基于神经网络的船舶稳性预报研究
2023-10-12蒋柴丞,李楷,马坤
蒋 柴 丞, 李 楷, 马 坤
(大连理工大学 船舶工程学院,辽宁 大连 116024 )
0 引 言
目前,国际海事组织针对第二代完整稳性中5种失效模式的计算方法已基本确定.第一层薄弱性衡准评估虽然计算简便,但计算精度不足;第三层直接稳性评估虽然计算精度高,但需要实验且计算过程非常烦琐;第二层薄弱性衡准选择的数学模型概率方法,在保持精度的同时,计算过程的复杂程度有所降低,但因需要计算横摇阻尼以及船舶阻力等参数,耗时仍然较长.
神经网络广泛应用于船舶快速性、耐波性、操纵性预报,以及船舶识别、船舶定位等领域[1-3].Yang等采用径向基函数(RBF)神经网络对集装箱船进行阻力预报,并与反向传播(BP)神经网络、支持向量机、随机森林等的预测结果进行对比[4].李占英系统比较了BP神经网络、RBF神经网络、对角递归网络(DRNN)、回声状态网络(ESN)等算法对船舶横摇运动的预报,并提出了组合预报方法,在预报精度上有较大提高[5].神经网络同时也大量应用于船舶柴油机故障诊断中[6-7].而船舶稳性方面,国内外大量学者主要针对第二代完整稳性的应用进行研究[8].
目前,采用神经网络对船舶稳性进行预报的相关研究尚有大量空白.因此本文选择RBF神经网络对船舶过度加速度失效模式、瘫船稳性失效模式以及骑浪/横甩失效模式的失效概率进行预报,并通过研究船舶相关参数对各失效模式的影响来确定网络输入特征,从而减少计算复杂度,在保证精度的情况下对船舶稳性进行预报,以便省略船舶稳性计算中横摇阻尼以及船舶阻力等参数的复杂计算过程.
1 预报方法
1.1 RBF神经网络结构
RBF神经网络可用来解决多维拟合问题,能够逼近任意非线性函数,可以处理系统内难以解析的规律性问题,具有良好的泛化能力和较快的学习收敛速度,已成功应用于非线性函数逼近、时间序列分析、数据分类、信息处理、系统建模等领域.
RBF神经网络是一种前向三层神经网络.在前向传递过程中,信号由输入层进入网络,经过隐藏层径向基函数处理,而后通过对各隐藏层结果进行线性组合得到网络输出.RBF神经网络结构如图1所示.
