基于掩膜投影和双参数CFAR的圆周扫描GBSAR三维点云提取方法
2023-10-17申文杰王彦平
申文杰 郅 洁 李 洋 林 赟 蒋 雯 王彦平
(北方工业大学信息学院雷达监测技术实验室,北京 100144)
1 引言
地基合成孔径雷达(Ground-based Synthetic Aperture Radar,GBSAR)是一种新型高精度测量技术,通过在有限长度的轨道上运转来获取合成孔径雷达(Synthetic Aperture Radar,SAR)数据,具有非接触、全天候、设站灵活等优点,能够实时监测场景整体形变情况,相较于传统星载、机载平台更灵活,且造价更低廉。由于其重复运行精度高,可以进行高精度形变监测,现已被广泛应用于滑坡监测、桥梁和建筑物监测等领域[1-3]。
圆周扫描GBSAR 是将机载圆迹SAR 模式引入地基平台的一种新体制GBSAR,通过天线在竖直平面上旋转形成的二维圆形合成孔径,从而实现对监测视场的三维成像[4-6],能够在地形起伏、有高度的建筑物场景中准确提取三维信息,在陡峭地形测绘、城区测绘,以及目标探测和识别等方面受到广泛关注。
但是圆周扫描GBSAR 的曲线观测几何导致图像中存在强旁瓣的问题。在三维SAR 数据中,强旁瓣具有三维空间分布,扩散在整个数据中。因此,在不同的高度,强旁瓣可能会掩盖邻近弱目标的主瓣,从而导致目标点丢失,无法实现精确提取三维SAR图像中目标点云。
目前三维SAR 图像目标点云提取没有行之有效的方法。现阶段,二维SAR 图像目标检测发展成熟,双参数恒虚警率(Constant False Alarm Rate,CFAR)目标检测器是一种重要的算法。双参数CFAR 具有自适应门限检测能力,能够适应背景杂波的变化[7]。林肯实验室将双参数 CFAR 检测器从一维信号推广到二维,由此可以处理SAR 图像,受到广泛的关注[8-10]。因此,利用双参数CFAR 完成三维SAR 图像的目标点云提取是一个行之有效的解决思路。但是受强旁瓣在三维空间分布的影响,双参数CFAR 检测结果中存在大量的虚警。在具体应用中,该算法需要在三维像的不同高度逐层检测,受扩散的三维强旁瓣的影响,强旁瓣也会被检测出来,无法准确提取三维SAR图像中的目标点云。
