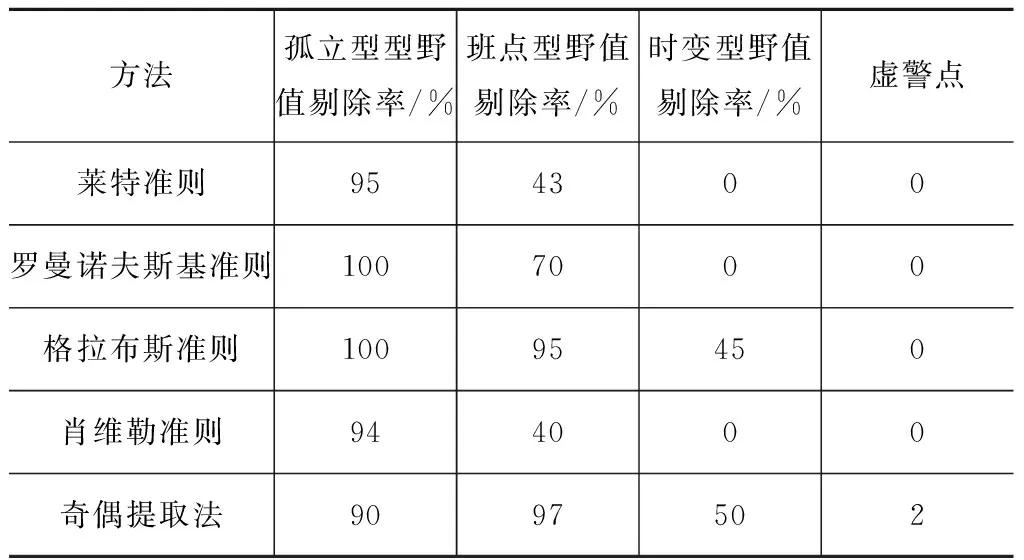
表 1 事后数据野值检测结果
差分辅助中值滤波法是直接将野值剔除,故无法判断野值检测结果。从图1(f)可看出,该方法在一定程度上可实现野值剔除,但该方法受数据本身波动影响较大,当原始数据出现较大波动时,野值剔除后的数据也会出现波动,效果不稳定。
综合表1中准则,结合仿真结果,得到各种方法对比结果见表2。
3.2 实时数据野值剔除仿真
设定二次多项式仿真弹道数据
y(t)=0.4×t2+5×t+220
(43)
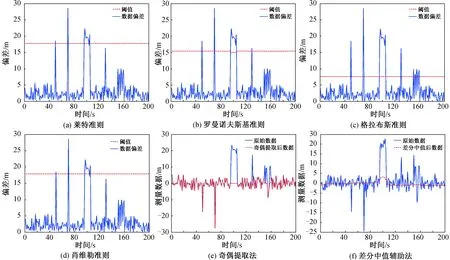
图1 事后数据野值剔除结果Fig.1 Results of off-line data outlier elimination
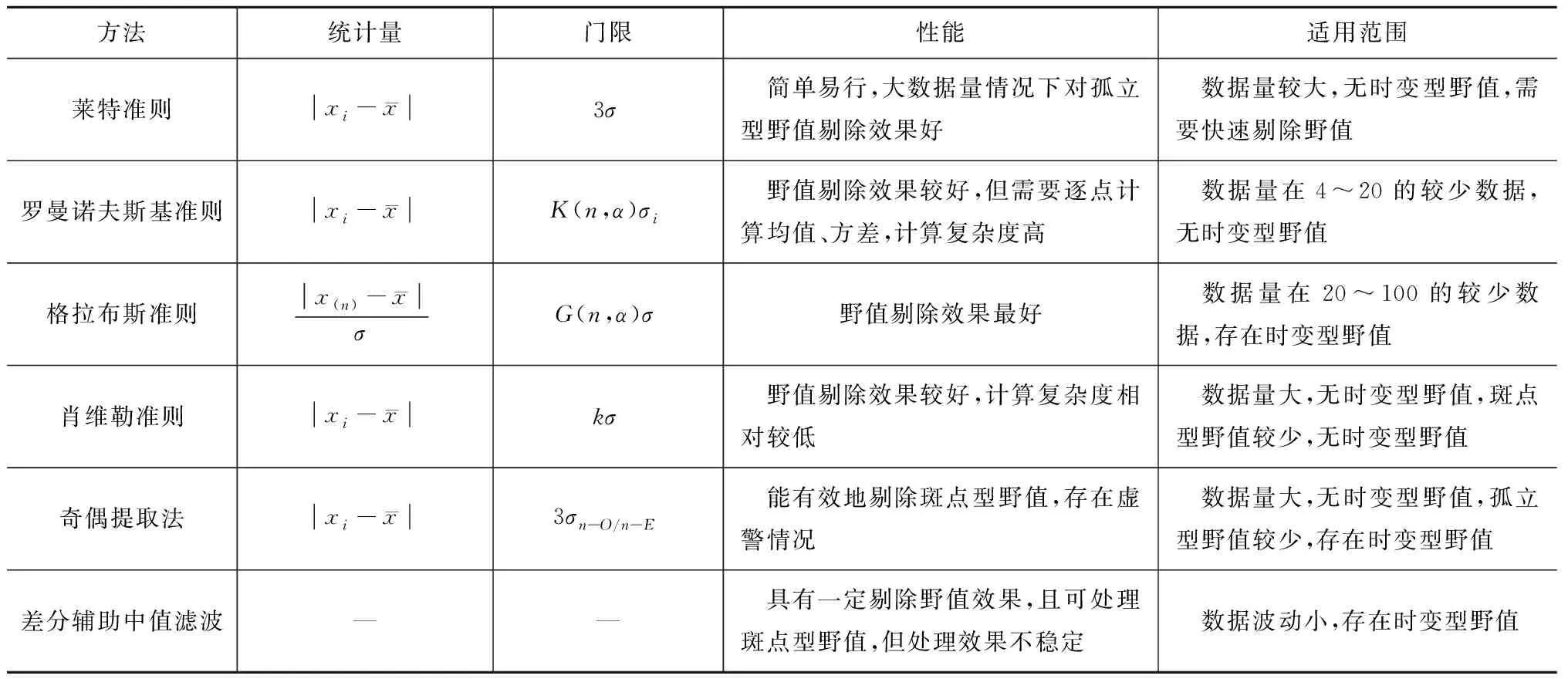