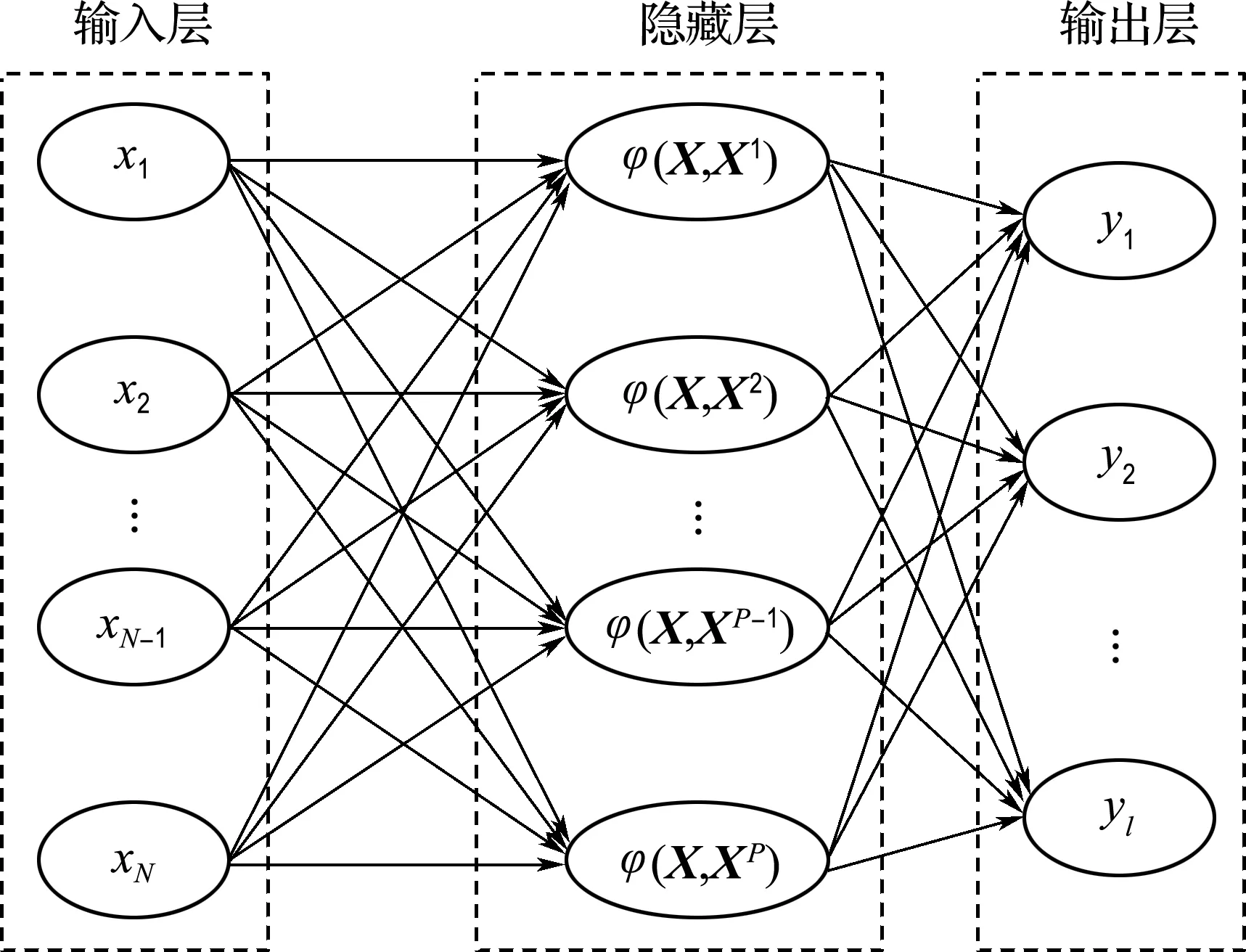
图1 RBF神经网络结构
图1中,x1,x2,…,xN是RBF神经网络的输入值,y1,y2,…,yl是RBF神经网络的预测值,N和l分别为输入层和输出层节点个数,X1,X2,…,XP是隐藏层节点的数据中心,P为隐藏层节点个数.
1.2 网络输出计算
RBF神经网络的隐藏层节点输出值通过径向基函数获得.对于一组特征向量X=(x1x2…
xN),隐藏层节点输出值的计算公式如下:
(1)
式中:hp为第p个隐藏层节点的输出值,φ为径向基函数,Xp为第p个隐藏层节点的数据中心.本研究采用高斯函数作为径向基函数,其计算公式如下:
(2)
式中:r为特征向量到数据中心的距离,δ为扩展常数.因此RBF神经网络输出值计算公式如下:
(3)
其中ωp为第p个隐藏层节点对输出层节点的权重.
1.3 输入特征选取
神经网络输入层节点个数的选取一般由研究者自己确定.作者所在课题组长期研究船舶相关参数对第二代完整稳性中各个失效模式的影响[9],参数包括船长、船宽、型深、吃水、方形系数、中横剖面系数、水线面系数、重心高度等.
根据作者所在课题组得到的相关研究结果,选择其中对各失效模式有明显影响的船舶相关参数作为各预报网络的输入特征,并以此确定输入层节点个数.使用该方法可避免将过多的不相关参数作为网络的输入特征,导致确定隐藏层节点数据中心的复杂度上升,在耗时更长的同时却没能减小预报误差以及提高预报精度.
1.4 网络参数修正
修正RBF神经网络参数的目的,是为了使网络输出结果不断接近真实值,从而减小预测值与期望值之间的误差.目前,常用的RBF神经网络参数修正方法有两种:通过无监督学习算法得到隐藏层节点的数据中心和方差,通过监督学习算法获得隐藏层到输出层的权重;采用监督学习算法对网络所有参数(隐藏层节点的数据中心、方差和隐藏层到输出层的权重)进行训练,对代价函数(均方误差MSE)进行梯度下降,然后修正每个参数.
