倾转旋翼机舵面故障后动态倾转过渡优化
2023-09-27陈金鹤陈立霞黄水林
陈金鹤,陈立霞,黄水林
中国直升机设计研究所 直升机动力学全国重点实验室,天津 300300
倾转旋翼机具有三种飞行模式:直升机模式下低速性能良好,固定翼模式下飞行速度可超过550km/h,过渡模式可实现平滑地在直升机模式和飞机模式间的转换;且其具有飞行噪声低、飞行包线宽的优势。但倾转旋翼机由于构造复杂,也存在一定的技术问题,尤其是在倾转过渡变体、变速过程中的稳定性和操纵性变化显著,同时在飞行过程中可能遇到各种可预见与不可预见故障,则会导致飞行员应急操纵不当,很可能造成飞行事故,因此研究倾转旋翼机舵面故障后的应急操纵和飞行轨迹,对制定应急操纵程序和提升飞行安全具有重要意义。
操纵面故障(失效、卡滞、松浮)是引起飞行事故的主要原因之一。故障的出现将改变倾转旋翼机的飞行动力学特性,缩小飞行包线。针对倾转旋翼机舵面失效后的飞行轨迹和操纵,国内外集中于容错控制的理论研究[1-5],当飞行器在飞行过程中发生故障或者意外损伤时,重构飞行控制,通过实时调整控制器参数或改变控制器结构,维持正常的飞行。倾转旋翼机的操纵冗余是其可重构的基础,故障的多样性[6-7]导致容错控制存在局限性,且飞行控制律的重构同样面临最终的飞行轨迹和操纵受指令的影响,难以兼容飞机状态、飞行环境等一系列限制条件下的择优性。
为确保故障后的飞行安全,重新规划安全飞行轨迹和提供相应的操纵参考,采用数值优化方式则是一种降低飞行试验成本和风险的重要手段。基于数值优化方法的常规直升机故障研究[8-9],将发动机失效和尾桨卡滞/失效后的安全着陆问题转换为轨迹优化问题,采用数值优化算法进行求解。倾转旋翼机故障后的研究同样集中于发动机失效后的低速回避区、最优化轨迹和操纵[10-14],其中Carlson[10-12]面向倾转旋翼机发动机失效后的飞行轨迹和操纵优化问题进行了研究,主要采用纵向操纵、旋翼拉力、短舱倾角等变量,建立纵向二维刚体动力学模型,并结合安全着陆适航要求,对倾转旋翼机低速回避区进行了研究。严旭飞[13]引入XV-15混合操纵模型,建立倾转旋翼机增广纵向二维飞行动力学模型,着重研究了短距起飞单发失效着陆的最优化轨迹。
面向倾转旋翼机舵面失效、卡滞、松浮等故障状态后的飞行轨迹和操纵优化的研究相对较少。本文考虑倾转过渡过程中的重心、惯量变化,以倾转旋翼机纵向飞行动力学模型为基础,通过对倾转过渡过程进行解析,构建倾转旋翼机动态倾转过渡和故障状态的最优控制模型;采用混合多重打靶法进行离散化处理形成非线性规划问题,并基于序列二次规划算法进行求解。最后,以XV-15倾转旋翼机为研究对象,开展倾转过渡过程的仿真验证,并进行故障注入后的飞行轨迹和操纵优化研究。
1 倾转旋翼机基础模型
