基于任务效能的倾转旋翼机能力需求指标优化方法
2023-09-27王高峰张广林何振亚
王高峰,张广林,何振亚
1.中国航空工业发展研究中心,北京 100029
2.中国航空研究院,北京 100029
随着交通强国、航空强国的提出与市场的不断发展,时间成本在航空任务中的比重不断提高,民用直升机即将面对一轮新的升级换代需求[1]。倾转旋翼机具有航程远、速度快、垂直起降的性能特点,以倾转旋翼机为代表的高速旋翼飞行器能够有效支撑我国交通运输体系、应急救援体系建设,填补相关领域能力空白。但新型民用高速旋翼飞行器缺乏参考样机和统计数据,在前期设计阶段难以准确地根据市场需要提取各项能力指标需求,对各项指标进行权衡优化,难以有效对后续论证、研制过程提供指导参考。本文采用优化设计方法对倾转旋翼机的能力需求指标进行优化研究,具有重要的工程应用价值。
进入21 世纪以来,国外就逐步将最优化、多目标优化技术引入直升机设计中,针对直升机、旋翼机的总体设计、分系统设计等开展了优化研究[2-3]。近年来,国内各航空航天高校及院所通过传统迭代法、神经网络、蚁群算法、遗传算法等方法针对固定翼、旋翼飞行器的总体参数[4-7]、部分系统[8-11]开展了优化研究。但上述研究没有与需求指标和效能评估形成有机结合,没有解决“如何从市场中得到倾转旋翼机的能力需求指标,基于其生成优化后的能力需求指标序列以指导论证、研制过程”这个问题。
本文以国内外相关研究为基础,基于K-Means聚类分析方法、粒子群算法(PSO)、倾转旋翼机性能估算模型,构建了一种基于任务需求分析及效能仿真的倾转旋翼机能力需求指标优化方法,能够以任务(集)为输入,整理分析并得到一系列任务簇,在每个任务簇中开展基于任务效能仿真的能力需求指标优化计算,最终输出优化后的效能最优且可行的倾转旋翼机性能指标、技术指标序列,为论证、研制等过程提供支撑和参考。
1 优化方法总流程结构
本文旨在构建一套从任务剖面(集)开始,基于任务效能的性能指标优化方法。图1 为优化方法的总体流程架构,主要包括任务剖面分析、效能仿真、倾转旋翼机模型、粒子群优化4个主要模块。
本文的主要输入为需求端收集的典型任务剖面/任务想定数据集,主要输出为针对各任务簇的倾转旋翼机最优设计点位的技术参数、性能参数序列,优化方法流程如图1所示。
分析—优化的流程如下:(1)对任务剖面进行分析,根据给定和调研得到的任务剖面/任务想定集,以及关注的主要任务领域,调整效能计算方法,构建任务仿真模型;(2)对任务剖面集进行聚类分析,计算最优聚类数,将其分为可由型号A、B、C等覆盖的任务簇,并计算得到各任务簇的性能需求范围;(3)综合性能需求范围、技术发展约束、倾转旋翼机模型,构建由可行设计点位构成的可行设计空间;(4)在可行设计空间中通过粒子群优化算法寻找任务效能最优的设计点位,并输出其技术参数和性能参数。
本文构建的优化方法流程适用于直升机、倾转旋翼机等航空装备,通过调整性能计算模型、效能仿真模型即可实现迁移应用。
2 K-Means聚类分析方法
K-Means聚类分析方法于1956年由Steinhaus提出,具有无监督、解释性好的优点,对大量模糊数据的聚类分析具有良好的适用性。聚类分析算法的核心思想是对于给定数据集D及聚类数k,通过迭代分类计算的方法构建给定数量的聚类簇,且使各簇内对象距所属聚类中心的欧氏距离之和最小,即
式中,xi为数据集中的对象成员,μk为各簇的聚类中心点。
传统的K-Means 聚类算法初始聚类中心是随机生成的,在聚类空间中的分布并不均匀,可能导致聚类效果不稳定。可以参照相关改进算法,通过对初始聚类中心的预处理对算法进行优化,消除初始聚类中心的随机性,使其在聚类空间中形成相对均匀的分布[12]。改进算法步骤如图2所示。其中,聚类输入包括数据集D,以及聚类簇数k;聚类输出为k个聚类簇的聚类结果。