本研究采用BP算法,根据每个样本预测值与期望值之间的误差ei进行逐次修正,误差ei的计算公式如下:
ei=F(X)′-F(X)
(4)
其中F(X)′为网络的期望输出.
此时定义训练目标函数为M组输入-输出对的均方误差,计算公式如下:
(5)
根据预测误差修正网络权重和参数,同时为加快算法收敛速度,避免算法陷入局部最小值,引入学习速率,计算公式如下:
(6)
式中:η为学习速率,c为数据中心.
1.5 预测误差评估
为了反映训练后网络预测的准确性,采用均方误差(ems)和平均绝对百分比误差(MAPE,emap)对预测结果进行误差分析,计算公式如下:
(7)
式中:d为预测样本数量,一般认定平均绝对百分比误差小于10%时预测效果良好[10].
1.6 算法实现流程
根据上述计算理论以及计算公式,采用C++编程语言开发RBF神经网络,算法流程如图2所示.

图2 RBF神经网络算法流程图
2 网络输入特征以及训练样本
2.1 各失效模式输入特征确定
作者所在课题组不断研究船舶相关参数对第二代完整稳性中各失效模式的影响,其中船舶主尺度参数包括船长、船宽、型深以及吃水,船体形状参数包括方形系数、水线面系数以及中横剖面系数,载重参数包括重心高度.
在研究过程中发现,船长和型深变化对过度加速度失效模式长期失效概率的计算结果几乎不产生影响.因此,本研究选择船宽、吃水、重心高度、方形系数、水线面系数以及中横剖面系数作为预报该失效模式失效概率的网络输入数据,即输入层节点个数为6.输出层节点个数为1,代表过度加速度长期失效概率预报结果.
针对瘫船稳性失效模式,除了上述船舶相关参数,所在课题组还同时加入了进水角对倾覆概率的影响研究.在研究过程中发现,船长变化对计算结果几乎无影响.因此,本研究选择船宽、型深、吃水、重心高度、方形系数、水线面系数、中横剖面系数以及进水角作为预报该失效模式失效概率的网络输入数据,即网络输入节点个数为8.输出层节点个数为1,代表瘫船稳性倾覆概率预报结果.
针对骑浪/横甩失效模式,除了上述船舶相关参数,同时还加入了船舶航速对失效概率的影响研究.在研究过程中发现,型深变化对计算结果几乎无影响.因此,本研究选择船长、船宽、吃水、重心高度、方形系数、水线面系数以及船舶航速作为预报该失效模式失效概率的网络输入数据,即网络输入节点个数为7.输出层节点个数为1,代表骑浪/横甩失效概率预报结果.
最终,各网络节点个数见表1.

表1 各网络节点个数
2.2 训练样本获取
为避免输入特征的尺度不平衡而导致网络训练时误差下降速度过慢,甚至出现误差下降梯度为零的情况,本研究对各失效模式的部分输入特征进行量纲一化处理.各失效模式预报中选择的相关输入特征见表2.
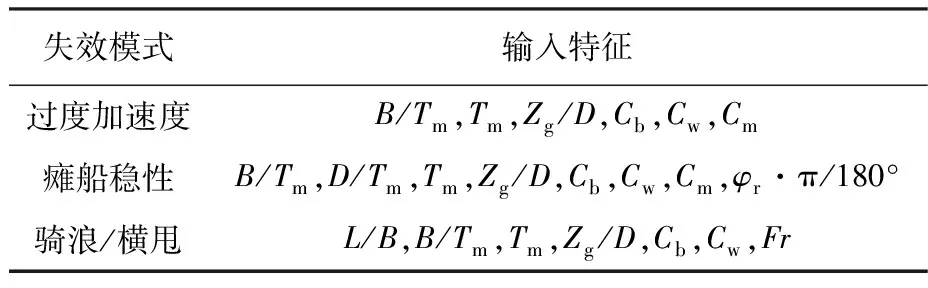
表2 各失效模式输入特征
表2中相关符号意义如下:L为船长;B为船宽;D为型深;Tm为吃水;Zg为重心高度;Cb为方形系数;Cw为水线面系数;Cm为中横剖面系数;φr为进水角;Fr为弗劳德数.