方法统计量门限性能适用范围莱特准则xi-x3σ 简单易行,大数据量情况下对孤立型野值剔除效果好 数据量较大,无时变型野值,需要快速剔除野值罗曼诺夫斯基准则xi-xK(n,α)σi 野值剔除效果较好,但需要逐点计算均值、方差,计算复杂度高 数据量在4~20的较少数据,无时变型野值格拉布斯准则x(n)-xσG(n,α)σ 野值剔除效果最好 数据量在20~100的较少数据,存在时变型野值肖维勒准则xi-xkσ 野值剔除效果较好,计算复杂度相对较低 数据量大,无时变型野值,斑点型野值较少,无时变型野值奇偶提取法xi-x3σn-O/n-E 能有效地剔除斑点型野值,存在虚警情况 数据量大,无时变型野值,孤立型野值较少,存在时变型野值差分辅助中值滤波—— 具有一定剔除野值效果,且可处理斑点型野值,但处理效果不稳定 数据波动小,存在时变型野值
式中:y(t)为位置数据;t为时间。共设200个采样点,采样时间间隔为0.05 s,野值与事后处理仿真设定相同,共进行10次仿真,取某一次仿真结果如图2、3所示。图2中红线为检测门限,蓝线为预测残差;图3中红线为剔除野值后数据,蓝线为剔除野值前数据。
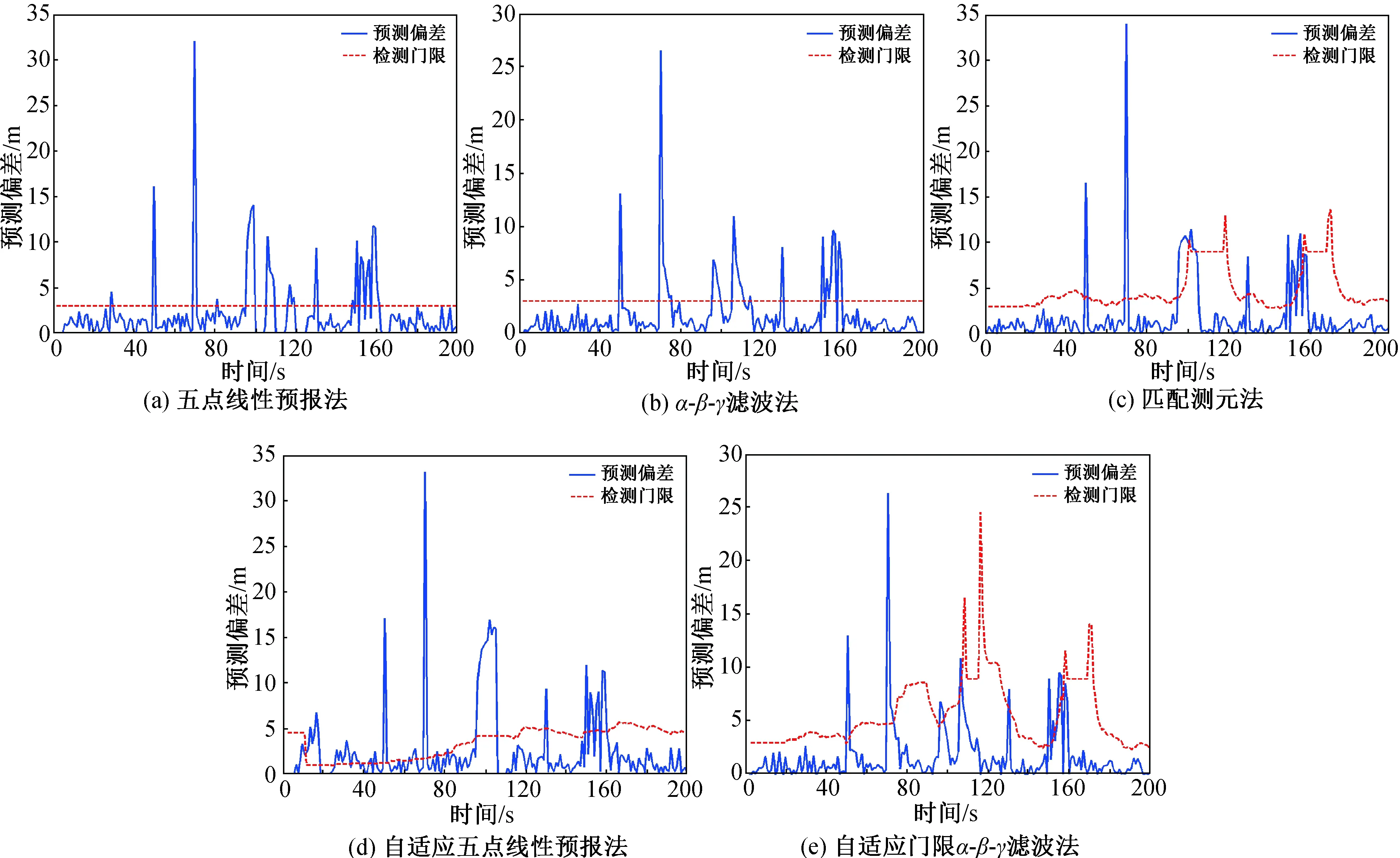
图2 实时数据野值检测结果Fig.2 Results of on-line data outlier detection
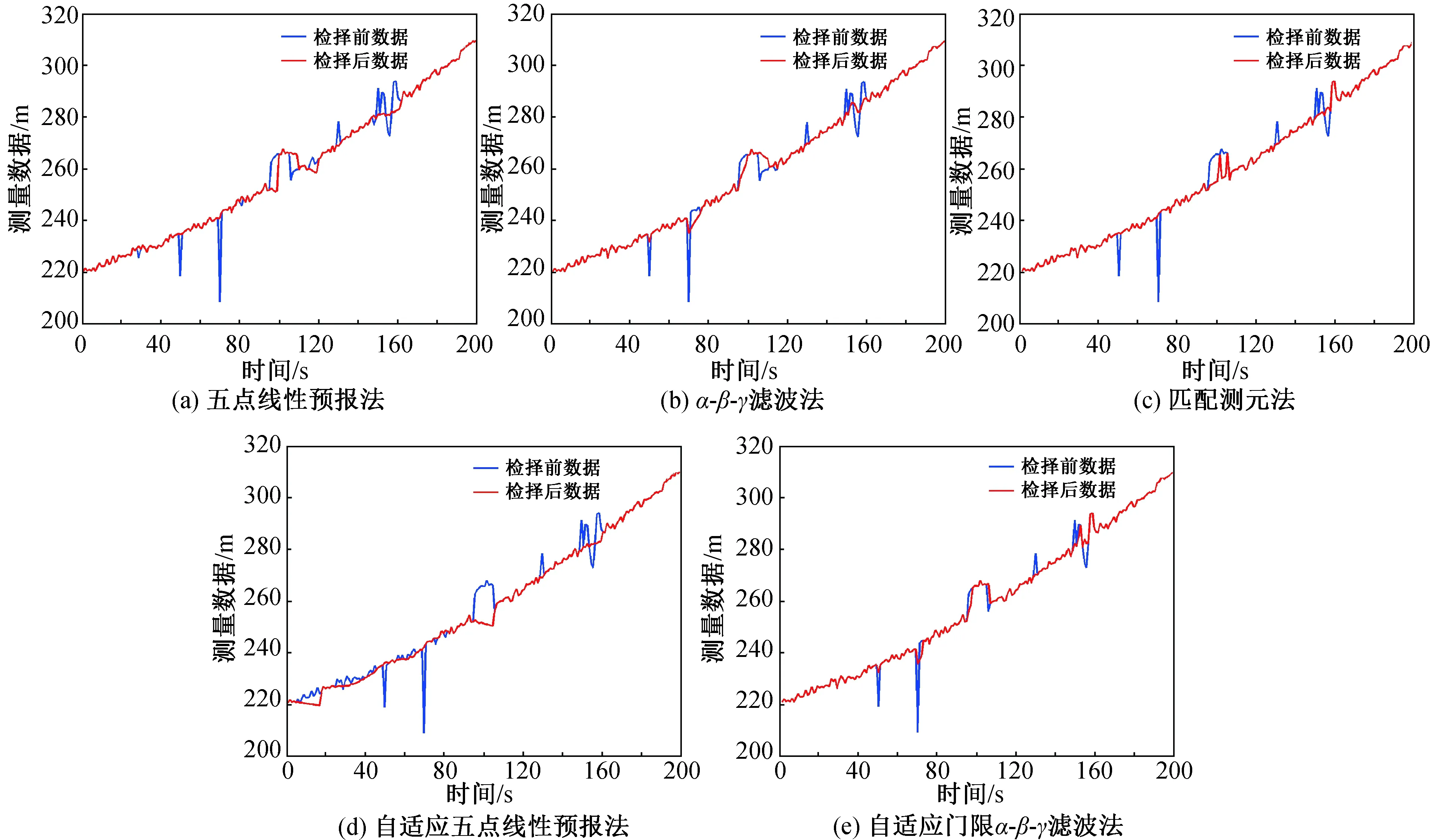
图3 实时数据野值剔除结果Fig.3 Results of on-line data outlier elimination
由于实时野值剔除方法对计算效率有较高的要求,因此几种方法的时间复杂度和仿真运算见表3。
综合以上几种实时数据处理方法,并结合图2、3及表3可得各种方法对比结果,见表4。

表3 实时数据野值检测结果