图1 优化方法流程Fig.1 Flowchart of optimization method

图2 K-Means聚类算法流程Fig.2 Flowchart of K-Means clustering algorithm
具体步骤为:(1)对数据集D中的任意两个样本的欧氏距离进行计算:dist(xi,xj)= ||xi-xj||2;(2)选择所有聚类样本组合中总欧氏距离最小的一点xi作为初始聚类中心μ1;(3)对数据集D中任意对象成员xi进行遍历,计算其与目前最近的聚类中心μk的欧氏距离dist(xi,μk);(4)对dist(xi,μk)进行排序并计算平均距离Jave,遍历得首个使dist(xi,μk)≥Jave的对象成员xi,作为下一个聚类中心μk;(5)重复步骤(3)和(4),直到完成所有聚类中心的初始化;(6)对聚类簇进行计算。
相比于原方法,该方法能够进一步提高初始聚类中心点分布的均匀性,提高聚类效果的稳定性。
3 粒子群算法
粒子群算法是一种进化计算算法,由Kennedy 和Eberhart 基于最优化原则提出。其基本思想是通过群体中个体之间的协作和信息共享来寻找全局最优解。粒子群算法实现相对简单容易,没有许多参数的调节,适用于连续问题的全局寻优[13]。
粒子群算法核心原理是:粒子群分散在搜索空间中对代价函数局部最优解进行求解,并通过在粒子群中共享局部最优解以确定当前时刻的全局最优解,根据当前时刻和历史状态的解集信息对粒子的速度和位置等进行调整更新。因此粒子群优化共包含局部、全局两个维度,其基本数学描述为
式中,i=1, 2, 3, …,n,n为粒子群的粒子总数;ω为惯性因子;vi为粒子的速度;xi为粒子的当前位置;c1,c2为局部、全局学习因子;rand()为随机修正系数;lbesti, gbesti分别为当前时刻局部最优解、全局最优解的位置。
因此,式(2)可以分为三部分:(1)ω⋅vi为记忆项(惯性项),表示上次速度大小和方向对搜索方向的影响,一般来说,惯性越强,全局寻优能力越强,局部寻优能力越弱,更难陷入局部最优解;(2)c1⋅rand()⋅(lbesti-xi)为局部项,表示全局搜索方向的一部分来自粒子自身的经验,即粒子局部最优对搜索方向的影响;(3)c2⋅rand()⋅(gbesti-xi)为全局项,表示全局搜索方向的一部分来自粒子群的共享信息,即粒子群全局最优解对搜索方向的影响。
rand()表示这种影响是相对随机的,粒子通过自身的经验和全局的经验决定下一步的运动(速度),进而确定下一个位置。以式(1)和式(2)为基础,形成了粒子群算法的一般形式。
对于给定最大迭代次数Gk的优化过程,可以通过线性递减权值(LDW)策略对惯性因子、学习因子进行调整,增强粒子群的全局寻优能力。
式中,g为当前的迭代次数。一般可以取c1+c2=C保证速度的稳定性,其中C为选定常数,与寻优速度及精度有关。
粒子群算法的计算流程如图3所示。
4 倾转旋翼机性能估算模型
对于基于任务效能的倾转旋翼机能力需求指标优化问题来说,一方面需要构建优化问题的约束与边界;另一方面需要构建能够支撑任务仿真的性能估算模型。对倾转旋翼机的总体性能参数估算模型进行简化,使用该模型隐式地描述各项性能参数之间的约束关系,并通过调整技术参数输入来影响性能参数。因为技术参数之间的耦合关系较弱,其范围约束容易通过技术发展曲线进行描述和预测,因此可以通过该方法构建基于该模型的可行设计空间,为优化问题提供约束,同时将其作为性能仿真模块嵌入仿真模拟流程,支撑仿真评估。