为验证RBF神经网络的预报效果,本研究选取3种不同种类共4艘样本船的各失效模式失效概率作为算例.失效概率计算结果通过所在课题组开发的计算程序获得,该程序根据国际海事组织颁布的第二代完整稳性衡准草案中描述的计算原理开发.各样本船的相关参数见表3.

表3 样本船相关参数
为得到网络的训练样本,本研究采用CAESES对4艘样本船进行全参数化建模,按0.90、0.95、1.00、1.05、1.10比例改变包括船长、船宽、型深、方形系数、水线面系数、中横剖面系数等建模参数,得到系列船型.因为采用了全参数化方法对船体进行建模,所以可以保证在改变某一参数时,其他参数保持不变.将系列船型的型值点以及相应船型数据代入计算程序中得到计算结果.以同样比例改变航速、重心高度等稳性计算程序输入数据,得到4艘样本船在不同航速以及载况下的稳性计算结果.将以上结果进行整合得到对不同失效模式进行预报时所需的样本集.
本研究将获得的样本数据以约6∶1的比例划分为训练集和预报集.
3 预报结果分析
3.1 过度加速度长期失效概率预报结果
本研究通过改变所选样本船的船舶相关参数,得到74组船舶样本.而后采用课题组开发的过度加速度计算程序,获得相应的长期失效概率.将其中64组样本数据作为训练集,对RBF神经网络进行训练.采用训练后的神经网络对剩下的10组船舶样本进行长期失效概率预报,预报结果、期望值以及绝对百分比误差见表4.
由表4可知,使用训练好的RBF神经网络对船舶过度加速度长期失效概率进行预报时,样本的最大绝对百分比误差约为18%,最小绝对百分比误差约为0.9%.除个别样本预报结果与期望值的绝对百分比误差大于10%,其余均小于10%.各预报结果基本接近对应的期望值,预报效果良好.
3.2 瘫船稳性倾覆概率预报结果
本研究通过改变所选样本船的船舶相关参数,得到116组船舶样本.而后采用课题组开发的瘫船稳性计算程序,获得相应的倾覆概率.将其中100组样本数据作为训练集,对RBF神经网络进行训练.采用训练后的神经网络对剩下的16组船舶样本进行倾覆概率预报.预报结果、期望值以及绝对百分比误差见表5.
由表5可知,使用训练好的RBF神经网络对船舶瘫船稳性倾覆概率进行预报时,样本的最大绝对百分比误差约为16%,最小绝对百分比误差约为0.4%.除个别样本预报结果与期望值的绝对百分比误差大于10%,其余均控制在10%以下.各预报结果基本接近对应的期望值,预报效果良好.
3.3 骑浪/横甩失效概率预报结果
本研究通过改变所选样本船的船舶相关参数,得到58组船舶样本.而后采用课题组开发的骑浪/横甩计算程序,获得相应的失效概率.将其中50组样本数据作为训练集,对RBF神经网络进行训练.采用训练后的神经网络对剩下的8组船舶样本进行失效概率预报.预报结果、期望值以及绝对百分比误差见表6.
