LC型逆变器的改进双环控制策略
2023-10-12刘秋华周维初
刘秋华, 周维初
(南京工程学院,江苏 南京 211167)
0 引 言
凭借结构简单、控制灵活和适应性强等优点,采用LC型低通滤波器滤波的电压源逆变器在不间断电源、动态电压恢复器、固态变压器及独立微电网等领域得到了广泛应用[1-4]。LC型逆变器的控制目标是实现电压指令值的精确跟踪,同时快速响应负载的变化。为此,专家学者们提出了很多控制策略,如比例积分控制、重复控制、滑模变结构控制、模型参考自适应控制、神经网络控制、模型预测控制和自抗扰控制等。
在这些控制方法中,基于传递函数模型的电压电流双环比例积分(proportional integral, PI)控制策略具有理论基础完备、可靠性高和易于设计等优点,在工业界中取得了广泛的应用。然而,随着新能源渗透率的提高和交直流微网技术的发展,电力系统的安全稳定运行将变得更依赖于逆变器的控制方式,这对逆变器的控制品质提出了更高的要求。传统双环控制器无法兼顾超调与快速性指标,动态响应和抗扰性能不足,难以实现对逆变器的高质量电压控制。因此需要对传统双环PI控制器进行改进。
1 LC型逆变器的数学模型
LC型逆变器的拓扑结构如图1所示,交流侧输出经LC滤波器滤波后向负载供电。
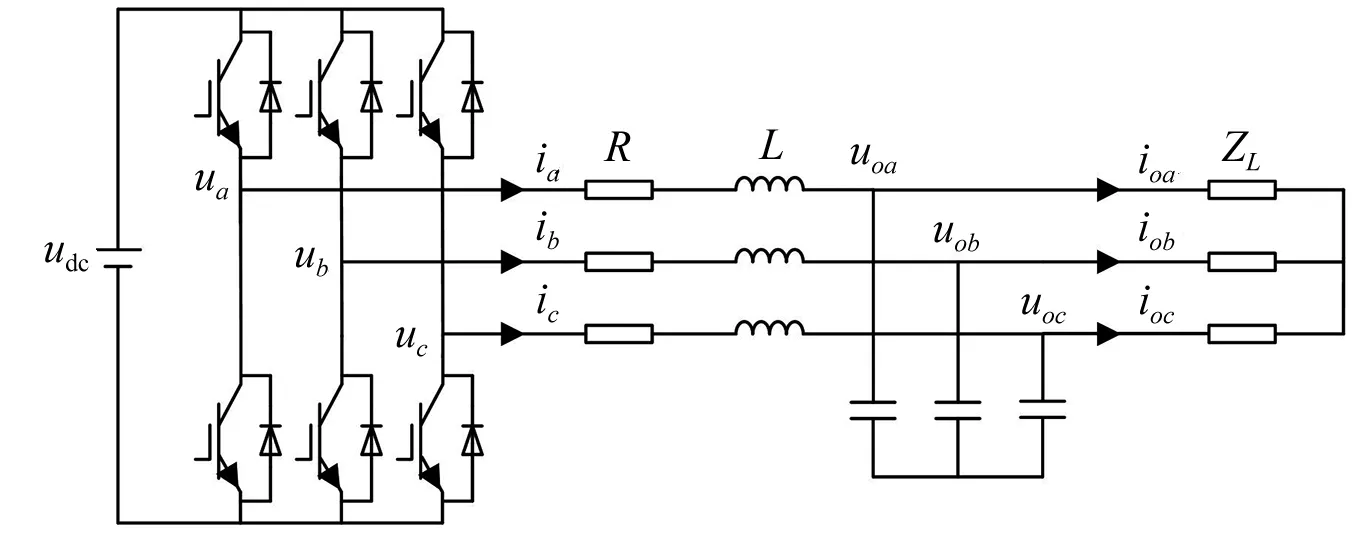