图3 粒子群算法流程Fig.3 Flowchart of particle swarm optimization algorithm
针对仿真优化计算需求,梳理了主要技术参数、性能参数,详见表1,本文采用逆向设计的思路,并构建简化后的基于各项技术参数的性能估算方法[14-15],对于不同的精度或研究需求,可以对估算模型进行修正或调整,以适应不同问题的研究需要,倾转旋翼机性能估算流程如图4所示。

表1 主要技术参数、性能参数表Table 1 Table of main technical parameters and performance parameters
4.1 直升机模式性能估算
倾转旋翼机的最大起飞重量为
对倾转旋翼机的旋翼半径进行计算

图4 倾转旋翼机性能估算流程图Fig.4 Flowchart of tiltrotor aircraft performance estimation
式中,kb为旋翼数量。
当地拉力因子fF、功率因子fN为
式中,ρ为当地空气密度。针对每个旋翼进行分析,取考虑垂直增重系数fcz后的当前发动机输出总拉力为T,地效增长系数为fge,则拉力系数为
对诱导速度vi进行计算,进而计算各旋翼的总诱导功率Pin
式中,J0为诱导功率修正系数。取当地发动机输出功率为pH,型阻功率为pxP,则此时即可计算得到当前当地的剩余功率
此时即可计算垂直爬升率vvc及悬停耗油率sfch,当vvc≤0.5m/s时,认为此时到达悬停升限hh,考虑地效增长系数fge即可计算得到最大起降高度hto。
定义前进比μ为前飞速度vf与桨尖速度ωR之比
取前飞状态下旋翼拉力为T,拉力系数CT满足如下关系
进一步对量纲一诱导速度vi进行求解,可以对量纲一诱导功率Pin进行计算。
与悬停模式同理,可根据当地发动机输出功率对剩余功率pre进行计算,进而求解直升机模式斜爬升率vlc。
4.2 固定翼模式性能估算
对机翼面积进行估算
式中,R为旋翼半径,kLR为旋翼直径与机翼展长的比值。此时升力、阻力系数为
式中,vf为前飞速度;CD0为零升阻力;δ为诱导阻力修正因子;CDi为升致阻力。