针对XV-15倾转旋翼机的正向倾转过渡过程中,出现执行机构的松浮和卡滞等故障状态后的最优安全飞行策略进行研究。根据倾转旋翼机的纵向对称特性,以及不考虑横向运动,可认为倾转过渡过程中倾转旋翼机的飞行及操纵都应当在纵向平面内[14]。倾转旋翼机飞行动力学模型中旋翼气动力的计算采用叶素理论、均匀入流模型、准定常一阶挥舞运动;考虑旋翼尾迹对机翼的干扰,将机翼划分为滑流区和自由流区,自由流区的机翼气动模型和常规飞机机翼类似,滑流区的机翼气动力模型需要考虑旋翼尾流在机翼处的干扰速度和滑流区的面积;不考虑旋翼尾迹、机体对尾翼的气动干扰。各部件的气动力和力矩系数均来自XV-15的吹风数据[15,16]。
式中,θ0为左、右旋翼桨根总距,θs为纵向周期变距,θe为升降舵偏转角,δcol为总距杆量,δlon为纵向杆,δIN为短舱倾转角,∂θ0/∂δcol为总距系数,θ0G为总距管理器补偿量,旋翼总距补偿角θ0L与δN相关,θsmax为最大纵向周期变距,δB1为补偿量,θemax为升降舵最大偏转量[14]。
采用操纵量的一阶导数作为控制变量,避免数值优化计算过程中出现“bang-bang”现象。倾转旋翼机飞行动力学方程如下
式中,y=[u,w,q,θ,x,h,δcol,δlon,δIN]为状态变量,其中,u为纵向速度,w为垂向速度,q为机体俯仰角速率,θ为机体俯仰角,x为纵向位移,h为飞行高度,为总距杆操纵速率,lon为 纵 向 杆 操 纵 速 率,̇N为 短 舱 倾 转 角 速 率。u=[δ̇col,̇lon,̇IN]为控制变量;t为时间;倾转旋翼机的重心随着发动机短舱的倾转在飞行器纵向平面内移动,发动机短舱的重心位置不在旋翼轴上,采用以下方程进行计算
式中,βM=π/2-iN,iN为短舱倾角;SLCG|iN=90,WLCG|iN=90为倾转旋翼机直升机模式的重心纵向、垂向位置;WP和GW分别为两个发动机短舱的总质量和飞行器总质量;SLsp,WLsp,SLp,WLp分别为发动机短舱中心和短舱支点的纵向、垂向位置。
倾转飞行过程中,倾转旋翼飞行器的纵向转动惯量同样会随着发动机短舱的倾转而变化,可用式(4)进行计算
式中,IYY|iN=90为直升机模式下倾转旋翼飞行器的惯性矩;KI2为常系数[16]。
2 动态倾转过渡及故障模型
倾转旋翼机在升降舵、旋翼执行机构出现故障后,仍然存在一定的可操纵性,如倾转旋翼纵向平面内的操纵存在冗余,即升降舵和纵向周期变距间存在一定的替代性,这类操纵冗余是倾转旋翼机在发生执行机构故障后,可以安全飞行的基础。
倾转旋翼机的最优动态倾转过渡问题可转化为一种时间连续的非线性动态最优控制问题。在遭遇升降舵、旋翼执行机构等故障后,从一类满足可操纵性和安全性的操纵策略中找到一种可以使直升机由初始状态倾转过渡到指定目标状态的操纵策略,并使性能指标达到最优。最优控制问题一般由性能指标、动态方程、边界条件和路径约束组成。
(1) 性能指标
倾转旋翼机在动态倾转过渡过程中,由于短舱倾转,旋翼垂向力和机翼升力变化,导致俯仰姿态有较大变化,则需要飞行员采用适当的操纵来稳定姿态控制,还需考虑整个动态倾转过渡的时间,故性能指标如下