图1 LC型逆变器的拓扑结构图
图1中:udc为直流母线电压;L为滤波电感;R为滤波电感寄生电阻;C为滤波电容;ZL为三相负载;u为逆变器桥臂电压,u=[ua,ub,uc];i为电感电流,i=[ia,ib,ic];uo为电容电压,uo=[uoa,uob,uoc];io为负载电流,io=[ioa,iob,ioc]。
假设三相电路参数相同,根据图1和基尔霍夫定律可得dq坐标系的电压电流方程分别为:
(1)
(2)
式中:id、iq为dq坐标系下的电感电流;ud、uq为dq坐标系下的桥臂电压;uod、uoq为dq坐标系下的电容电压;iod、ioq为dq坐标系下的负载电流;ω为基波角频率。
2 传统电压电流双环控制分析
为使系统具有良好的快速性和抗扰性能,并且对开关管进行限流保护,采用带前馈补偿的电感电流内环电容电压外环双环控制策略,其中,双环均采用PI控制器以减小系统稳态误差和改善电压跟踪能力。逆变器双环控制系统框图如图2所示。
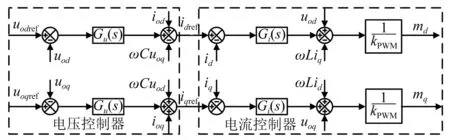
图2 逆变器双环控制系统框图