假定固定翼模式下发动机输出功率主要用于克服前飞气动阻力,忽略其他阻力项,取功率转化到旋翼/螺旋桨的效率为kpD,则此时克服阻力的输出功率为
倾转旋翼机的剩余功率为
此时即可计算斜爬升率vfc、前飞耗油率sfcf、实用升限hc。
输出功率曲线与当地功率的交点即为当地最大速度vmax,对输出功率曲线进行分析,即可得到久航速度、远航速度,进而计算得到航程R、航时E、巡航速度vc等参数。
5 倾转旋翼机能力需求指标优化
5.1 市场需求聚类分析
本文选用了一个共有187个样本的直升机/旋翼机任务需求调研数据集对真实的市场需求进行模拟,数据集包括载荷需求、速度需求、航程需求、起降高度需求、升限需求5个维度。
5.1.1 型号序列需求分析
倾转旋翼机的市场需求差异较大,无法通过某种特定的型号完成对市场的完全覆盖,因此需要对市场需求进行分类,将其整理为若干相对独立的需求簇,分别选用不同的型号进行差异化发展,覆盖倾转旋翼机市场的相关需求。
采用Gap Statistic 判据对最优聚类数kc进行计算[16];当某聚类数k对应的间隔统计量Gapk首次大于Gapk+1及采样标准差sk+1之和时,认为此时存在kc=k。
对聚类紧支测度进行蒙特卡罗(Monte Carlo)采样计算,每个聚类数k执行1000次采样。任务集总欧氏距离平方和(SSE)及间隔统计量Gap随聚类数k的变化曲线如图5所示。
根据Gap Statistic 判据,可以看出当k=4 时,Gap 到达局部峰值,此时Gap4首次大于Gap5及采样标准差s5之和,因此对应选定任务集的最佳聚类数kc=4,即在当前的市场情况下,共需要4型不同的倾转旋翼机以满足市场需求。
5.1.2 能力需求指标分析
针对最优分类情况进行聚类分析,可以计算得到共4个不同任务簇下各特征分位点(对应的需求覆盖率:75%覆盖率、μ+3σ分位点、100%完全覆盖)下各任务簇能力需求表,见表2。
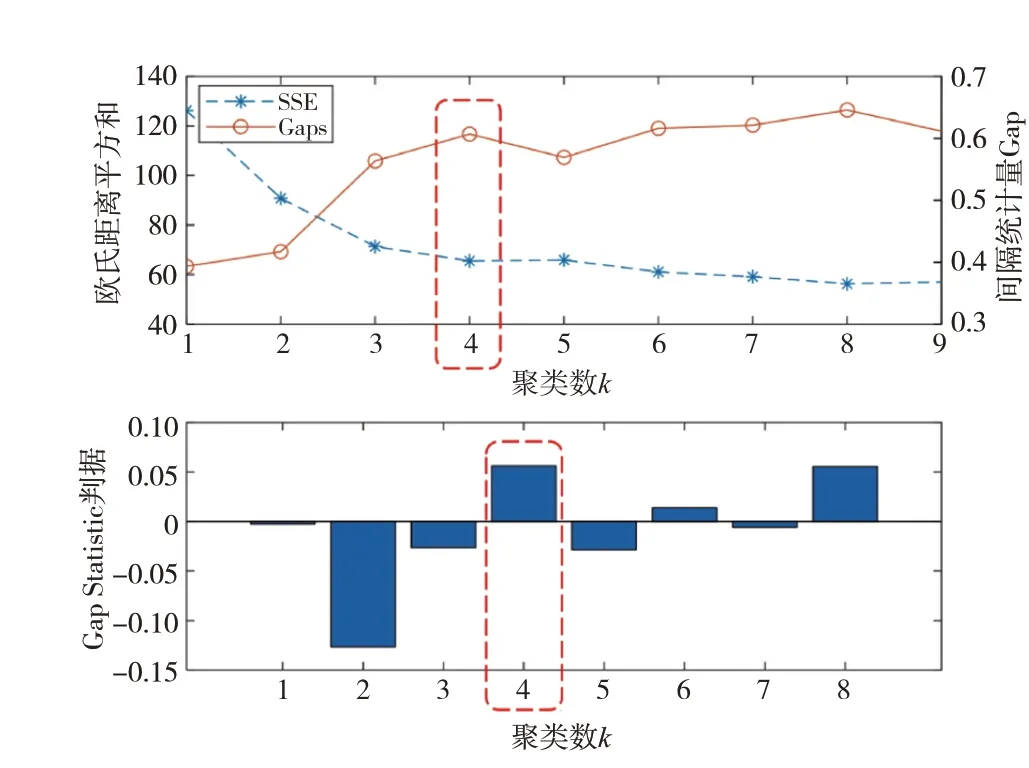
图5 SSE/Gap随聚类数k变化曲线Fig.5 The curve of SSE/Gap changes with the number of clusters k