式中,J为目标变量;t0为初始时刻;tf为末端优化时刻;wt为末端时间加权系数;wc为操纵量加权系数矩阵;wq为俯仰角速率加权系数;wθ为俯仰角加权系数。
(2) 状态方程
采用上述倾转旋翼机飞行动力学方程(2)。
(3) 边界条件
倾转旋翼机直升机模式稳定飞行状态为初始边界条件;飞行末端边界条件设定为倾转角度以及前飞速度,即
式中,int为目标短舱倾转角度;ẋt为目标前飞速度。
(4) 路径约束
由于倾转旋翼机受操纵系统限制,需要对操纵速率、操纵杆量等进行限制;操纵杆量的范围不变。
倾转过渡过程中机体姿态不宜过大,对机体俯仰姿态角θ和角速率q进行限制。
式中,hmin,hmax为飞行高度的上下限。
旋翼可用功率的限制是最基本和最重要的限制要素,则过渡过程中的功率约束为
式中,Pmax为倾转旋翼发动机输出的额定功率。
2.1 故障模型
飞行器控制系统的故障可分为传感器故障、作动器故障、系统状态故障和模型偏差故障,这里主要讨论作动器常见故障,包括操纵面卡死和操纵面损伤。
(1) 操纵面卡死故障
此故障可描述为
式中,a为常数,且umin≤a≤umax,uout为故障操纵面;umin和umax为操纵面的限制范围,操纵面卡死故障表现为操纵面位置始终固定于操纵面输出限制范围内的某一固定位置。
(2) 操纵面损伤故障
此故障可描述为
式中,β为操纵面损伤系数,且0 ≤β≤1,操纵面损伤故障表现为故障操纵面的操纵效率下降为原来的β倍。
2.2 数值解法
进行数值优化计算过程中,由于状态变量和控制变量的量纲、数值之间差别较大,会导致数值求解困难。因此对最优控制模型进行量纲一缩放化处理,其中状态方程(2)可写成如下形式
其中
混合单一多重打靶法是一种联合直接多重打靶和单一打靶法用于处理高阶非线动力学模型的较为实用的方法,如图1 所示。复杂度较高的直升机飞行动力学模型是较难用于非线性轨迹优化研究的,这是由于难以做到兼顾计算效率和计算精度两个方面,尤其是需要处理复杂的非线性非定常的旋翼模型。在最优化离散过程中,需要划分极小的积分步长用于处理高频变化的状态量以满足计算精度要求。旋翼状态量xR的变化相对机体状态量变化要迅速得多;且在状态量发生细小的改变时,旋翼上的力和力矩的剧烈变化,针对旋翼状态量,难以给出较为合理精细的限制约束。
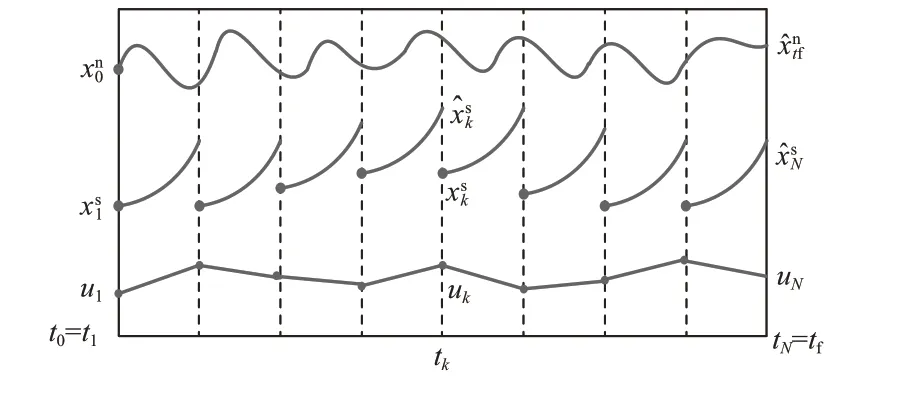
图1 混合打靶法Fig.1 Hybrid shooting method
应用单一打靶法来处理桨叶挥舞运动和旋翼入流状态量,关注旋翼初始状态和末端的状态量,用于限制旋翼的运动,在飞行过程中的变化过程不参与优化计算;应用多重打靶法处理旋翼状态量的难点在于计算量过大且较难匹配约束条件,但可用于处理机体状态量xF和飞行员操纵杆量xu。可将上述主控方程的状态量重新分块表示为
