面向倾转旋翼机的TRC 响应类型控制律设计
2023-09-27徐绍峰常绍平金鑫石鹏飞樊峪
徐绍峰,常绍平,金鑫,石鹏飞,樊峪
航空工业西安飞行自动控制研究所,陕西 西安 710065
倾转旋翼机是一种兼具固定翼和直升机优势的新型高速飞行器,其既具有固定翼飞行器的高速巡航性能,又兼备垂直起降和空中悬停的能力,能够满足多种飞行任务需求,具有广阔的发展前景[1]。倾转旋翼有人机分为直升机模式、过渡模式及固定翼模式三种飞行模式,飞行员的操纵十分复杂,尤其是在低速或悬停时,操纵负荷十分繁重,在执行舰面着舰、搜救跟进、海面悬停反潜、低空突防等任务科目时,需精确控制俯仰角和纵横向平移速度,进一步增大了操纵负荷,给飞行安全带来了隐患。
常用的响应类型包括角速率响应类型(RC)和姿态响应类型(AC)。同直升机一样[2],倾转旋翼机采用上述响应类型在低速或悬停状态下,需要频繁动杆操纵才能准确地判断倾转旋翼机的速度变化趋势,在不良目视条件下尤其增加了飞行员的操纵负荷。因此,需要稳定程度更高的响应类型来提高其任务执行能力。
美国颁布的军用直升机飞行品质规范ADS-33E[3-5],包含评定直升机操纵性、稳定性和机动性的客观评定指标,且针对特定飞行任务科目提供了驾驶品质主观评定方法,涵盖了当代先进直升机的使用要求和技术特点,已成为各国直升机研制的设计依据。通过研究发现,ADS-33E对不同任务的各个模态都规定了不同的响应类型,平移速率响应类型(TRC)即直升机的平移速率和直升机的杆位移(杆力)成比例,在位置保持任务方面能够很好地降低飞行员工作负荷,应用于低能见度UCE=3 (可用感示环境等级为3,即不良目视环境)和夜视镜/头盔显示器(NVG/HMD)的评估,是响应类型中稳定程度最高的一种。对于倾转旋翼有人机,采用TRC保证飞机的周期变距杆操纵直接对应直升机的平移速度,相较于RC、AC,不需要频繁动杆操纵,可以准确地判断飞机的速度变化趋势,在不良目视条件下更好地减小飞行员操纵负荷,增加安全性。
国外CH-47F 直升机第一个实现了TRC 响应类型,在这之后,AH-64D、UH-60M、CH-53K 等先进直升机也采用TRC 响应类型来提升不良目视环境下的驾驶品质[6-8]。但从现有的资料来看,国内外的倾转旋翼机还未采用TRC响应类型,研究适用于倾转旋翼机的响应类型对提高飞机的任务执行能力、降低复杂操纵下的安全隐患具有重要意义。
本文根据有人直升机飞行品质要求,设计了倾转旋翼机直升机模式下的TRC 响应类型,对于减轻飞行员操纵负担,提升倾转旋翼有人机任务执行能力具有重要意义。
1 倾转旋翼机飞行动力学模型
1.1 倾转旋翼机飞行动力学建模
倾转旋翼机具有旋翼和机翼两种升力来源,在三种模式中各种力矩产生变化且影响较大,存在滑流区影响下的机翼建模、双旋翼气动力精确建模和飞/发及其他建模等难点。