表2 各任务簇不同分位点下的能力需求表Table 2 Table of capability requirements at different quantile for each task cluster
对性能需求归一化后的相对性能需求如图6所示。可以看出,对于给定的任务簇,可能存在某任务与其他任务差距较大的情况,即异常需求,此时该任务的需求指标相对其他任务明显较大,覆盖该任务所需要的代价显著大于其他任务。通过μ+3σ分位点对异常需求项进行过滤,可以得到各任务簇下对应的最优覆盖率,见表3。
5.2 任务仿真计算
选取任务簇2作为未来民用倾转旋翼机的首要发展方向。通过μ+3σ分位点对异常需求项进行过滤,根据得到的能力需求指标构建典型航空交通运输任务剖面,如图7 所示,并对能力需求指标优化提供仿真场景及约束。

图6 各任务簇归一化性能需求对比Fig.6 Chart of normalized performance requirements comparison for each task cluster

表3 各任务簇最优覆盖率对比Table 3 Table of optimal coverage rate for each task cluster
倾转旋翼机在选定任务想定下的任务流程为:(1)倾转旋翼机搭载5041kg 舱内载荷,从A 点垂直起飞,起飞机场当地海拔高度2750m;(2)短暂爬升至安全高度后,倾转旋翼机以固定翼模式爬升至5800m 高度至B 点,爬升距离为10km;(3)倾转旋翼机在5800km 海拔高度,以巡航模式飞行1230km至C点;(4)以固定翼模式从C点下降至D点,完成着陆,总航程1260km。
对该任务剖面想定进行仿真计算,以运载量W、总任务耗时ttot、总任务耗油cf为主要任务表现指标,构建任务效能评估方法
则效能指标E能够表现该(选定能力需求指标下)倾转旋翼机单位油耗对其单位时间运力的贡献。
以此为优化目标,优化得到的能力需求指标序列即为在满足该任务簇能力需求下“油耗—单位时间运力”转化比最高的倾转旋翼机能力需求指标序列,可以用于支撑方案论证或指导概念方案设计。
5.3 能力需求指标优化
基于粒子群算法,开展双倾转旋翼机能力需求指标优化研究,迭代优化曲线如图8所示,优化结果见表4、表5,其中各项性能指标为海平面高度下性能表现指标。优化后的倾转旋翼机在任务中的表现参数见表5。
综上可以看出,在满足任务簇2能力需求的情况下,能力需求指标优化算法可以有效地将任务需求参数转化为能够用于指导型号论证及概念方案设计的技术指标、性能指标参数,且保证有较好的效能水平。

图7 基于性能需求约束的交通运输任务剖面Fig.7 Transportation mission profile based on performance requirements constraints

图8 任务效能—优化代数变化曲线Fig.8 Curve of task efficiency-optimization generation variations
5.4 优化模型的扩展应用
本研究构建的优化方法流程除适用于倾转旋翼机外,还具有较强的可拓展性,可以通过调整倾转旋翼机/直升机模型、效能仿真模型(见图1),对其他构型飞行器进行分析优化。
以常规构型直升机为例,构建直升机悬停、前飞等模式下的性能估算模型[14],以前述倾转旋翼机吨位、载荷能力为参考,以任务效能最大化为优化目标,进行迭代优化,直升机任务剖面如图9所示。直升机在选定任务想定下的任务流程为:(1)直升机搭载5041kg 舱内载荷,从A 点垂直起飞,起飞机场当地海拔高度2750m;(2)短暂爬升至安全高度后,直升机在3500m 高度从B 点巡航飞行至C 点;(3)直升机从C点下降至D点,完成着陆,总航程650km。优化迭代曲线如图10所示,优化结果见表6、表7。
综上可以看出,通过将倾转旋翼机模型、效能仿真模型替换为直升机模型、直升机任务效能仿真计算模型,可以对常规构型直升机的各项技术参数、性能参数进行迭代优化,优化方法具有良好的可扩展性。其中模型精度越高,优化效果越好。

表4 优化输出技术参数、性能参数Table 4 Table of technical parameters and performance parameters optimized

