基于套索驱动机械臂柔性伺服系统抑振控制*
2023-09-25刘青宜张志峰
刘青宜,张志峰,王 宁,赵 飞
(1.许昌职业技术学院,许昌 461000;2.郑州轻工业大学物理与电子工程学院,郑州 450002;3.河南钜控消防技术有限公司,许昌 461000;4.太原理工大学机械与运载工程学院,太原 030024)
0 引言
随着机器人技术的不断发展,轻质化的机械臂在工业装配、太空探索等领域获得更多的关注。为了减轻机械臂的质量,先进的机械臂多采用线缆驱动代替传统的关节减速器。相比较与使用关节减速器的机械臂,采用线缆驱动的机械臂可以采用电机后置的设计方法,进一步的减轻机械臂的质量[1-2]。类似于线缆驱动,套索可以驱动机械臂的转动。吴青聪等[3]将套索驱动应用于外骨骼机器人。尹猛等[4]提出了由套索驱动的灵巧手机器人。此外,吴浩延等[5]建立了套索传动机械臂的传动特性模型。随着套索传动研究的不断深入,套索传动中的柔性问题得到了广泛的关注[6-7]。此外,机械臂运动过程中的位置变化会导致伺服系统具有明显的时变特性特性。这种负载转动惯量的时变会加剧机械臂转角控制的难度。LI等[8]认为机械臂的位姿变化会导致伺服系统的转速波动。因此,机械臂伺服系统中的传动柔性和负载转动惯量的时变特性成为当前机器人驱动系统研究的热点问题。
SPONG等[9]创造性的提出了使用双惯量模型表征伺服系统的传动柔性,并提出了柔性关节的概念。YANG等[10]根据柔性关节的概念,进一步的提出了变刚度的柔性关节,并考虑了摩擦力矩的影响。李小彭等[11]利于双惯量模型建立了,巡检机器人伺服系统的动力学模型。此外,SHANG等[12-13]提出了包含柔性关节的单连杆双柔性机械臂的概念。基于此,可以利用双惯量模型表示考虑传动柔性的伺服系统。这为套索驱动机械臂伺服系统的动力学建模提供了恰当的理论模型。
为了减小套索驱动机械臂伺服系统的跟踪误差需要设计相应的控制策略。在伺服系统控制策略设计中,PI控制策略仍是最为常用的控制算法。李小彭等[14]针对柔性负载的伺服系统提出了极点整定的PI控制策略。但是固定参数的控制策略无法适合参数时变的动力学系统。基于此,SHANG等[15]使用模糊规则实时调整控制器参数,进而减小伺服系统的转角误差。由此,为了获得较高的控制精度,可以使用模糊规则实时调整控制器参数。