针对上述问题,本文提出一种基于掩膜投影和双参数CFAR 的圆周扫描GBSAR 三维点云提取方法。该方法首先利用双参数CFAR 获得三视图掩膜,三视图掩膜进行投影得到三维掩膜,三维掩膜再与三维像取交集,利用掩膜从数据的三个维度分别对强旁瓣进行抑制,大大减少三维图像中强旁瓣的三维空间分布对目标检测结果的影响。然后,再对取交集提取的潜在目标区域应用第二次双参数CFAR 实现点云提取,在潜在目标区域进行目标检测,避免了不同高度的强旁瓣使邻近弱目标被掩盖而导致丢失目标点、检测出强旁瓣,在一定程度上提高了目标检测精度。基于本文方法的优势,可以更加准确的提取出三维建筑物点云。具体步骤如下,首先提取三维SAR 图像最大值投影的三视图,避免目标点丢失,在三视图上进行第一次双参数CFAR 检测,完成初级检测获取三视图掩膜。然后利用三视图掩膜投影,通过SAR 三维像取交集去掉空间位置旁瓣,得到潜在目标区域数据。最后进行第二次双参数CFAR 算法,对潜在目标区进行全局双参数CFAR检测,实现三维点云提取。
本文其余部分安排如下:第2 部分介绍双参数CFAR 目标检测算法。第3 部分介绍基于掩膜投影和双参数CFAR 的目标检测算法。第4 部分为实际数据实验,采用北方工业大学自研的圆周扫描GBSAR 获取的三维数据进行实验,采用目标光学图和激光雷达数据作为真值进行算法验证,并与经典的双参数CFAR 逐层检测算法对比点云提取结果。最后一部分为结论。
2 双参数CFAR目标检测算法
2.1 双参数CFAR原理介绍
双参数CFAR 算法采用了基于高斯背景假设的空心滑窗双参数CFAR检测器,其实质是利用滑窗内提取像素的均值来估计相应模型的杂波功率[11]。假设杂波背景服从高斯分布,则其概率密度函数为:
其中σ为标准差,μ为该分布均值,分布函数为:
其正态分布标准概率密度函数为:
则虚警概率Pfa可推公式:
该算法中目标检测是将图像中的每个像素点与检测阈值Ic进行比较,当像素点值Xi≥Ic时,判定为目标点;当Xi<Ic时,判定为杂波点。SAR 图像目标和背景的概率分布图如图1 所示,目标幅度x的统计分布为p(x);噪声、背景幅度x的统计分布为q(x);Ic是需要确定的阈值。
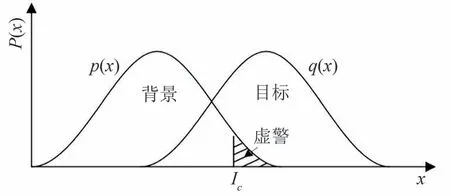
图1 目标和背景的概率分布图Fig.1 Probability distribution of target and background
虚警概率是指在检测目标过程中由于噪声的干扰使得将没有发生的事件错误地判决为发生的概率[12],雷达信号检测常采用奈曼-皮尔逊(Neyman-Pearson,NP)准则,统计假设检验将充分的统计量与自适应门限进行比较[13],NP准则的目的在于保证虚警概率一定的情况下,使检测性能达到最优。理论上,虚警的划分需要综合背景与目标的分布。实际中,目标单元数通常少于背景单元,故检测可采用次优方案,即判断待检测信号是否为背景即可。
2.2 双参数CFAR流程图
双参数CFAR流程图如图2所示。
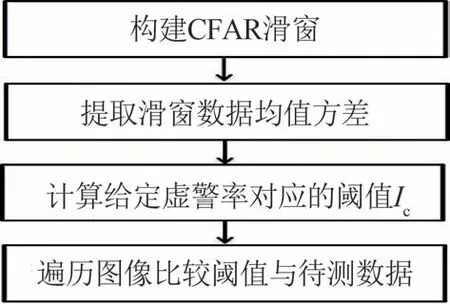
图2 双参数CFAR算法流程图Fig.2 Flow chart of Two-parameter CFAR algorithm
(1)依据待检测图像的尺寸大小,确定检测窗口的尺寸大小。经典的空心检测滑窗如图3 所示。其中包括目标区,保护区和背景区。
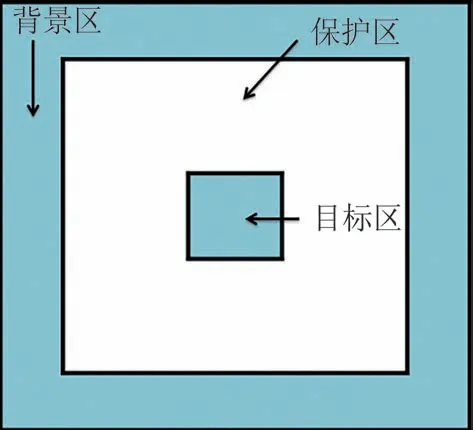
图3 空心检测滑窗Fig.3 Hollow detection sliding window
(2)根据滑窗选取的目标区周围适量的像素点值计算均值和方差。
(3)根据给定的虚警概率,以及所求均值和方差,计算阈值Ic。
