融合U-model的四旋翼无人机自抗扰控制研究
2023-10-18龚格格李壮举
龚格格,李壮举
(北京建筑大学 电气与信息工程学院,北京 100044)
1 引 言
近年来,随着飞行器控制、微电机系统等多种技术的进步,四旋翼无人机在军民领域均得到了爆发式的发展[1].四旋翼无人机具有重量轻、速度快、抓力强、成本低的特点,可以实现精准定位,还可提升军事作战效率,降低伤亡.因此,研究四旋翼飞行控制具有很高的科研价值[2].
四旋翼无人机是一个典型的多输入多输出、非线性、强耦合的欠驱动系统,其飞行控制的速度和精度一直是研究热点[3].目前,已有多种控制算法应用在飞行器控制中,如:PID控制[4]、滑模控制[5]、反步法[6]、自抗扰控制[7]等.在实际飞行时,机身的旋转电机在高速旋转时会导致四旋翼数学模型发生变化,还会遇到不同程度的扰动[8].为了克服飞控难点,需要设计一种高性能的控制器,能够减少输入输出之间的相位滞后,提升响应速度.
自抗扰控制[9]是韩京清教授在总结PID控制的优缺点基础上提出的,可有效控制非线性、欠驱动的复杂系统.除此之外,ADRC可以不依赖精确模型,将变量间的高度耦合视为扰动进行补偿,在四旋翼无人机飞控系统中有实际应用意义[10].不少研究学者针对ADRC做出改进,例如:周涛等人[11]为补偿不确定性扰动,提出一种坐标方向速度的线性自抗扰控制方法.刘子龙等人[12]提出一种基于反步积分-迭代学习控制和自抗扰控制的位置-姿态控制算法.Niu T[13]等提出一种基于非线性自抗扰控制器的纵向俯仰角控制系统,用于解决无人机轨迹跟踪系统过于依赖精确数学模型的问题.余小燕等人[14]利用全局快速终端滑模控制技术优化自抗扰控制系统中非线性误差反馈控制律的功能.上述文献对ADRC都进行了不同程度的改进,然而忽视了相位滞后对于控制器响应速度和系统稳定性的影响.对于一个相对阶数为n的系统,控制信号u必须通过n个积分器来影响系统的输出y,这会导致输入输出之间存在相位滞后,从而影响控制器的性能.
U-model控制[15]是由朱全民在2002年提出的,其原理是得到一个非线性控制对象的动态逆模型,使得系统输入输出关系转化为“1”,即Gyu(s)=y(s)/u(s)=Gpi(s)Gp(s)=1.此时,Gyu(s)表示输出y和输入u之间的传递函数,Gpi(s)是被控对象的动态反演,Gp(s)是模型的传递函数[16].这样看来,y和u之间不存在相位滞后,通过设计融合U-model的控制器可以得到满足要求的闭环动力系统.因此,结合U-model控制可以避免y和u之间的相位滞后,加快系统响应速度.研究学者已提出一些基于U模型的控制器设计改进,例如:针对压电执行器的滞后现象,魏伟等人[16]将U模型和ADRC结合,用以提高纳米定位系统的速度和精度.徐凤霞等人[17]研究非线性对象建模问题时,利用通用的非线性U模型表达式,结合径向基神经网络PID控制算法完成在线辨识非线性被控对象,提高了控制系统的精度.李文清等人[18]为了控制一种单输入单输出系统,克服内部不确定参数和外部系统控制噪声的影响,提出结合U模型的滑模增强控制器,增强了控制器的鲁棒性.上述文献都将U模型和不同的控制器进行结合,取得了有效的改进.
为了减少甚至消除飞控系统的相位滞后,本文采用文献[16]提出的控制器设计方法,将U模型和ADRC融合,并运用在四旋翼无人机姿态控制系统.对于任何复杂系统的模型,利用ADRC中的ESO结构,闭环系统都可近似为一个积分器.基于U模型原理,再加上一个微分器,任何系统就可以动态变换为“1”.因此,可以有效降低对四旋翼无人机系统不确定模型的依赖性.通过设计控制律,让输入和输出之间等价,解决了飞控系统中的相位滞后问题,有助于加速和改善闭环系统的响应.通过理论分析和实验证明,融合U模型的自抗扰控制(UADRC)是有效改进的.
2 四旋翼飞行器建模
2.1 四旋翼数学模型
四旋翼数学模型是稳定飞行控制的前提,本文研究对象选用X型四旋翼飞行器,建立动力学模型.分别建立两个坐标系,即惯性坐标系和机体坐标系,如图1所示.惯性坐标系的轴平行于世界,原点和机体坐标系重合[19].四旋翼机体坐标系以飞机重心为原点,沿着飞机横纵竖轴确立.
四旋翼飞行器采用电机驱动,在机身周边对称分布着4个螺旋桨,通过电机转速控制无人机的运动[20].为了简化模型,通常假设飞行器的结构是刚性的,机构是完全对称的,并且忽略四旋翼桨叶因自身颤动而引起的物理效应.通过四旋翼飞行器的动力学与运动学方程以及欧拉定理建立了四旋翼飞行器的数学模型,如公式(1)所示.