图2中:uodref、uoqref为d、q轴指令电压;idref、iqref为d、q轴指令电流;kPWM为逆变器桥路增益;Gu(s)为电压环PI控制器,Gu(s)=kup+kui/s;kup为电压环比例系数;kui为电压环积分系数;Gi(s)为电流环PI控制器,Gi(s)=kip+kii/s;kip为电流环比例系数;kii为电流环积分系数。
2.1 传统电流环控制
d、q轴控制结构相同,以d轴为例分析传统电流环,由图2得到解耦后的d轴电流环控制框图,如图3所示。
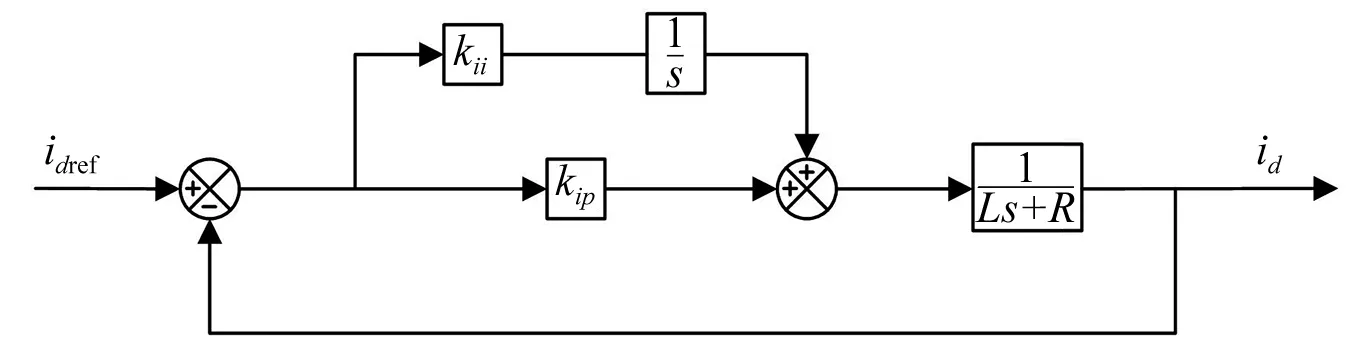
图3 d轴电流解耦控制框图
其开环传递函数为:
(3)
令零点s=-kii/kip,以消去开环传递函数的固有极点s=-R/L,从而降低系统阶数。此时,电流环闭环传递函数为:
(4)
式中:ωbi为电流环带宽,ωbi=kip/L。ωbi越大,电流响应速度越快,但ωbi要远小于逆变器的开关角频率。
2.2 传统电压环控制策略
同样以d轴为例设计分析传统电压环,由图2得到解耦后的电压环等效框图,如图4所示。
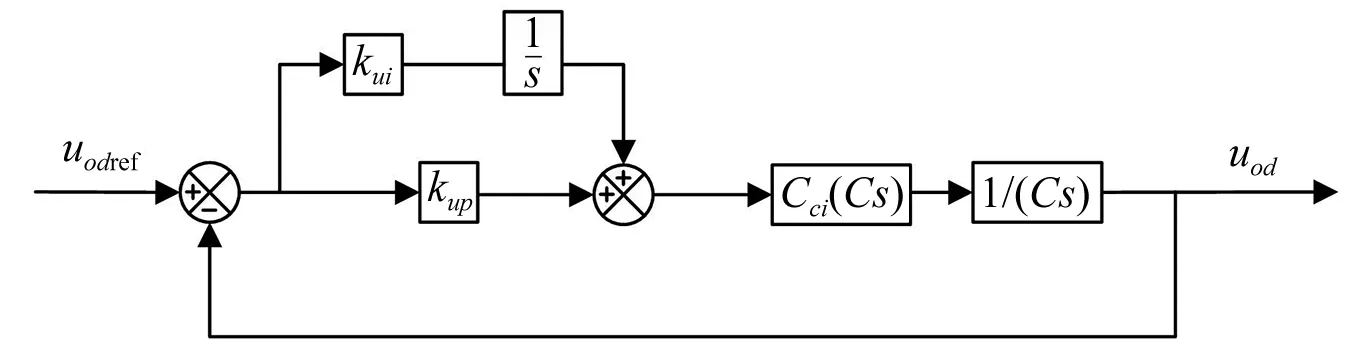
图4 d轴电压等效控制框图
忽略电流环的动态,即Gci(s)=1,则电压环闭环传递函数为:
(5)
令:
(6)
式中:ζ为阻尼比;ωn为无阻尼自然频率。则电压环传递函数可表示为:
(7)
由式(7)可求得:
(8)