(4)将滑窗在图像上逐点滑动,执行阈值计算,通过比较来判别滑窗的中心像素是否为目标点。
3 基于掩膜投影和双参数CFAR的目标检测算法
3.1 概述
圆周扫描GBSAR通常应用于大场景成像,由于其三维成像数据量庞大,场景复杂存在强旁瓣的问题,经典的双参数CFAR 逐层检测算法无法应用于三维SAR 图像中。因此本文在经典的双参数CFAR算法的基础上,提出一种基于掩膜投影和双参数CFAR 的圆周扫描GBSAR 三维点云提取方法,图4为算法流程图。
首先,在提取的三视图上应用第一次双参数CFAR进行检测,得到三视图掩膜,然后利用三视图掩膜投影,通过SAR三维像取交集获取潜在目标区域数据。然后,进行第二次双参数CFAR算法,在潜在目标区域数据应用全局双参数CFAR检测实现点云提取。
与经典的双参数CFAR 逐层检测算法相比,该方法可以直接应用于三维SAR 图像目标检测,并在强旁瓣的情况下有效提取出点云。
3.2 三视图提取
首先提取SAR 三维图像中三个维度最大值投影的三视图,投影示意图如图5。三视图取各个维度的最大值投影是为了使每个维度尽可能地保留全部目标点,避免由于目标点丢失导致后续目标点云提取存在误差等问题。
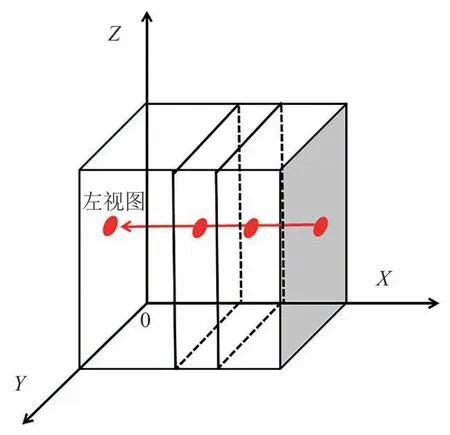
图5 三视图投影示意图Fig.5 Three-view projection diagram
三维数据S(x,y,z),求投影左视图SL=max(S,x0),其中x0是X轴的方向向量;求投影主视图SF=max(S,y0),其中y0是Y轴的方向向量;求投影俯视图ST=max(S,z0),其中z0是Z轴的方向向量。如式(7)所示。
3.3 第一次双参数CFAR
(1)开始进行第一次双参数CFAR 算法,在三视图上应用双参数CFAR 进行检测,获取三视图掩膜,如式(8)所示。分别为左视图掩膜ML(y,z),主视图掩膜MF(x,z)和俯视图掩膜MT(x,y)。
(2)利用三视图掩膜投影,再与SAR 三维像取交集,以去除背景及旁瓣,并筛选出潜在目标区域,示意图如图6所示。