式中,xs为低频变化量;xn高频变化量。
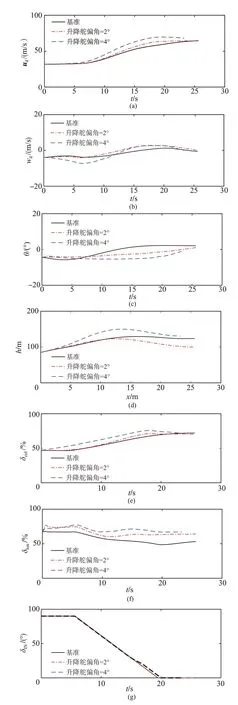
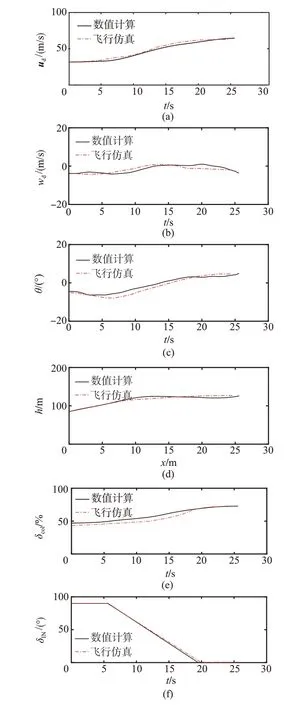
将最优控制模型中的时间t平均分成N-1段,形成N个离散时间节点t0=t1 因此在任一打靶区间Ωk的残差方程为 采用同样的方式计算性能指标函数(5)、边界约束和路径约束等,即可构建非线性规划模型 将非线性最控制问题转化为非线性规划模型后,应用稀疏系列二次规划算法求解即可得到最优解X∗,序列二次规划算法计算效率高、收敛快,适用于计算大规模非线性最优化问题。 利用本文建立的倾转过渡最优控制模型计算正向动态倾转过渡过程,并与参考文献[16]中的人在回路的仿真数据进行对比,以验证本文建立的倾转旋翼机动态倾转过渡过程最优控制模型的可靠性。参考文献[17]中人在回路的倾转旋翼机动态倾转过渡过程,飞行员采用爬升过程中进行短舱倾转,以确保飞行安全性,其倾转过渡的初始条件为:速度为32m/s,高度为88m,航迹角为7°。此时为直升机模式稳定飞行状态。飞行员自行决策倾转过渡的初始条件和时间,动态倾转过渡过程完全由飞行员进行决策调整。完成正向倾转后的速度保持在65m/s。进行最优化计算时采用与人在回路仿真的一致条件。另外,仿真试验中的短舱倾角由飞行员根据当前飞行状态进行触发,存在随机性,上述基本约束条件难以准确描述短舱倾转时间点,因此添加以下约束条件 式中,t1,t2为分段优化时间节点。 图2给出了本文建立的倾转旋翼机动态倾转过渡最优轨迹与参考文献中的倾转动态过程的对比,其中飞行状态基本一致,由于仿真模型存在一定差异,纵向杆量匹配性相对较差,这是由于本文动力学模型与参考文献[17]中的人在回路仿真的模型存在差异,主要在于本文旋翼对机翼干扰模型相对简单,无法精细化反映出旋翼尾迹在机翼上的偏移影响,并未考虑不同旋翼倾角和前飞行速度下对旋翼/机身/机翼/平尾的上洗和下洗的影响,同时本文并未将控制增稳系统(SCAS)纳入模型,以上导致了纵向杆量有一定差异。但本文的杆量基本反映出了倾转过渡过程中纵向操纵规律。本文基于最优控制理论建立的倾转旋翼机动态倾转过渡基本能够满足动态倾转过渡研究与分析。 图2 倾转旋翼机动态倾转过渡对比验证Fig.2 Dynamic transition verification of tilt-rotor aircraft 倾转旋翼机在故障发生后具备可操纵性是飞行轨迹优化的基础。在上述前向动态倾转过程中注入升降舵损伤、卡滞故障,进行倾转动态倾转过渡可行性分析,图3给出了升降舵损伤结果。 图3 升降舵损伤故障后的倾转过渡过程Fig.3 History of transition after elevator damage fault 图3 中,针对倾转旋翼机升降舵注入舵面损伤故障,在注入升降舵损伤故障后,倾转旋翼机基本能够完成相应的倾转过渡过程,倾转过渡过程基本无较大影响。