本文首先建立考虑传动柔性的套索驱动机器臂伺服驱动系统的动力学模型。采用极点配置策略对PI控制器参数进行优化,用以确定不同惯量比情况下PI控制器参数。模糊自适应控制策略被用于实时改变控制器参数,以抵消转动惯量变化引起的速度波动。通过仿真得到了机械臂柔性关节伺服驱动系统负载端转速输出曲线,分析了不同惯量比、极点阻尼系数对于系统输出的影响。最后进行机械臂样机控制实验,通过与PI控制策略对比,验证了本文所提出模糊整定制策略应用的有效性。
1 柔性伺服系统动力学建模
本文所设计的套索驱动机械臂如图1所示,它由6个连杆和6个转动关节组成。
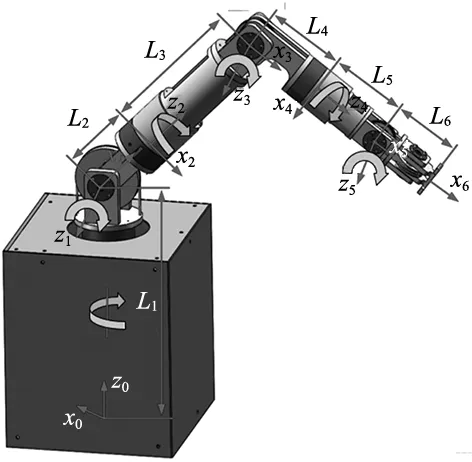
图1 套索驱动机械臂整体结构图
套索驱动机械臂的详细动力学建模可根据拉格朗日动力学方程推导。套索驱动机械臂的动力学方程详细的推导过程可参考文献[6]。根据文献[6],可得到套索驱动机械臂的动力学方程:
(1)
式中:Dij为关节i和关节j之间的耦合量系数,Dijk为关节之间的向心力项、哥氏力项系数,Di为关节i处重力项系数。
机械臂通过双套索传动可以实现驱动电机与关节的分离,进一步减轻机械臂的本体质量。双套索传动包含两根套管与两根柔索,可以传递力和位移。其传动原理如图2所示,电机与减速器连接,主动轮安装于减速器输出轴上,从动轮置于关节中。电机的转动经减速器后传递到主动轮,然后主动轮经套索传动带动关节上的从动轮转动,进而驱动关节负载运动。
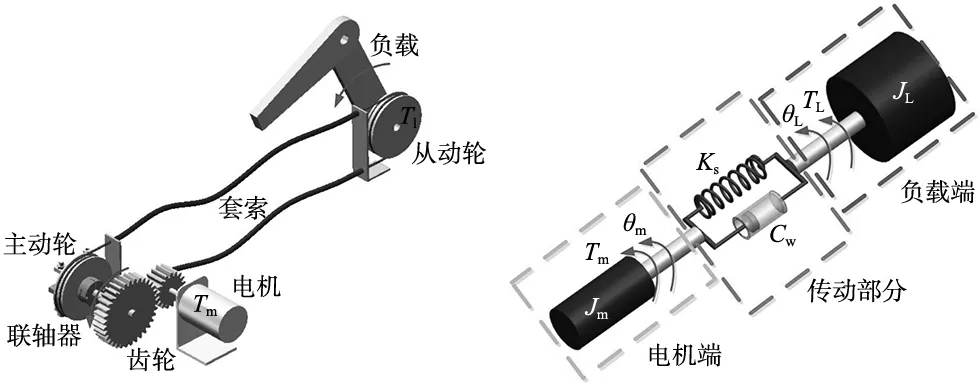
图2 套索传动示意图 图3 柔性伺服驱动示意图
在机械臂的关节伺服驱动系统中,电机与负载通过减速器、弹性联轴器和套索连接起来。弹性联轴器和套索具有一定的柔性,因此可将传动部分等效成扭簧-阻尼模型。扭簧一端连接电机,另一端连接负载,简化后的柔性关节伺服驱动系统如图3所示。
电机端的转动惯量有两个部分组成,一部分为电机本身所具有的转动惯量,另一部分是负载的转动惯量,该部分转动惯量与机械臂惯性矩阵和减速比有关。因此机械臂单关节电机负载为:
(2)