图6 三视图掩膜投影示意图Fig.6 Three-view mask projection diagram
三视图掩膜投影获取三维掩膜I(x,y,z),如式(9)所示。
三维掩膜I(x,y,z)再与三维数据S(x,y,z)取交集,从而得到潜在目标区域数据f(x,y,z),如式(10)所示。
3.4 第二次双参数CFAR
(1)进行第二次双参数CFAR 算法,对三维掩膜提取的潜在目标区域数据f(x,y,z)进行全局双参数CFAR 检测。把提取的三维数据f(x,y,z)转成行向量A。根据行向量A中的数据求取均值和方差,再根据所求均值和方差以及恒定的虚警概率计算检测阈值Ic,遍历潜在目标区域数据f(x,y,z),判别滑窗的中心像素Xi是否为目标点,检测出更为精准的目标点,判别公式如式(11)。
(2)最后导出SAR图像最终的三维目标点云。
4 实验
4.1 实验数据参数介绍
本文所用数据集为北方工业大学自研的圆周扫描GBSAR采集获取的三维成像数据,系统如图7(a)。照射主目标为北方工业大学博远楼,次目标为操场围栏,雷达与目标的相对几何视角,见图7(b)。雷达安装在一个可旋转的支架上,这样雷达波束方向可以由软件控制,每次扫描时可以沿垂直面轨道进行360度照射成像,且每次扫描时间小于1分钟。
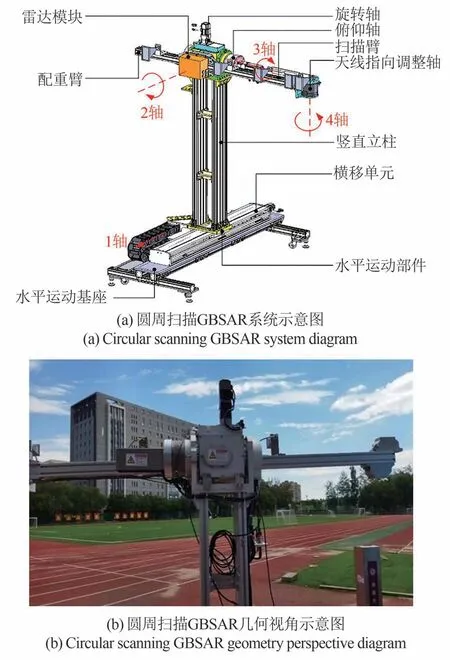
图7 圆周扫描GBSAR示意图Fig.7 Schematic diagram of circular scanning GBSAR
圆周扫描GBSAR系统参数如表1。

表1 实验参数Tab.1 Experimental parameters
4.2 本文方法的实验结果
4.2.1 三视图提取结果
提取SAR 数据中三个维度的最大值投影,三视图如图8。分别为(a)主视图,(b)俯视图和(c)左视图,三视图以灰度图显示,三视图中颜色越浅,表明该像素点值越接近目标值。图9为提取三视图中的俯视图与博远楼光学俯视图的对比结果,可以看出博远楼以及操场围栏的位置信息相匹配。验证了最大值三视图投影的可行性。