图1 四旋翼机体示意图Fig.1 Schematic diagram of quadrotor body
(1)
式中:x,y,z为四旋翼地理坐标系下的空间坐标位置;ψ,θ,φ是机体相对于地理坐标系的3个姿态角,分别为偏航角、俯仰角、横滚角;Ix,Iy,Iz分别为飞行器绕 x,y,z轴的3个转动惯量;g为飞行器的重力加速度;m为飞行器质量;u1,u2,u3,u4为系统控制量,其与4个旋翼的转速关系分别为式(2)所示:
(2)
式中:kt是飞行器旋翼的升力系数;kd为飞行器的阻力系数;Ω1,Ω2,Ω3,Ω4表示飞行器无刷直流电机调控的4个旋翼转速值.
2.2 问题描述
四旋翼无人机是一种典型的非线性被控对象,通过电机转速控制飞行器的运动状态,构造了4个虚拟控制量U1-U4来控制其3个位置和3个姿态,完成轨迹跟踪控制.如图2所示,在四旋翼无人机实际飞行过程中,电机高速旋转影响升力/反扭力矩,从而使数学模型发生动态变化,对控制器的控制要求较高.除此之外,飞控系统内外部有不确定的干扰,例如:系统控制误差、变量耦合、阵风干扰等等,都会影响控制系统的稳定性.

图2 电机与螺旋桨执行机构图Fig.2 Motor and propeller actuator diagram
输入输出间相位滞后是控制器普遍存在的一种现象,严重降低了响应速度、精度,甚至使闭环系统不稳定.四旋翼无人机主要通过飞行轨迹实现跟踪控制,输入和输出之间的相位延迟会降低响应速度.为了使相位滞后最小化,可以不依赖精确模型,并且具有抗干扰能力,需要一种独立于滞后模型且能够有效地消除输入和输出之间的相位延迟的控制算法.在下一节中,本文将采用一个基于U-model的自抗扰控制器,改善四旋翼姿态角度控制.
3 四旋翼控制结构原理和位置环设计
3.1 四旋翼飞行器闭环控制原理
四旋翼无人机采用双闭环控制结构,通过内外环实现轨迹控制.如图3所示,外环为位置环控制器,控制3个位置变量;内环为姿态环控制器,控制3个姿态角度.本文采用的控制器改进算法针对姿态环控制,通过加快内环控制器的收敛速度,保证双闭环系统的稳定性.