柔性关节伺服驱动系统的动力学方程为:
(3)
式中:Bm为电机转动阻尼,θm为电机转角,Ks为关节扭转刚度,Cw为关节阻尼,θL为负载转角,BL为负载转动阻尼,Tm为电机电磁转矩,JL为负载转动惯量,TL为负载外加力矩。
忽略电机、负载及传动系统的阻尼系数后得到的方程为:
(4)
式中:ωm为电机转速,ωL为负载转速,Ts为轴矩。
根据式(4)可得到电机转速到电磁转矩的传递函数为:
(5)
将式(5)写成如下形式:
(6)
式中:ωa表示反谐振频率,ωn表示谐振频率,R表示负载电机惯量比,其定义如式(7)~式(9)所示:
(7)
(8)
(9)
2 柔性关节伺服驱动系统控制策略
2.1 柔性关节PI控制策略
根据电机三环(电流环-速度环-位置环)控制策略,使用PI控制器对电机进行控制。不考虑电流内环影响[16],机械臂柔性关节PI控制的速度环与位置环控制框图如图4所示。

图4 柔性关节的PI控制框图
图中Kpp、Kpv与Tiv为控制器参数,Kt为扭矩常数。
根据图4可得到负载端输出速度与柔性关节伺服驱动系统速度外环输入之间的传递函数,其表达式为:
(10)
同理,根据图5可得出柔性关节伺服驱动系统位置外环输入与负载端角度输出的传递函数,如式(11)所示。
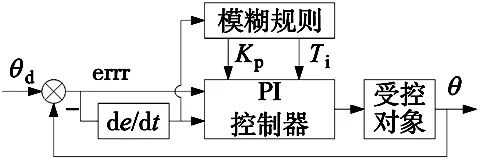
图5 模糊自适应PI控制器结构示意图
(11)
将柔性关节伺服驱动系统速度外环传递函数中分母的表达式写成如下形式:
(12)
式中:ωa1、ωb1为极点的自然频率,ξa1、ξb1为极点阻尼系数。
套索驱动机械臂柔性伺服系统闭环传递函数可写为:
(13)
根据式(12)、式(13)中分母对应项系数相等可以得到式(14) ~式(17)。
(14)
(15)
(16)

(17)
本文采用相同阻尼系数的极点配置法,设计柔性关节速度环PI控制器参数。所谓相同阻尼系数的极点配置法,即系统闭环传递函数具有相同的阻尼系数。速度环控制器参数的表达式如式(18)和式(19)所示。
(18)
(19)
极点阻尼系数和自然频率的取值将决定柔性关节PI控制的速度外环电机输出转速最大超调量、峰值时间和调整时间。
2.2 模糊整定控制策略设计
模糊自适应PI控制器以误差和误差变化作为输入量,以满足不同时刻的误差对PI控制器参数自整定的要求,自适应模糊PI控制器的结构如图5所示。
PI控制器参数模糊自整定是找出PI控制器参数与误差和误差变化量之间的模糊关系。通过不断的检测误差和误差变化量,依据模糊控制原理对控制参数进行在线修改,最终使机械臂柔性关节获得良好的动、静态性能。
模糊自适应PI控制算法表达式为:
(20)
采用乘积推理机,规则的隶属函数表达式为:
fij=ui(e)·uj(ec)
(21)
式中:ui(e)和uj(ec)分别为误差和误差变化律的隶属度。假设误差和误差变化律各有3个隶属函数,共有9条规则。
根据控制器参数Kpv和Tiv的模糊规则表,如表1和表2所示,可获得修正后的控制器参数为:

表1 控制器参数ΔKp模糊规则表

表2 控制器参数ΔTi模糊规则表
(22)
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理与查表运算,完成对PI控制器参数的在线自校正,其工作流程图如图6所示。
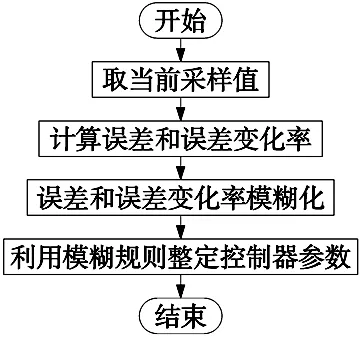
图6 模糊自适应PI控制流程图
3 数值仿真分析
3.1 关节刚度对转速输出的影响
机械臂依靠套索传动实现关节的转动,但套索的材料与曲率半径等因素均会影响关节刚度。这种刚度影响会致使电机端和负载端输出转速发生波动,进而影响机械臂的运动精度。本文分别以单位阶跃信号和正弦信号作为输入,选用4种不同的刚度进行仿真实验。柔性关节电机端和负载端在单位阶跃信号下的输出结果如图7所示;电机端和负载端在单位正弦信号下的输出结果如图8所示。
(a) Ks=200 (b) Ks=400
(a) Ks=200 (b) Ks=400
由图7和图8可知,当柔性关节刚度较小时电机端与负载端存在较大的转速误差,随着刚度的逐渐增大,电机端与负载端的转速误差逐渐变小。由此可知关节柔性会导致电机端输入转速与负载端输出转速间的误差,且误差随着刚度的增大而减小。
3.2 极点阻尼系数对转速输出的影响
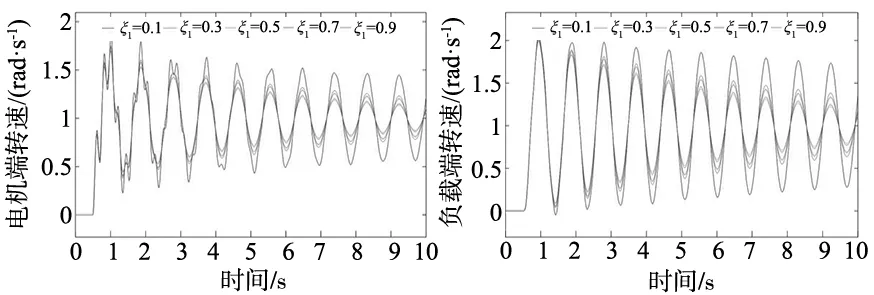
控制器参数取值由极点阻尼系数决定,通过调整阻尼系数可以调整控制器参数。在机械臂处于3种不同惯量比的情况下,进行不同极点阻尼系数对柔性关节转速输出影响的仿真实验。在单位阶跃信号和正弦信号输入下,柔性关节电机端和负载端的转速曲线如图9和图10所示。