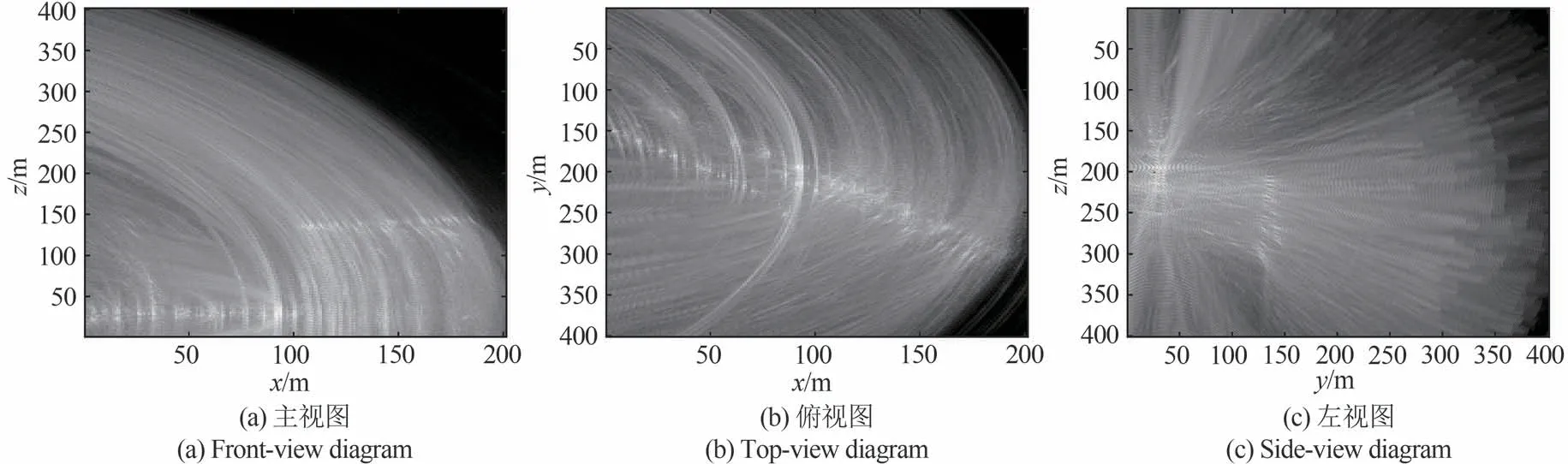
图8 三视图Fig.8 Three-view diagram
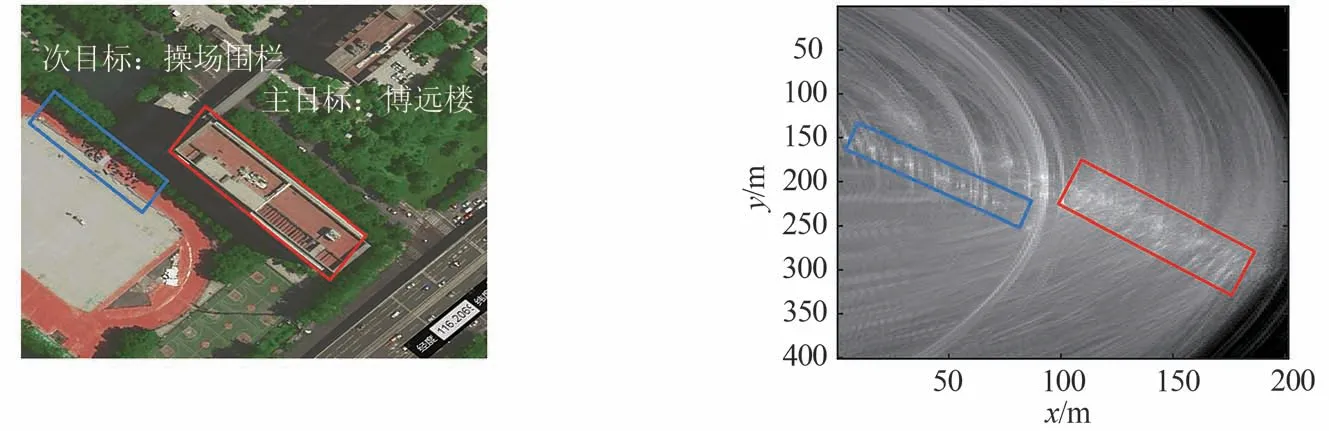
图9 俯视图与博远楼光学俯视图对比Fig.9 The comparison between the front view and the optical vertical view of Boyuan Building
4.2.2 第一次双参数CFAR步骤结果
在三视图上进行双参数CFAR 检测,得到三视图掩膜,如图10,分别为(a)主视图掩膜,(b)俯视图掩膜,(c)左视图掩膜。利用三视图掩膜投影获取三维掩膜,通过与SAR 三维像取交集,从而得到潜在目标区域数据,三维掩膜点云图像如图11。

图10 三视图掩膜Fig.10 Three-view masks
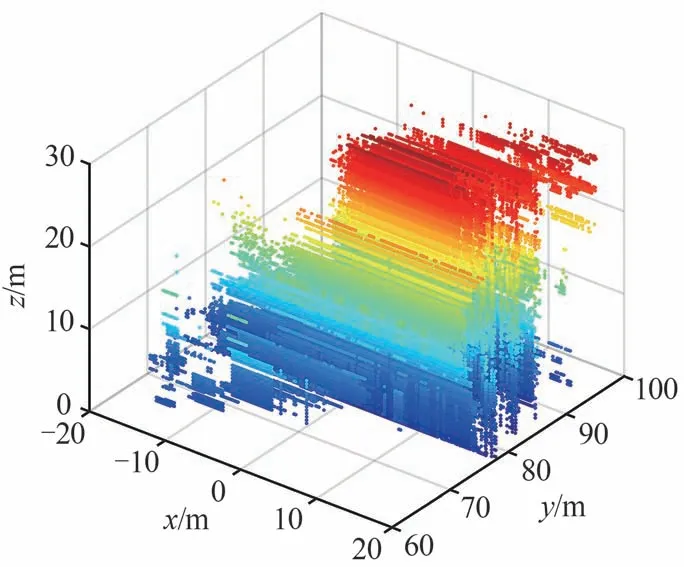
图11 三维掩膜点云图像Fig.11 3D mask point cloud image
在进行双参数CFAR 目标检测时,有两个因素直接影响目标检测结果,一个是检测滑窗尺寸,一个是设定的虚警率。滑窗选取与图像的分辨率和需要检测的物体尺寸有关,窗口太小导致目标信息统计不充分产生漏警,窗口太大导致计算量增大,本论文采用尺寸为201×401×401 的SAR 三维图像,根据经验参数人工调参设置为保护区外边长为50×50,保护区内边长尺寸为30×30,检测单元为1 个像素;虚警概率的选取直接影响计算阈值大小,阈值太大会导致目标被当成背景产生漏警,阈值太小又会导致把背景当目标,增加虚警,针对本文选取的SAR三维图像,根据经验参数人工调参选取虚警概率为0.1。
4.2.3 第二次双参数CFAR步骤结果