在本文的设计中,采用基于机理法的建模方法,首先定义力和力矩分析采用的坐标轴系,接着分别建立机翼、旋翼、机身、尾翼、发动机等部件模型,通过坐标传递矩阵转换至机体坐标系下,最终建立倾转旋翼一体化模型,大致框架如图1所示。
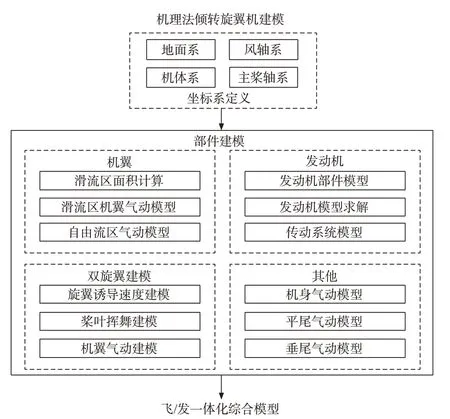
图1 机理法倾转旋翼机建模框图Fig.1 Modeling block diagram of tiltrotor aircraft based on mechanism method
由于机翼、机身、尾翼、垂尾等部分气动模型及六自由度运动方程建模与常规建模方法类似,因此不再赘述;其中旋翼作为倾转旋翼机的重要部件,在直升机飞行模式和倾转飞行模式下,既是升力面,又是操纵面,还是推进器,因此建立准确合理的旋翼空气动力模型是倾转旋翼机飞行动力学数学建模的关键所在。
旋翼气动特性十分复杂,其中,气动力、桨叶挥舞运动、旋翼诱导速度三者相互作用、相互影响,之间的关系如图2所示[9]。旋翼诱导速度、桨叶挥舞运动,以及旋翼气动力三者均在旋翼风轴系下进行计算,然后再将旋翼气动力和力矩转换到桨毂轴系下,最后转化到机体轴系下。
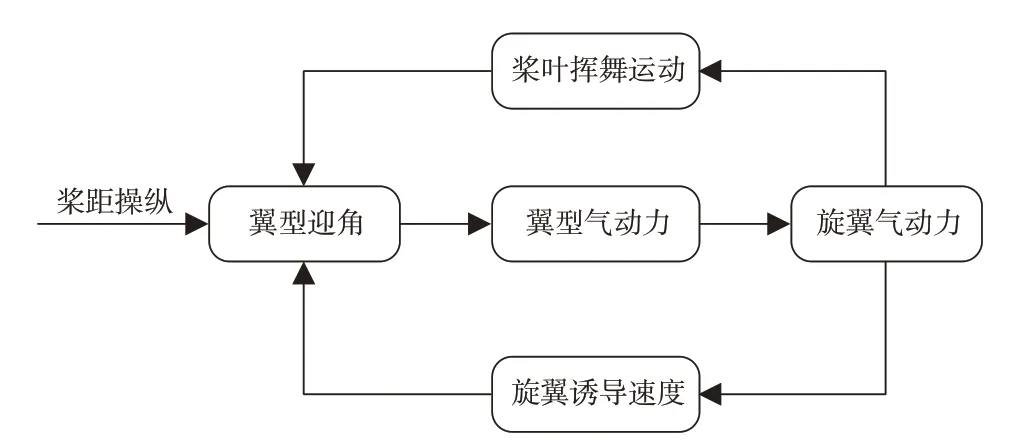
图2 旋翼复杂气动特性Fig.2 Complex aerodynamic characteristics of rotors
1.1.1 旋翼诱导速度建模
本文在建立倾转旋翼机诱导速度模型时采用三自由度一阶谐波线性入流的Pitt-Peters 动态入流模型[10]。Pitt-Peters动态入流模型以加速度势理论[11]为基础,把诱导速度表达为方位角和旋翼展向位置的函数,从而描述扰动所引起的诱导速度在桨盘上的非均匀分布。本文所建立旋翼诱导速度矢量的表达式为
式中,ψ为桨叶的方位角;r是量纲一形式的桨叶半径;λ0,λ1s,λ1c分别为旋翼时均入流和一阶横、纵向入流分量。
1.1.2 桨叶挥舞运动建模
旋翼气动载荷对桨叶挥舞运动有着很大影响。在进行桨叶挥舞运动建模时,只考虑桨叶一阶刚性挥舞,用一阶谐波常系数形式来表示挥舞角。本文所建立挥舞角的表达式为
式中,d为桨叶挥舞角;ψ是桨叶的方位角;a0,a1,b1为一阶谐波系数。
1.1.3 旋翼气动建模
倾转旋翼机的旋翼分为左右两副,两者大小、转速相同,但转向相反。左旋翼旋转方向设定为顶视顺时针方向,右旋翼旋转方向设定为顶视逆时钟方向,且两者的桨毂中心位置不同。因此分左右旋翼分别建模,在风轴系下计算得到旋翼气动力与力矩后转换到桨毂轴系下,最后转化到机体轴系。
1.1.4 倾转旋翼操纵策略
倾转旋翼机有直升机和固定翼两种飞行模式,在本文建立的模型中,通过总距杆、纵横向周期变距杆和脚蹬实现对旋翼、副翼、升降舵和方向舵的操纵。固定翼模式与旋翼模式下分别采用一套操纵方式,过渡过程中则采用混合操纵策略。本文设计的倾转旋翼机具体操纵策略见表1。