(a) 单位阶跃信号输入下电机端输出转速 (b) 单位阶跃信号输入下负载端输出转速
(a) 单位阶跃信号输入下电机端输出转速 (b) 单位阶跃信号输入下负载端输出转速
由图9可知,在相同阻尼系数的极点配置策略下,在ξ1∈(0,1)的区间上,随着极点阻尼系数的增大,系统超调量减小,机械谐振程度减弱。当阻尼系数ξa1取值较小时电机和负载转速达到理想后会出现一定的波动,不利于柔性关节伺服系统控制。当阻尼系数ξa1为0.5时,阻尼系数对系统的影响不大。对比图10可知:随着惯量比的增大,电机输出转速达到理想转速后速度的波动程度增强,欠阻尼性逐渐增强,此种现象在阻尼系数ξa1取小值时尤为明显。
3.3 模糊自适应控制策略的应用
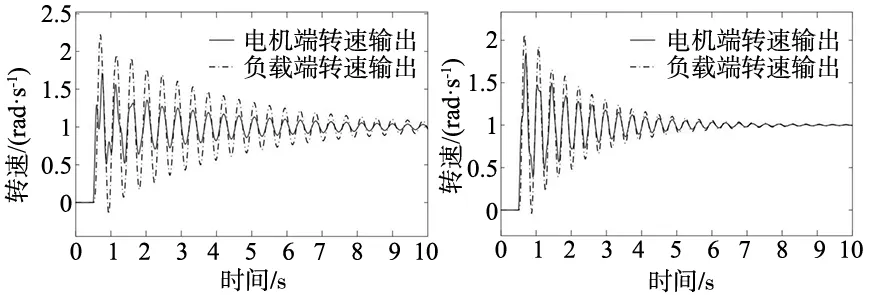
根据相同阻尼系数的极点配置策略,通过适当选取极点阻尼系数确定机械臂不同惯量比情况下的控制器参数。首先确定机械臂初始和终止运动状态下柔性关节伺服系统的最佳控制器参数。接下来应用模糊自适应控制策略实时改变控制器参数,以抵消转动惯量变化引起的速度波动,从而改善柔性关节的转速输出。开展应用模糊自适应控制策略的柔性关节控制实验,相关参数如表3所示。在单位阶跃信号和正弦信号输入下,柔性关节电机端和负载端的转速输出曲线以及控制参数随时间的变化规律,如图11和图12所示。
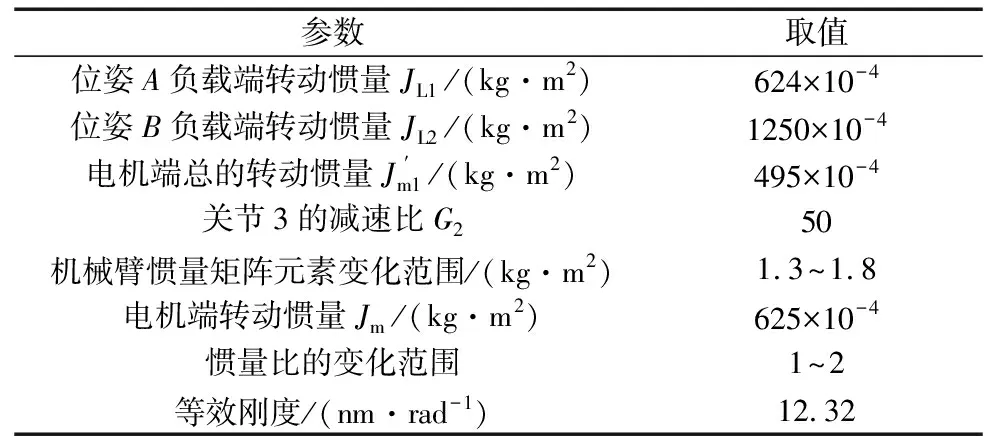
表3 柔性关节参数表