式中:ωbu为电压环带宽;φm为电压环相位裕度。根据控制理论[5]的知识,为兼顾系统跟踪性能和稳定性要求,取φm=45°,代入式(8),可得此时ζ值为0.42。
3 改进双环控制策略
3.1 一阶理想系统的预测积分PI控制器
一阶理想系统如式(9)所示。
(9)
定义跟踪误差e=xref-x,其中xref为恒定参考值,x为给定值,由式(9)可得系统的跟踪误差状态方程为:
(10)
采用线性比例积分反馈控制律,即:
(11)
式中:kp、ki分别为控制器的比例系数和积分系数。结合式(10)和式(11)可得控制量为:
τ=kpe+kiq
(12)
式中:q为积分器的状态值。即
(13)
式(11)可转化为如下所示的微分方程:
(14)
根据高等数学相关知识可知,若满足:
(15)
式中:ωb为控制器的带宽。此时方程(14)的通解为:
q(t)=(c1+c2t)exp(-ωbt)
(16)
由式(16)可得误差的时域响应为:
e(t)=(c2-ωbc1-ωbc2t)exp(-ωbt)
(17)
由式(16)和式(17)可知,对于任意时刻t,若满足:
q(t)=-e(t)/ωb
(18)
则必有c2=0,于是:
e(t)=-ωbc1exp(-ωbt)
(19)
由式(19)可知,系统误差按指数函数轨迹收敛,信号跟踪无超调。
3.2 改进电流环控制策略