表1 倾转旋翼机操纵策略Table 1 Control strategy of tilt-rotor
1.1.5 倾转旋翼非线性飞行动力学数学模型
从各部件气动模型计算得到力和力矩后代入机体运动方程,再加上操纵模型后最终得到倾转旋翼机非线性飞行动力学数学模型,用一阶微分方程的形式可表示为
式中,y为倾转旋翼机飞行动力学方程的全部状态量,u为倾转旋翼机的操纵量。y由机体运动量yB、旋翼挥舞运动量yF和旋翼入流量yI组成;u由旋翼桨根总距角θ0、纵向操纵杆位移量δlong、横向操纵杆位移量δlat和脚蹬的位移量δped组成。它们分别定义为
配平结果是验证飞行动力学模型准确与否的重要依据,本文使用MATLAB自带的Trim函数在不同的速度点下进行了配平计算,并将配平得到的姿态角和操纵量与GTRS模型结果[12]进行了对比,结果显示配平结果的差距较小,变化趋势基本一致,符合标准,从而验证了本文通过机理法建立的倾转旋翼机模型的准确性。其中,GTRS 是以XV-15为对象建立的通用倾转旋翼机模型,已有XV-15的飞行验证。
1.2 模型线性化
为完成TRC响应类型控制律的设计和验证,首先采用“小扰动”的方法对倾转旋翼机悬停状态点的非线性方程进行线性化,得到倾转旋翼机定常运动的小扰动线性状态空间方程为
式中,A为气动导数矩阵,为9×9 矩阵;B为操纵导数矩阵,为9×10矩阵;C为单位矩阵。
A、B具体为
x可表示为
式中,u,v,w分别为倾转旋翼机机体坐标系下的前向速度、侧向速度、垂向速度;p,q,r分别为滚转角速度、俯仰角速度、偏航角速度;ϕ,θ,ψ分别表示滚转角、俯仰角和偏航角。
式中,θ0r,θ0l分别为左右旋翼总距;B1cr,B1cl分别为左右旋翼纵向周期变距;B1cl,A1cl分别为左右旋翼横向周期变距;δelev为升降舵偏转量;δail为副翼偏转量;δped为脚蹬偏转量;in为短舱倾角。
2 倾转旋翼机TRC控制律设计
2.1 飞行品质规范要求
飞行品质规范ADS-33E将TRC响应类型规定为:对于恒定的俯仰和滚转操纵位移,应在相应的方向上产生成正比的相对于地面的稳定平移速度;并规定了上升时间和操纵梯度的要求。上升时间定义为在飞行员阶跃操纵输入后直升机平移线速度达到稳态响应速度63.2% 的时间,如图3所示。若上升时间短,则会增加杆力,导致驾驶杆灵敏度减小,使飞行员获得同样平移速度需要付出更大的操纵量,增加飞行员的工作负荷。飞行员在CH-47F上多次进行地面模拟及飞行试验,认为等效上升时间在2.5s和5s之间时,综合考虑驾驶杆的杆力、杆灵敏度以及直升机的响应是较为合适、可接受的[13]。平移速度随杆操纵量梯度变化的品质等级要求则如图4所示。图3中,ẋss和ẏss分别为纵向、横向平移速率;Tẋeq和Tẏeq分别为纵向、横向等效上升时间。