进行第二次双参数CFAR 算法,对掩膜提取的数据进行全局双参数CFAR 检测,筛选出更精确的目标点,实现SAR 图像最终的三维目标点云提取,如图12。图13 是博远楼门廊结构的雷达点云提取与光学、激光雷达对比图,其中(a)博远楼门廊结构的雷达点云提取,(b)为博远楼光学图,(c)为激光雷达点云图。三幅图像中红框对应的都是主目标博远楼门廊结构所在位置,经对比,博远楼门廊结构的雷达点云提取图像、博远楼光学图和激光雷达点云图像中博远楼门廊两条线状结构,长度与高度信息相匹配,因此基于掩膜投影和双参数CFAR 检测算法可以有效的提取出三维SAR图像的点云。
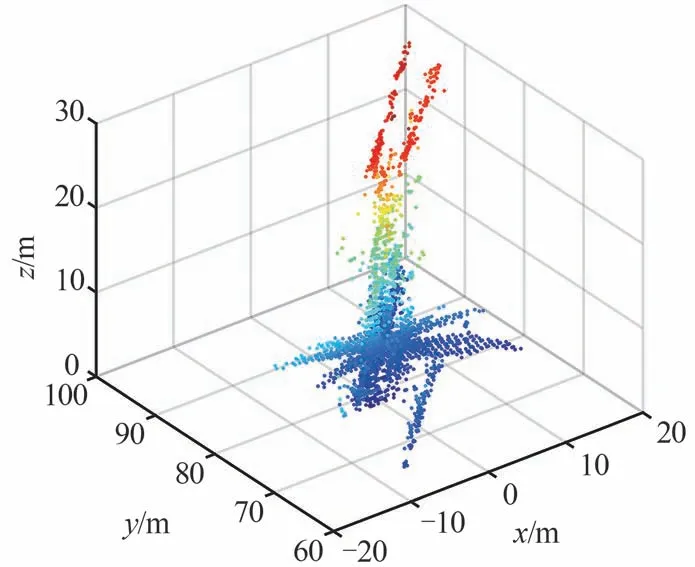
图12 三维目标点云图像Fig.12 3D target point cloud image
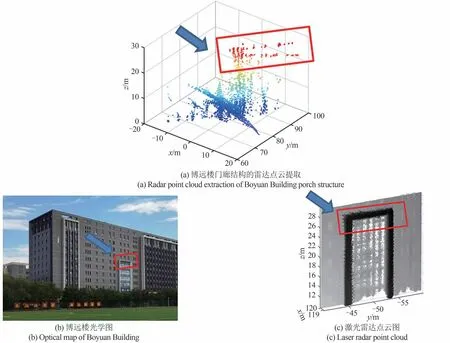
图13 博远楼门廊结构的雷达点云提取与光学、激光雷达对比图Fig.13 Radar point cloud extraction and optical and laser radar comparison map of Boyuan Building porch structure
4.3 实验结果性能对比
在相同数据集与参数的情况下,分别用经典的双参数CFAR 逐层检测算法和基于掩膜投影和双参数CFAR的检测算法在三维SAR数据上进行目标检测。三维点云视角图对比结果如图14,(a)为经典的双参数CFAR 逐层检测算法检测后提取的点云,(b)为基于掩膜投影和双参数CFAR 的检测算法提取的点云。可以明显看出基于掩膜投影和双参数CFAR 的算法检测后的点云中目标区域基本完全保留,且图像中旁瓣更少,目标更加清晰。
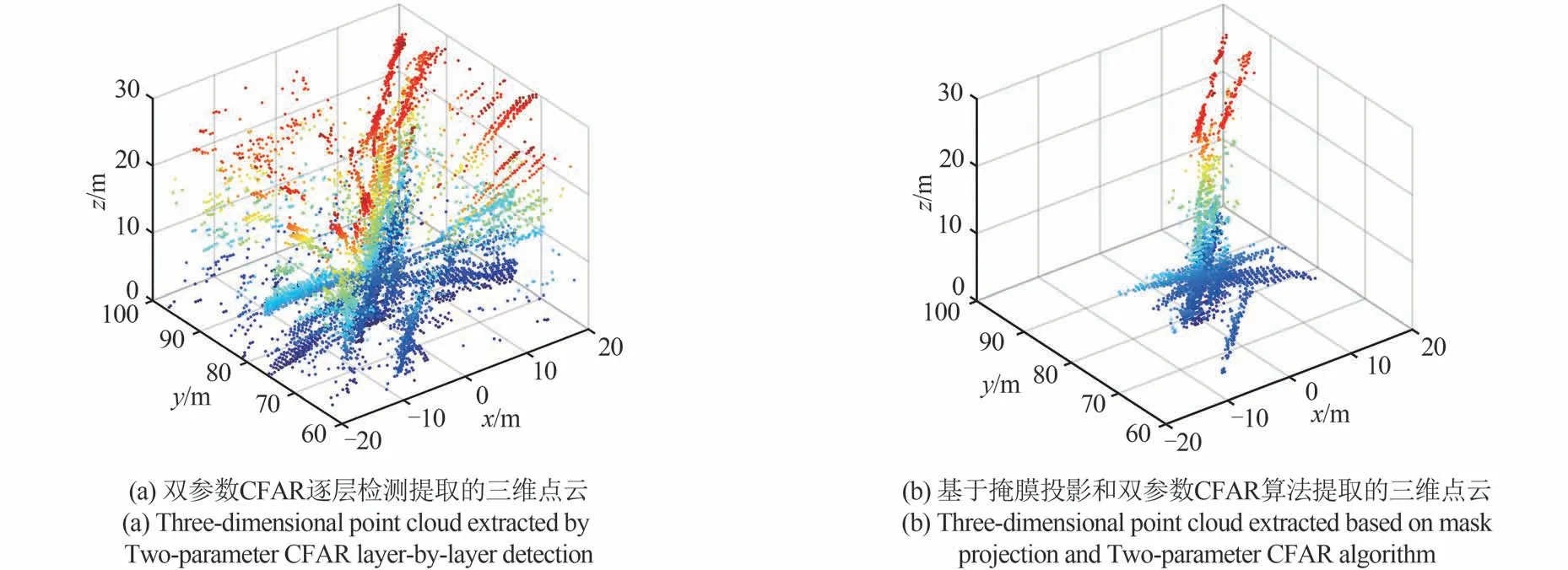
图14 三维目标点云视角图对比结果Fig.14 Comparison of 3D target point cloud view results