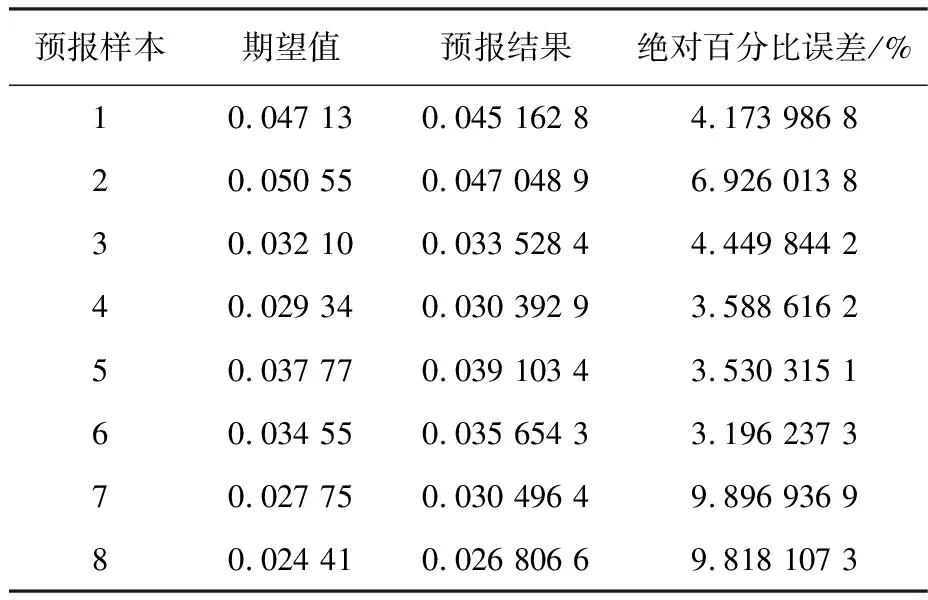
表6 骑浪/横甩失效概率预报结果、期望值及绝对百分比误差
由表6可知,使用训练好的RBF神经网络对船舶骑浪/横甩失效概率进行预报时,样本的最大绝对百分比误差约为9.9%,最小绝对百分比误差约为3%.所有样本预报结果与期望值的绝对百分比误差均在10%以下.各预报结果基本接近对应的期望值,预报效果良好.
3.4 误差分析
根据式(7)计算得到RBF神经网络对各失效模式失效概率预报结果的均方误差和平均绝对百分比误差见表7.
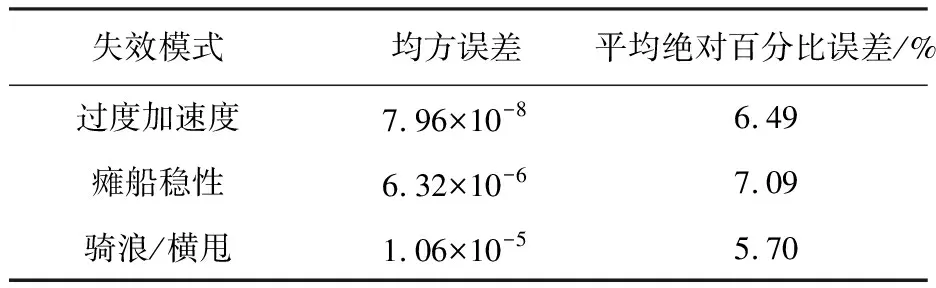
表7 各失效模式预报结果误差
各失效模式失效概率预报结果对应的平均绝对百分比误差均小于10%,预报效果良好,证明训练好的RBF神经网络可用于预报船舶稳性性能.
4 结 语
本文针对船舶稳性的神经网络预报方法进行研究.选择第二代完整稳性中的过度加速度、瘫船稳性及骑浪/横甩失效概率作为稳性评估标准.
本研究采用以高斯函数作为径向基函数的RBF神经网络作为预报方法.通过研究船舶相关参数对3种失效模式失效概率的影响,选择预报网络的输入特征,并对其进行量纲一化处理.这种方法可避免将过多的不相关参数作为网络的输入特征导致确定隐藏层节点数据中心的复杂度上升,从而降低训练时长.训练后的RBF神经网络对样本船各失效模式失效概率的预报结果与期望值之间的平均绝对百分比误差均小于10%,预报结果良好,证明RBF神经网络可用于船舶稳性预报.采用该方法对船舶稳性进行预报,可省去计算横摇阻尼及船舶阻力的复杂过程.
由于第二代完整稳性共有5种失效模式,后续可将纯稳性丧失以及参数横摇加入研究中.同时,本研究对隐藏层节点的确定采用专家经验法,后续可结合数值优化算法提高预报精度.未来将继续进行多种不同网络模型对船舶稳性预报的研究,并在研究中不断扩充样本数量,研究样本数量对预报精度的影响,提高预报精度.