以d轴为例,采用3.1节所示的预测积分PI控制器对电流环进行改进,将逆变器视为比例环节,即uid=ud。式(1)中的d轴电压方程可改写为如下形式:
(20)
采用线性比例积分反馈控制律,即:
(21)
式中:eid为d轴电流跟踪误差,eid=idref-id;qid为电流环积分器状态值。电流环带宽远大于电压环,因此可假设控制周期内idref不变,由式(19)和式(20)可得控制律为:
uid=L(kipeid+kiiqid)+uod-ωLiq+Rid
(22)
电流环的控制目标是实现指令电流的快速跟踪,但是其性能受逆变器直流侧电压制约,为使电流环在指定直流电压约束条件下达到较快的调节速度,同时减小抖振,在误差较大时,采用bangbang控制[6]以提高快速性,在误差较小时采用PI控制,以克服频繁切换的缺点,以d轴为例,其控制电压为:
(23)
ic为切换阈值,ic太小会导致控制量频繁切换影响稳态性能,ic太大则会降低电流环响应速度,因此,需根据系统情况选择合适的ic值,为了切换平滑,qid采用图5所示的自适应律。
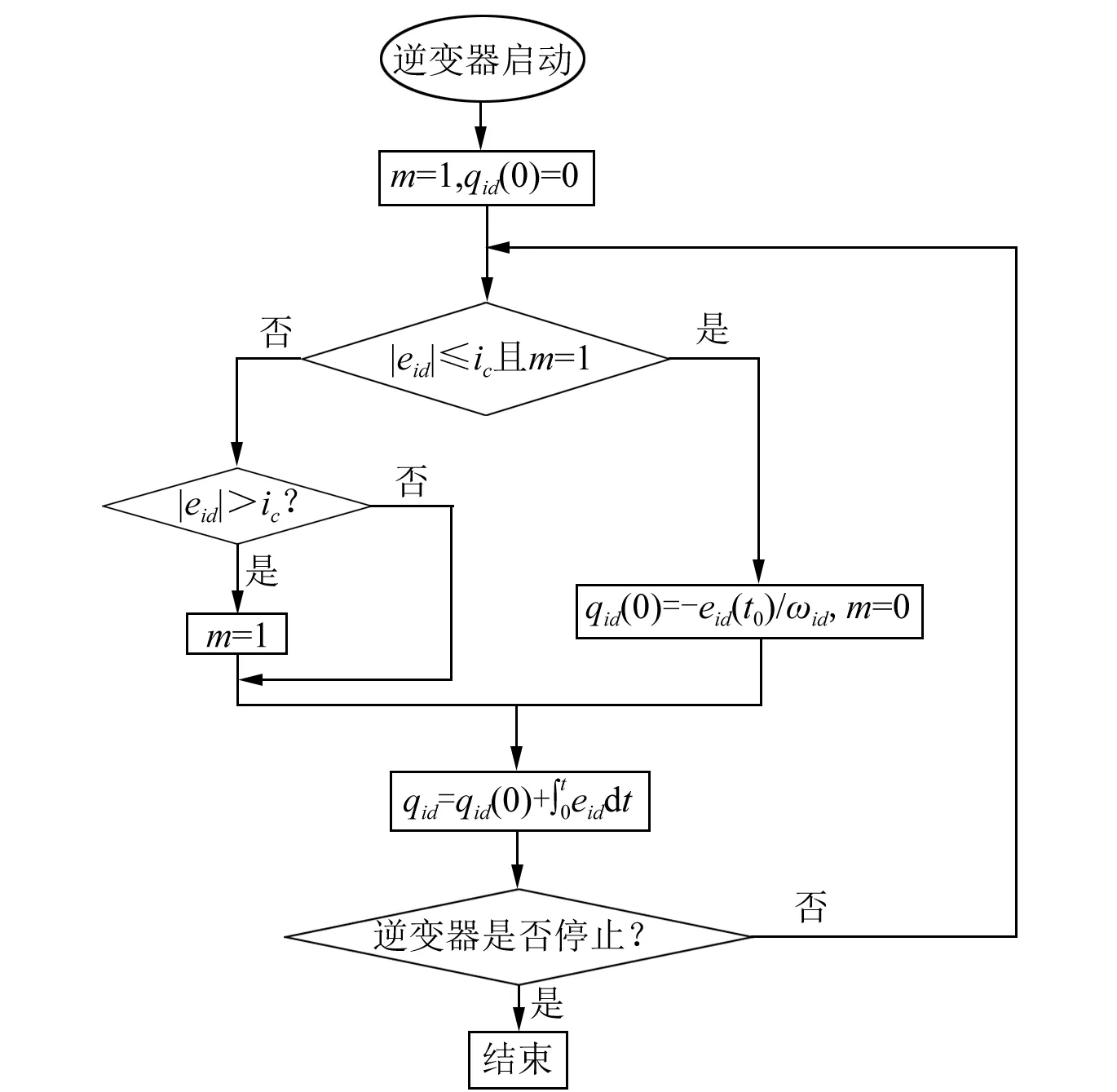
图5 qid自适应律
3.3 改进电压环控制策略
为消除阶跃响应时的超调,同样采用预测积分PI控制器对电压环进行改进(以d轴为例),忽略电流环的动态,即idref=id,式(2)中的d轴电流方程可改写为如下形式:
(24)
采用线性比例积分反馈控制律,即:
(25)
式中:eud为d轴电流跟踪误差,eud=uodref-uod;qud为电压环积分器状态值。由式(23)和式(24)可得控制律为:
idref=C(kupeud+kuiqud)+iod-ωCuod
(26)
阶跃负载扰动时,受逆变器直流侧电压限制,电流环动态无法忽略,系统处于饱和非线性状态,因此在电压恢复过程中会产生退饱和超调。根据3.1节的分析结果,当检测到扰动时,通过一阶低通滤波环节使积分器实际状态值跟踪电压环积分器预测状态值quds,即可消除这一超调,电压环积分器积分状态值的自适应律如图6所示。
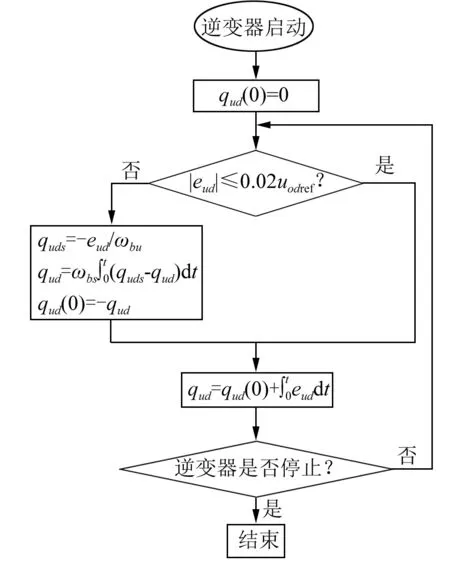
图6 qud自适应律
图6中:ωbs为滤波器带宽。
4 仿真验证
为验证本文所提改进双环控制策略的有效性,在MATLAB/Simulink平台中搭建LC型逆变器的仿真模型。对采用传统双环以及改进双环控制策略时的系统性能进行对比分析。初始时,逆变器满载启动,系统稳定运行后,0.08 s时切除负载,待系统恢复稳定后,0.16 s时重新投入负载。图7和图8给出了采用传统双环控制和改进双环控制时的仿真波形。