其中建立的动态倾转过渡最优模型,其目标函数中包含最少完成时间,以及方程(18)中限制了倾转过渡触发最小时刻,因此倾转角度变化过程基本无变化;升降舵的舵效损失会影响升降舵的实际偏转量,倾转旋翼机纵向通道的总操纵功效为 式中,ΔMδlon为纵向通道总操纵功效;ΔMθs为旋翼纵向周期变距形成的操纵功效;ΔMθele为升降舵形成的操纵功效。 其中直升机模式阶段(短舱倾角为90°),以旋翼的纵向周期变距和升降舵共同操纵,因此在该阶段升降舵舵效出现损失时,则飞行员采取增加杆量以应对该升降舵操纵的损失的飞行策略;直升机模式拉升总距杆量和增加纵向杆量输出,以使倾转旋翼机在直升机模式下获取更大的爬升率,并保持倾转旋翼机在倾转过渡末端的飞行高度。 随着短舱倾转,按照上述混合操纵模型,旋翼纵向周期变距的操纵功效逐渐减小,纵向操纵逐渐过渡至升降舵,因此纵向杆量的需求在倾转初始阶段基本一致,随着短舱倾角接近0°,升降舵为唯一操纵面,但同时面临升降舵舵效不同损失程度,导致飞行员采取增加纵向杆量的策略,其中损失系数越小,则需要的纵向杆量越多,这是由于倾转旋翼机达到65m/s稳定前飞速度所需升降舵的实际舵偏总是一致的。 图4给出了升降舵卡滞后的倾转旋翼机动态倾转过渡过程,在注入升降舵卡滞故障后,基本采用更大的推杆操纵,以旋翼纵向周期变距操纵为主,当旋翼倾转至固定翼模式后,旋翼纵向周期变距失效,同时随着升降舵卡滞角度逐渐增加,平尾形成的低头力矩逐渐增加,此时飞行员通过提升总矩油门杆量,提高前飞速度,抑制倾转旋翼机的低头过程。随着升降舵偏角卡滞量的增大,总距油门量增加,导致前飞速度迅速增加,加速了倾转过渡过程。 本文针对倾转旋翼机动态倾转过渡过程中的舵面故障问题,基于最优控制理论建立分析模型,并进行数值仿真,得出舵面故障后的最优飞行轨迹和操纵,结论如下: (1) 建立的舵面故障分析模型,可快速分析计算倾转旋翼机舵面故障后的最优化飞行轨迹和操纵,可用于飞行员应急操纵参考。 图4 升降舵卡滞后的倾转过渡Fig.4 History of transition with elevator getting stuck (2) 升降舵出现舵效损失时,固定翼模式低速模式下存在可操纵能力,此时飞行员需要增大纵向杆量输出;升降舵出现卡滞后,此时倾转旋翼机虽然存在一定的动态倾转过渡能力,但由于固定模式下,倾转旋翼机的纵向操纵能力丧失,无法实现固定翼模式下的较大速度飞行。 (3) 升降舵出现舵效损失或卡滞时,倾转旋翼机虽然存在一定的操纵空间,当采取直升机模式飞行,以旋翼纵向周期变距操纵为主。3 动态倾转舵面故障数值仿真
3.1 动态倾转过渡验证
3.2 升降舵损伤故障状态分析
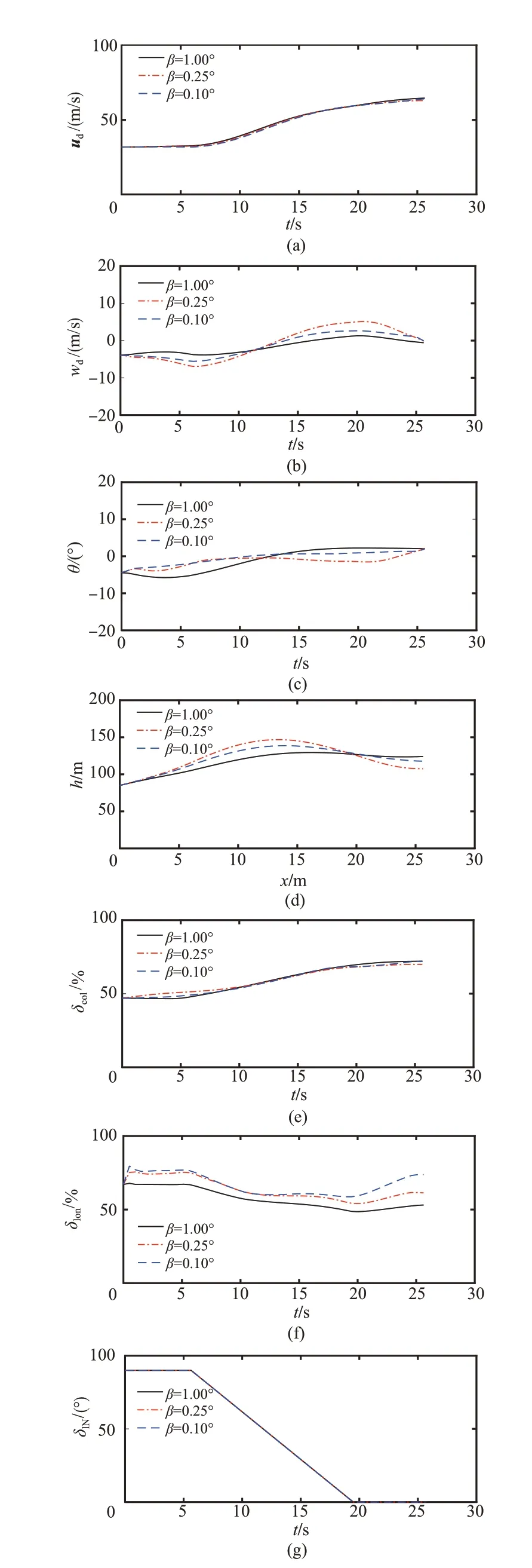
3.3 升降舵卡滞故障状态分析
4 结论