图3 四旋翼控制系统结构图Fig.3 Control system structure diagram of quadrotor
结合控制结构图,四旋翼无人机控制结构原理描述如下:输入轨迹P=[xd,yd,zd]T,通过外环的位置控制通道,得到输入轨迹的控制量Pu=[Ux,Uy,Uz]T,结合数学模型得到控制量U1;给定偏航角ψd,结合数学模型解耦出另外两个姿态角度φd、θd,通过姿态环控制得到控制量U2~U4,从而实现6个自由度变量的闭环控制.解耦模块中涉及到位置量和姿态角度间的转换,数学关系如下:
(3)
3.2 位置环控制器设计
四旋翼位置环控制器主要控制3个方向的坐标位置,3个控制通道原理类似,在此以z轴为例.结合公式(1)可得z轴坐标位置的状态方程为:
(4)
式中:x1表示z轴坐标位置,x2表示z轴线速度,Uz为虚拟控制量.由上式可知z轴坐标控制为一阶系统,可采用经典PID控制器,其参数容易调节,满足位置环控制的要求.其余两个坐标轴通道类似,控制原理可定义为式(5):
(5)
z轴位置的PID控制原理图如图4所示.r(t)表示z轴给定位置的目标设定值,根据控制误差e(t)=r(t)-y(t),利用Kp、Ki、Kd这3个系数得到控制量u(t),分别是比例系数、积分系数、微分系数.得出虚拟控制量u(t),需要结合下一节的姿态环控制,最终得到系统的响应输出结果y(t),跟踪输出曲线可以看出控制效果.
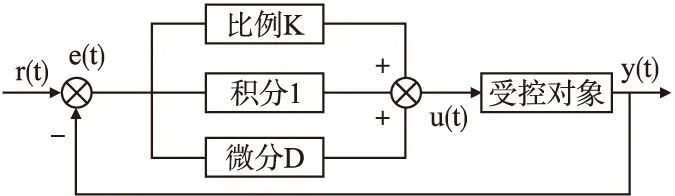
图4 z轴PID控制原理图Fig.4 PID control principle diagram of z axis
4 基于U-model的姿态环控制器设计
4.1 姿态环控制器设计
四旋翼姿态环控制器控制对象为3个姿态角度,控制器输入量分别为ψd、φd和θd,输出量为U2、U3和U4,其控制通道原理类似,在此以偏航角为例.根据公式(1)可得:
(6)
分析式(6)和偏航角的动力学模型可知,偏航角控制为二阶系统.针对二阶姿态环控制系统,为减小系统复杂度,设计简化的一阶ADRC控制器.考虑如下一阶系统:
(7)
其中:b0为控制增益;u为控制输入信号;f为系统未知总扰动;y为系统输出.
在LADRC中,有二阶线性ESO:
(8)
其中:z1和z2分别为估计y和f的观测值.β1,β2是ESO的增益系数.根据带宽参数化取值规则[21],令β1=2ω0,β2=ω02(ω0是可调节的观测器带宽).估计误差受时变干扰的限制[22],以下定理描述了估计误差和观测器带宽之间的关系.
根据定理[22]:如果总扰动的变化率有界,则存在一个观测器带宽ω0,使得ESO的估计误差在有限的时间内是有界的.此外,估计误差的边界与带宽成反比.
设总干扰估计误差为ε=f-z2,且系统输出估计误差为ε1=y-z1.基于ESO,定义下式:
(9)
其中:u0是u的过渡值.在LADRC中,存在u0L=Kp(r-z1)=ωc(r-z1)[18].
将式(9)代入一阶系统(7)可得到:
(10)
显然,对于任何模型,闭环系统都近似为一个积分器,这是U-model控制的原理.然后,再加上一个微分器,任何系统就可以动态变换为“1”.因此,通过预先设定的模型转换公式(9)可获得所需的闭环动力学模型.


图5 UADRC的等效结构图Fig.5 Equivalent structure diagram of UADRC
结合U模型原理,引入一个微分器,如图7所示,如果不存在总干扰估计误差,即e=0,对于控制律u*来说,控制模型即等效为“1”,即y=u*.这样,系统输出y和输入u之间就没有相位滞后,大大提高了响应速度.

图7 控制对象的等效结构图
Fig.7 Equivalent structure diagram of control object
(11)
其中:k>0和ρ>0是可调参数.
结合U-model的UADRC控制结构如图7所示,设计步骤为:
步骤1.基于一阶系统构建二阶LESO,选择一个合适的观测器带宽,将任何系统近似转换为一个积分器.
步骤2.设计控制律u*,使得输入信号和系统输出等价,u*设计为式(11).

图8 融合U-model的UADRC控制结构图Fig.8 UADRC control structure diagram integrated with U-model
步骤4.根据图8得出模型的控制量u如式(12)所示:
(12)
融合U-model的UADRC控制结构如图8所示,与四旋翼无人机偏航角控制通道对应关系为:r表示偏航角设定值ψd,e*为控制误差,z1为偏航角ψd的观测值,z2为系统综合扰动观测值,u0是偏航角ψ控制量的过渡值,u表示偏航角ψ的虚拟控制量,y表示偏航角ψ的实际输出值,k和ρ均为可调节的参数.
4.2 闭环控制器稳定性分析
定理.式(11)中设计的控制律u*可以保证闭环系统是指数稳定的,如果可调控制参数满足ρ≥γ,γ=2ω0σ,则控制误差e*在有限时间内收敛于零.这里,ω0是LESO 的观测器带宽,σ是LESO的估计误差的范围.
证明:对于控制误差e*,定义一个李雅普诺夫函数为式(13):
(13)
对函数求导得:
(14)
(15)