图3 等效上升时间的定义Fig.3 Definition of equivalent rise time

图4 TRC操纵响应品质等级划分Fig.4 TRC maneuvering response quality level classification
2.2 TRC控制律设计
本文基于显模型跟踪控制结构开展TRC 响应控制律的设计,具体为在指令模型中首先设计姿态响应/姿态保持(ACAH)指令模型控制结构,之后在其基础上增加速度反馈回路形成TRC 响应类型的控制律设计。控制律设计的具体流程如图5所示。
显模型跟踪控制结构包含指令模型(显模型)、逆模型、反馈补偿及控制对象4部分,基本原理为:控制指令作用于指令模型,生成期望的目标指令,逆模型消除对象特性,指令模型与系统相应的状态变量相比得到误差,继而通过控制作用产生控制信号,如图6所示。
图中,R(s)为控制输入,D(s)为指令模型,P-1̂(s)为逆模型,P(s)为控制输出,H(s)为反馈补偿,U(s)为输出响应。

图5 控制律设计流程Fig.5 Control law design flow

图6 显模型跟踪控制系统结构Fig.6 TRC maneuvering response quality level classification
近似求解逆模型P-1̂(s) ≈P-1(s),则系统由输入R(s)到输出U(s)的传递函数为
即闭环系统的输出量等于指令模型的输出(显模型输出),与被控对象无关;故根据显模型控制结构,通过设计期望的指令模型便可实现系统对指令信号的跟踪。
对于俯仰和滚转轴,设计ACAH指令模型,即姿态跟随驾驶杆阶跃输入指令,根据相关标准规范,指令模型为一个标准的二阶环节。根据实际情况,航向轴无须采用ACAH响应类型,采用RC响应类型,即直升机航向角速度跟随脚蹬输入指令,指令模型为一个标准的一阶环节[14]。两种响应类型的结构为
式中,θref为俯仰角期望值;δlong为杆位移;ωn为指令模型的自然频率;ζ为指令模型的阻尼比;K为杆力梯度,即单位杆位移对应的期望俯仰角姿态响应,一般为非线性关系;τ为时间常数。
指令模型自然频率的选择关系到模型跟踪性能,自然频率过小存在飞行员诱发振荡的风险,过大又会使直升机响应速度难以追上模型输出状态;对于参数的选取,本文按照ADS-33E 飞行品质规范对直升机的性能要求结合工程经验并通过仿真进行选取,具体设计参数见表2。
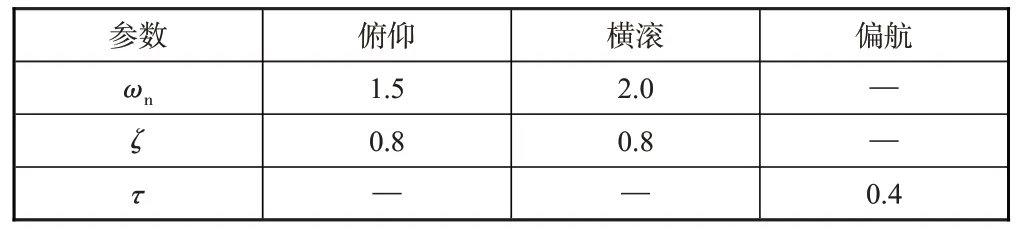
表2 设计参数Table 2 Design parameters
在ACAH 指令模型控制结构基础上增加速度反馈回路,最终形成TRC指令模型控制律的设计。纵向TRC响应控制结构具体实现如图7 所示,横向TRC 响应控制原理与之相似。

图7 纵向TRC控制系统结构Fig.7 TRC maneuvering response quality level classification
图7 中,Δδlong为纵向杆位移增量,Vx为纵向地速,KV为纵向地速增益,θ为俯仰角,Kθp为俯仰角比例增益,Kθi为俯仰角积分增益,q为俯仰角速率,Kq为俯仰角速率增益,KB1C为纵向周期变距增益。
控制内回路通过角速率和姿态角反馈进行传统的增稳控制,通过角速度反馈增加倾转旋翼机在直升机模式下的阻尼比,通过姿态角的反馈增加其静稳定性。
首先纵向杆位移增量经过指令整形得到平移速度指令,计算与经过处理的直升机纵向地速反馈信号的差得到速度误差量;速度误差量进入内回路通过PI控制器,通过放大误差倍数并增加系统的型别使输出跟踪指令信号,最后经过纵向周期变距增益得到纵向周期变距控制量,再经过旋翼指令解算为旋翼控制信号输出到倾转旋翼机作动器,从而实现倾转旋翼机TRC响应类型的控制。
3 仿真及品质评价
20s时,分别以纵横向周期变距杆的阶跃信号为输入进行MATLAB仿真,得出纵横向周期变距杆位移与对应速度之间的关系如图8和图9所示;两个方向的杆位移量与对应的平移速率、上升时间根据相关品质规范从仿真结果图中读取,见表3。

图8 纵向TRC响应曲线Fig.8 Longitudinal TRC response curve

图9 横向TRC响应曲线Fig.9 Transverse TRC response curve

表3 仿真结果Table 3 Simulation results
从仿真结果可以看出,横纵向平移速度和杆的阶跃操纵量输入成正比,且具有一阶外形,经过计算等效上升时间为3.54s、3.25s,满足ADS-33E 飞行品质规范中规定的2.5~5s的范围区间。
将杆位移量对应的纵横向平移速率结果绘制到规范中规定的响应类型品质评估等级图中,如图10所示。由图10可以看出,横纵向的平移速率响应结果,都符合品质规范中规定的要求,且为等级1。

图10 TRC响应类型品质评估结果Fig.10 TRC response type quality assessment results
4 结论
本文基于飞行品质规范的要求,针对倾转旋翼有人机直升机模式下的响应类型问题进行了深入研究,完成了倾转旋翼有人机的建模、线性化及TRC响应类型控制律的设计与仿真。仿真结果表明,本文设计的TRC响应能提升倾转旋翼机在悬停低速状态下的操纵精度和稳定性,减轻飞行员操纵负荷,提升任务执行能力,满足倾转旋翼机对近地低速飞行稳定性的更高需求。