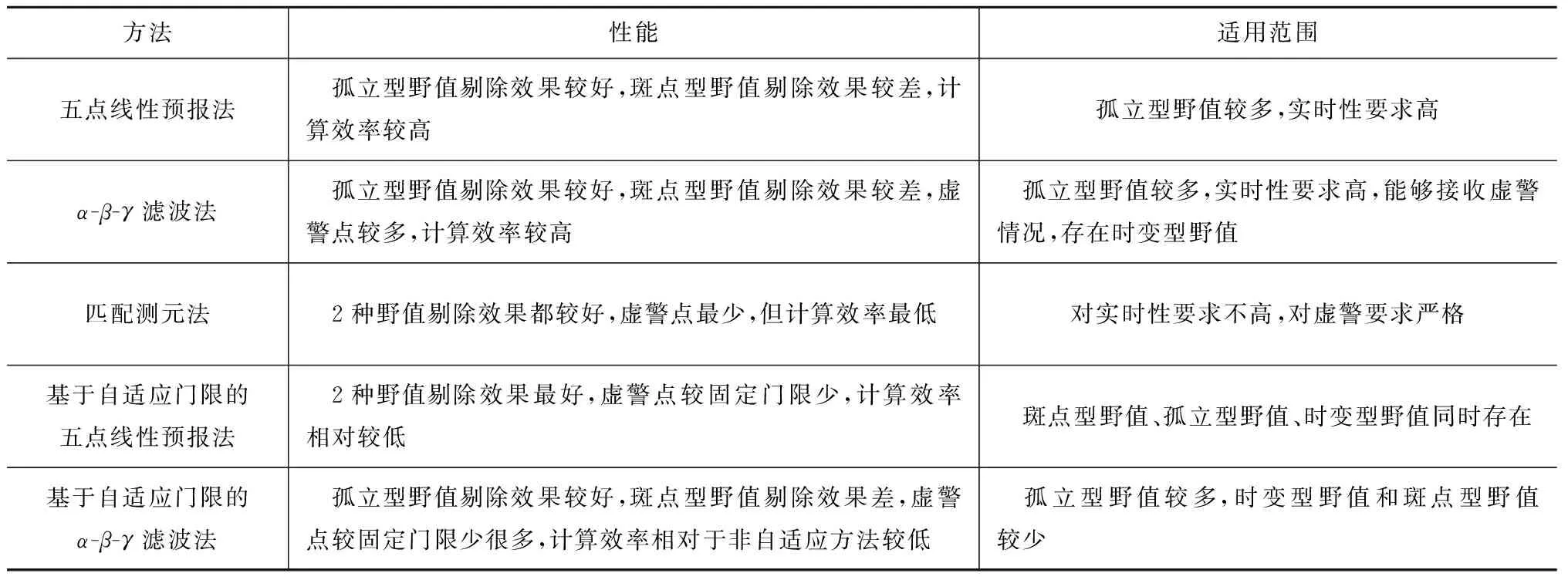
表4 实时数据野值剔除方法效果对比
4 结束语
野值剔除结果会直接影响弹道跟踪数据处理的精度。本文结合弹道数据事后处理和实时处理2种模式,对常见的,用于弹道跟踪数据的野值剔除方法进行了综述。通过理论分析和仿真计算表明:不同的野值剔除方法对野值的剔除效果不同。在事后数据野值剔除中,罗曼诺夫斯基准则对斑点型野值和孤立型野值的剔除效果较好,但需要以牺牲计算效率为代价;肖维勒准则对于斑点型野值剔除效果较好,且计算效率高;莱特准则在数据量较大情况下对斑点型野值剔除效果较好;格拉布斯准则对于孤立型野值和斑点型野值剔除效果最好;奇偶提取法对于斑点型野值和时变型野值剔除效果较好;差分辅助中值滤波法在一定程度上具有剔除野值的作用,但效果不稳定。在实时数据野值剔除中,五点线性预报法比α-β-γ滤波法好,自适应门限方法比固定门限方法好,主要体现在虚警点少,剔除效率高。匹配测元方法的野值剔除效果仅次于基于自适应门限的五点线性预报法,且虚警点最少,但时间复杂度较高,实时性相对较差。当孤立型、斑点型、时变型野值都存在时,基于自适应门限的五点线性预报法能较好地实现野值剔除功能。
综合比较可知:在事后处理中,对孤立型野值,罗曼诺夫斯基准则和格拉布斯准则可有效剔除;对斑点型野值,格拉布斯准则的剔除效果最好;对时变型野值,格拉布斯准则和奇偶提取法都能实现一定程度的剔除。考虑到各种方法的适用性,当弹道数据量较大时,对弹道数据的孤立型野值剔除也可选择莱特准则;对斑点型野值和时变型野值可选择奇偶提取法;在实时处理中,各种方法都能有效剔除孤立型野值,出于实时性要求,选择五点线性预报法最佳;基于自适应门限的五点线性预报法对斑点型野值的剔除效果最好,效率最高;α-β-γ滤波法对时变型野值的剔除效果最好;如果3种野值同时存在时,采用基于自适应门限的五点线性预报法最合适。