因此,闭环系统是指数稳定的.此外:
(16)
(17)
可以看出控制误差e*在有限时间内收敛于零.
5 仿真实验分析
5.1 仿真实验平台搭建
本次实验基于Matlab2019/simulink平台进行仿真,按照四旋翼飞行器数学模型搭建被控对象仿真模块,采用PID控制器对四旋翼的3个坐标位置进行跟踪控制,再分别采用LADRC和UADRC对3个姿态角度进行控制实验.由于控制6个自由度变量存在高度耦合特性,结合四旋翼数学模型,设计6个单独的控制通道,以实现解耦.

表1 四旋翼飞行器参数表Table 1 Quadrotor aircraft parameter table
本次仿真实验选取的四旋翼飞行器仿真参数如表1所示.
四旋翼位置环的3个通道原理和控制器设计类似,仍然以x位置示意说明.如图9和图10所示,分别为x轴位置simulink内部模块图和x轴位置PID通道图,可以看出仅仅一个x向量就受到其他5个变量的影响,而且还受到电机转速的制约,因此耦合程度极高.仿真实验选取指定升力系数,便于仿真.
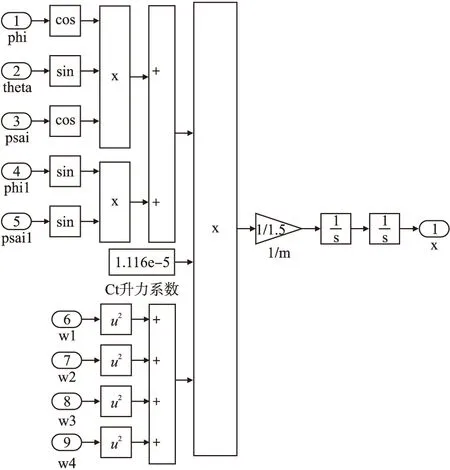
图9 x轴位置simulink内部模块图Fig.9 X-axis position simulink internal module diagram

图10 x轴位置PID通道Fig.10 X-axis position PID channel
四旋翼姿态环的3个通道均设置UADRC控制结构,如图11和图12所示为滚转角通道的U模型封装模块和内部结构图,参数设置如图所示为:k=2,ρ=10,b0=0.95.

图11 UADRC封装模块图Fig.11 UADRC package module diagram
仿真实验输入数据为:给定轨迹坐标为(x,y,z)=(8,10,6)/m;偏航角0.2rad即11度.设定运行时间T=100s,得到3个位置变量和3个姿态角的跟踪动态响应曲线图.
5.2 仿真实验结果分析
为了对比看出UADRC对四旋翼无人机轨迹控制系统的影响,采用3种控制算法进行仿真实验.位置环通道均保留经典PID控制,姿态环分别采用PID、ADRC和UADRC 3种控制方法,得出跟踪响应曲线图.在此,位置环和姿态环3个通道原理类似,以z轴和偏航角为例说明.针对四旋翼无人机双闭环控制结构,通常采用加快内环的收敛速度,实现内环(姿态环)收敛速度快于外环(位置环),从而保证双闭环控制系统的稳定性.除此之外,为了验证UADRC的抗扰性能,实验在小扰动状态下进行.在姿态环加入振幅为0.1的正弦波,来模拟实际飞行中遇到的扰动,得到响应的跟踪曲线对比图.

图12 UADRC的simulink仿真图Fig.12 Simulink simulation diagram of UADRC
小扰动状态下,四旋翼无人机z方向位置的跟踪曲线对比图如图13所示,性能指标表如表2所示.通过仿真实验结果可以得出,采用UADRC控制的上升时间和调节时间最短,分别只有11.2s和23s,而PID的上升时间需要15s、调节时间需要30s.位置环控制属于一阶系统,控制难度较小,因此控制响应曲线较为平滑,且PID和ADRC控制效果基本持平.UADRC控制的响应速度得到明显加快,超调量虽然为13.3%,但是后续的曲线平滑,可以实现稳定控制.