对比可知,改进双环控制策略消除了阶跃响应时的电压超调,抑制了负载扰动时突变,同时提高了系统的动态响应速度。图9和图10为两种控制策略下逆变器带非线性负载时的a相电压波形。观察图9和图10可知,采用本文所提改进双环控制策略时,逆变器具有较高的稳态精度和较低的谐波畸变率值。
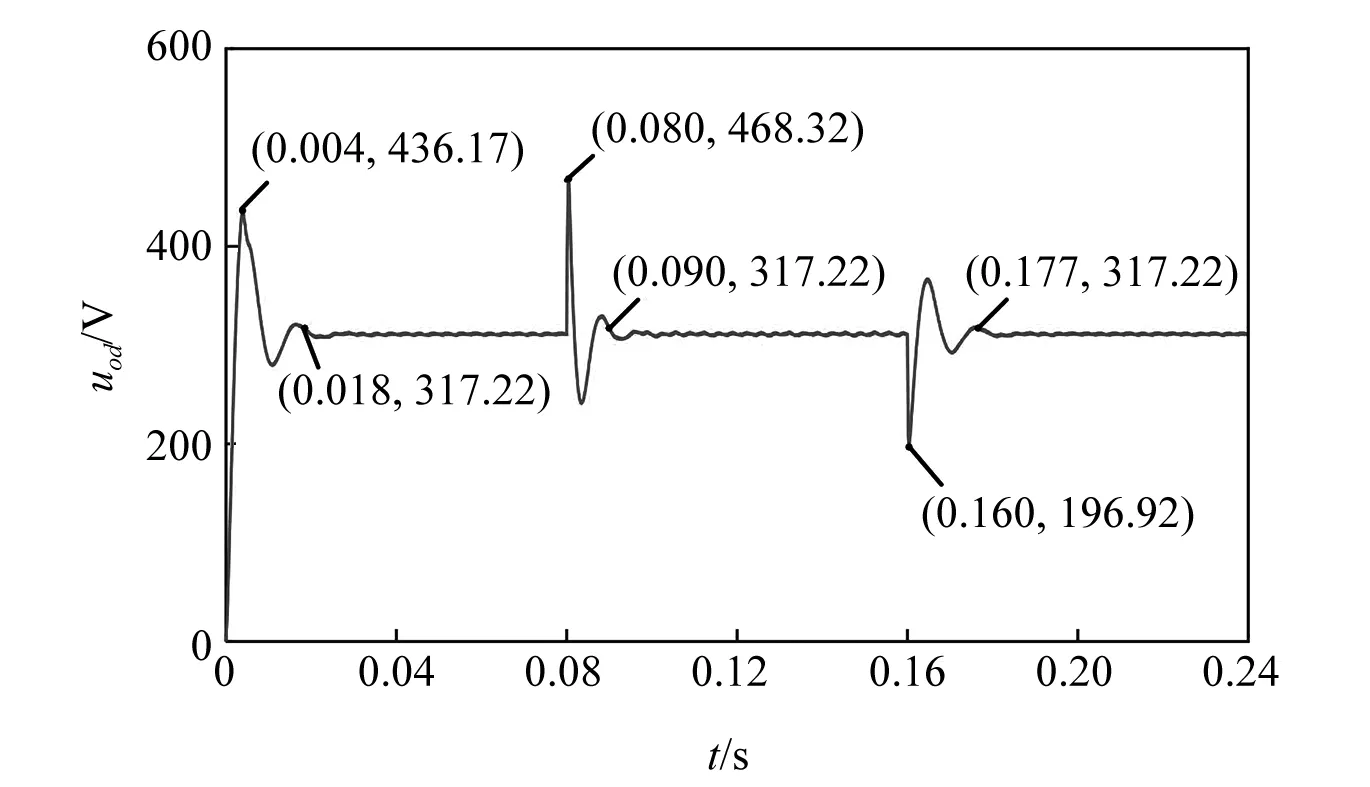
图7 传统双环控制策略下的d轴电压暂态波形
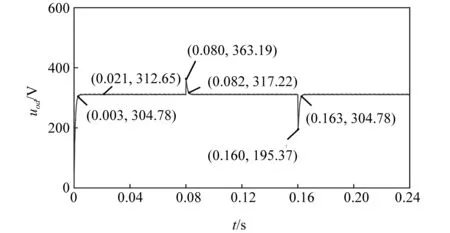
图8 改进双环控制策略下的d轴电压暂态波形
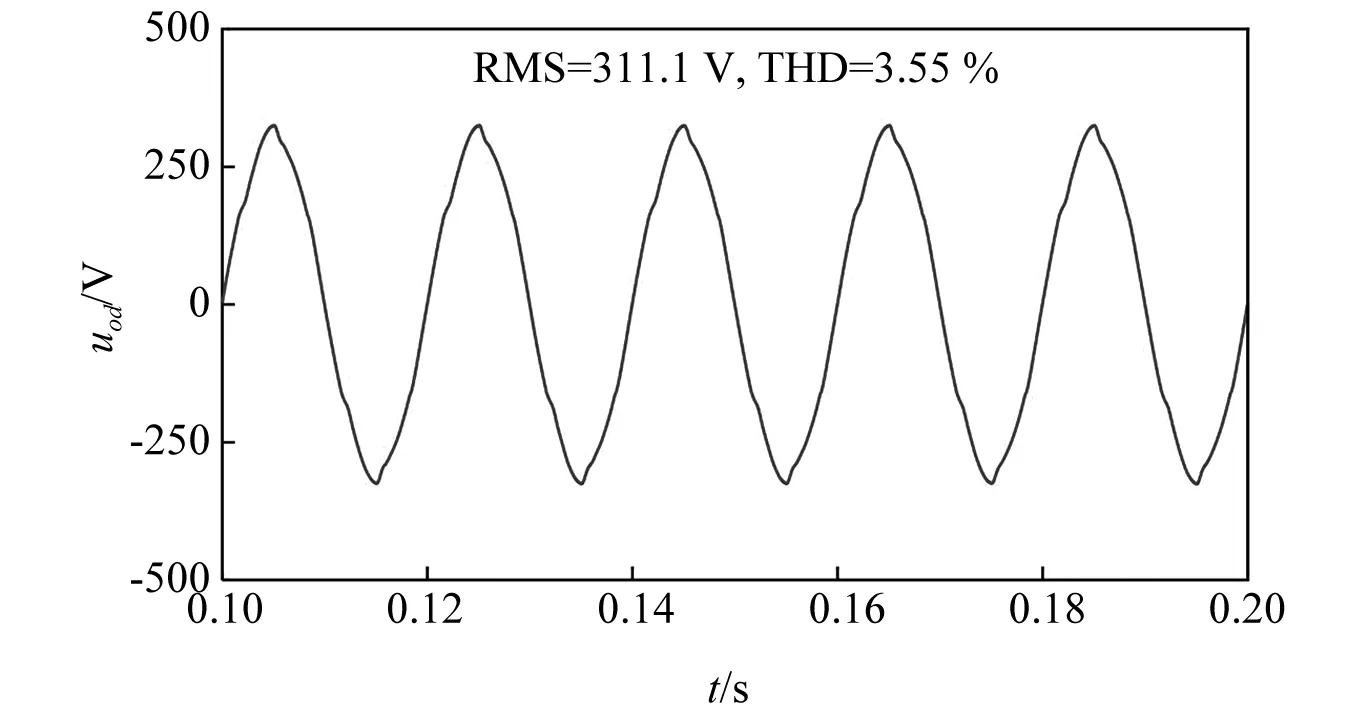
图9 带非线性负载时传统双环控制策略下的a相电压波形
图10 带非线性负载时改进双环控制策略下的a相电压波形
5 结束语
针对LC型逆变器,本文提出了一种设计简单,适合工程应用的改进电压电流双环PI控制策略,MATLAB/Simulink平台仿真试验表明该方法具有以下优点。
(1) 采用线性比例积分反馈控制律后,电压外环和电流内环均可等效为纯积分环节,基于带宽可以很容易地整定控制器参数。
(2) 阶跃响应和负载扰动时电压均不存在超调,因此系统暂态时的电压波形畸变较小,同时逆变器能够快速响应负载的变化。
(3) 稳态运行时,逆变器的跟踪误差小,THD值低,输出电压波形质量较高。