三维目标点云三视图投影对比如图15,上面三幅图为经典的双参数CFAR 逐层检测算法检测提取点云的三视图投影,下面三幅图为基于掩膜投影和双参数CFAR 的算法检测提取点云的三视图投影。从左到右分别为左视图,主视图和俯视图,分别用红框区分主目标区,蓝色框区分次目标。主目标区为北方工业大学博远楼门廊结构,次目标为操场围栏。经过双参数CFAR 逐层检测算法和基于掩膜投影和双参数CFAR 的算法的检测结果对比,明显看出用经典的双参数CFAR 逐层检测算法检测出结果包含大量的虚警,无法准确从现有检测结果中区分目标区域。而基于掩膜投影和双参数CFAR 的算法检测出的目标相较于经典的双参数CFAR 逐层检测算法检测出的目标轮廓更加清晰,虚警大大减少。可见基于掩膜投影和双参数CFAR 的算法在复杂背景的SAR 三维图像目标检测中可得到较好的检测结果,可实现三维成像点云的精确提取。
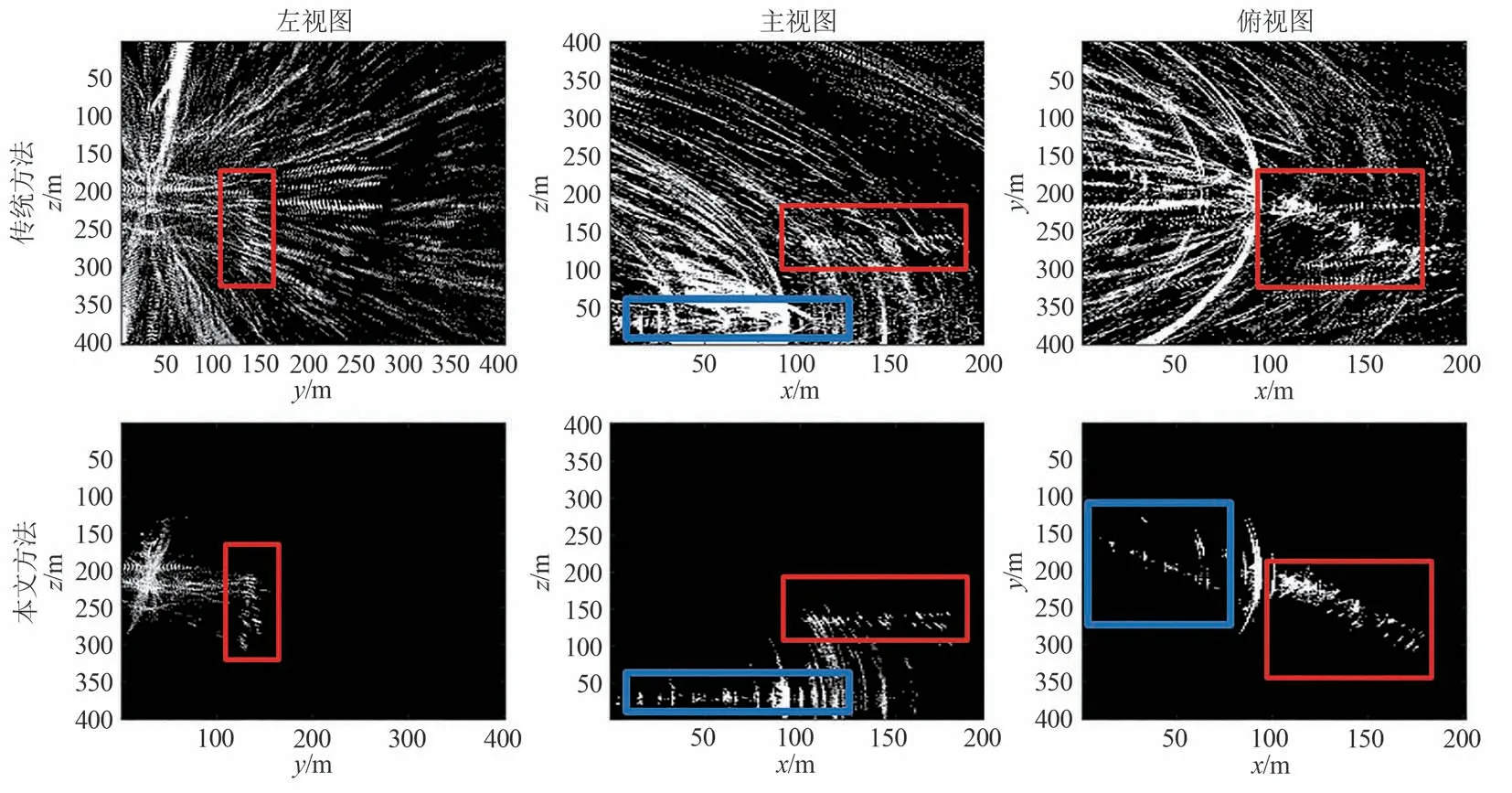
图15 三维目标点云三视图投影对比结果Fig.15 Comparison of 3D target point cloud three view projection results
5 结论
在复杂场景的SAR 三维图像中提取目标点云时,由于圆周扫描GBSAR的圆周曲线观测几何使图像存在强旁瓣问题,导致目标点丢失,虚警增加,无法直接判断出图像中的目标与背景,无法提取清晰的三维目标点云。针对这一问题本文提出了一种基于掩膜投影和双参数CFAR 的圆周扫描GBSAR三维点云提取方法,并且通过北方工业大学自研的圆周扫描GBSAR 获取的三维数据对该算法进行了处理分析,并采用目标光学图和激光雷达数据作为真值进行算法验证。最后和经典的双参数CFAR 逐层检测算法进行了方法对比分析。结果表明,该方法相比于传统方法可以更准确的提取出目标点云信息。后续工作包括进一步改进算法结构,通过引入聚类算法进一步降低旁瓣的影响。