图13 扰动下四旋翼z方向对比曲线图Fig.13 Z-direction comparison curve of quadrotor under disturbance

表2 z方向对比曲线性能指标表Table 2 Performance index table of z direction comparison curve
如图14所示为小扰动下四旋翼偏航角通道对比响应曲线图,表3为对比性能指标表.通过仿真实验数据可以看出:UADRC的上升时间仅需要1s,PID需要3s,ADRC需要2.5s;UADRC的调节时间只需要6s,PID需要16s,ADRC需要13s.因此,证明了UADRC控制器确实可以通过减少输入输出之间的滞后,大幅提升响应速度.观察超调量的数据可以得出:UADRC的超调量为17.1%,PID的超调量为25%,ADRC的超调量为17.1%,且UADRC的后续曲线呈现平滑跟踪,PID和ADRC仍在小扰动范围内波动.因此,UADRC在四旋翼无人机姿态角度跟踪控制系统中具有良好的效果,响应速度得到加快,稳定性也可以得到保障,对于实际应用具有可参考价值.
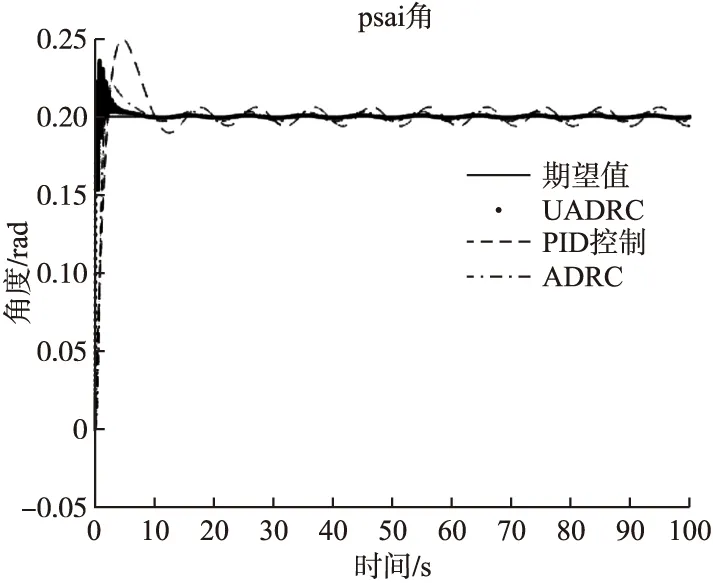
图14 扰动下四旋翼偏航角对比曲线图Fig.14 Deviation angle comparison curve of quadrotor under disturbance
四旋翼无人机轨迹跟踪控制中,姿态环为二阶系统,采用一阶UADRC便可得到优异的控制效果,证明了UADRC控制器的有效性.通过仿真对比实验和抗扰性能验证,可以得出以下结论:
1)UADRC确实可以减少输入输出之间的相位滞后,加快姿态环控制器响应的速度;

表3 偏航角对比曲线性能指标表Table 3 Performance index table of yaw angle comparison curve
2)基于UADRC控制的四旋翼无人机双闭环结构中,姿态环明显快于位置环响应速度,双闭环结构的稳定性得到保证;
3)在模拟的小扰动状态下,融合U模型的UADRC控制器能够控制在小幅度的超调范围内,且可以保障后续的稳定持续跟踪控制.
综上所述,经过控制器改进后,四旋翼控制的速度和精度得到提升,能够快速准确的调节机身的姿态角,控制器能够稳定的实现四旋翼无人机的飞行轨迹跟踪控制.
6 结束语
本文提出基于U-model的自抗扰控制算法UADRC,并将其用于四旋翼姿态环控制系统.首先分析四旋翼数学模型,构造了解耦后的六通道、双闭环四旋翼无人机轨迹跟踪控制器,对比3种不同控制算法的控制响应结果,验证UADRC控制器的优越性.在小扰动下进行模拟干扰的仿真实验,验证UADRC的抗干扰能力.UADRC结合了U模型和原始ADRC控制的优点,响应曲线的上升时间短、超调量小、鲁棒性强,大大的提高了控制器的性能指标,输入输出之间的相位滞后得到改进.从仿真实验数据表明,UADRC动态响应跟踪结果更为出色,为实现四旋翼无人机的精准定位、实时控制提供了一个更好地解决思路.