表5 优化结果任务仿真输出统计Table 5 Table of simulation outputs for optimized results of tasks
6 结论
本文选用了一个共有187个样本的直升机/旋翼机任务需求调研数据集对真实的市场需求进行模拟,以双倾转旋翼机为例,针对能力需求指标参数进行了优化计算。

图9 直升机交通运输任务剖面Fig.9 Transportation mission profile for helicopter
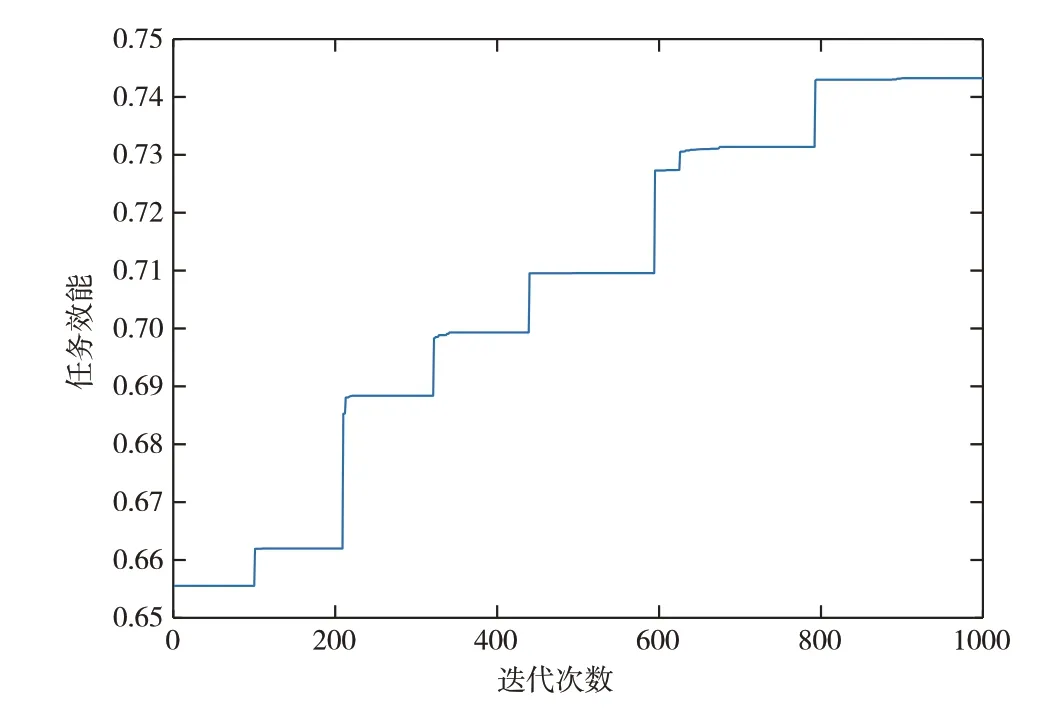
图10 直升机任务效能—优化代数变化曲线Fig.10 Curve of task efficiency-optimization generation variations for helicopter
(1)基于K-Means 聚类分析方法及Gap Statistic 判据,未来以倾转旋翼机为代表的民用高速旋翼机市场需求主要可以由4种不同型号覆盖,应用场景主要集中在平原、次高原地区,载荷需求从500kg到22.3t不等。
(2)倾转旋翼机能力需求指标优化方法能够综合考虑各性能参数、任务表现参数之间的耦合关系,能够考虑不同指标项之间的矛盾需求,输出能够用于指导型号论证及概念方案设计的技术指标、性能指标参数。
(3)本文提出的基于效能仿真和粒子群算法的优化方法流程可以有效适用于倾转旋翼机、常规构型直升机等航空装备,优化结果相对合理,具有良好的可扩展性。

表6 直升机优化输出技术参数、性能参数表Table 6 Table of technical parameters and performance parameters optimized for helicopter

表7 直升机优化结果任务仿真输出统计Table 7 Table of simulation outputs for optimized results of tasks for helicopter