(a) 电机端输出转速 (b) 负载端输出转速

(a) 电机端输出转速 (b) 负载端输出转速
由图可知,使用模糊自适应控制策略相较于PI控制策略能有效地减小因负载端转动惯量时变特性而引起的速度波动,使柔性关节伺服系统能够获得稳定的转速输出,进而保证机械臂的运动精度。
4 机械臂样机控制实验
4.1 样机平台
本文搭建的机器人样机试验平台如图13所示,驱动电机采用自带减速器的舵机ASME-MRB(最大输出扭矩38 N·m),柔索采用直径为1 mm的钢丝绳,套管采用长方形弹簧丝绕成的外径2.2 mm、内径1.2 mm螺旋套管[6]。详细的控制原理可参见文献[6]。

图13 实验样机
4.2 机械臂关节控制实验
关节1为电机经减速器直驱,为了测试套索驱动机械臂的性能,重点对机械臂的2~6关节进行了运动实验。如图14所示,图14a为关节2由15°到65°运动实验,图14b为关节3由-35°到35°运动实验,图14c为关节4由45°到135°运动实验,图14d为关节5由-35°到35°运动实验,图14e为关节6由-90°到45°运动实验,由实验可知,运动过程中套索间无干涉情况发生,各关节均能正常运动。

(a) 关节2运动 (b) 关节3运动
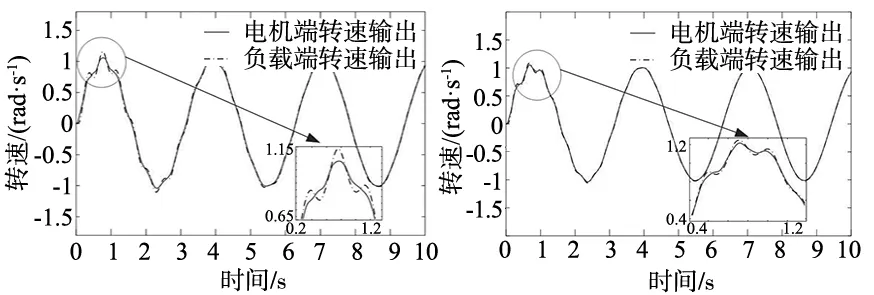
以机械臂关节3为实验对象,负载端初始运动状态和终止运动状态如图2所示,分别采用PI控制策略和模糊自适应控制策略进行控制实验。电机速度环在单位阶跃信号的输入下,其负载端输出速度、输出转角和误差如图15所示。为了解机械臂的跟踪性能,在电机速度环输入单位正弦信号,其负载端输出的速度、转角和误差如图16所示。通过图15和图16可知,模糊自适应的控制策略能够明显减小跟踪误差、有着更快的收敛速度和更高的跟踪精度,可以提高系统的控制性能。

(a) 负载端输出速度 (b) 负载端输出转角

(a) 运动初期负载端转速 (b) 负载端转速
5 结论
本文将套索传动应用于机械臂,提出了一种电机后置的6-DOF轻型机械臂设计方案。参照人手臂的肩关节、肘关节与腕关节确定了机械臂的构型,对驱动模块与机械臂关节进行了设计。根据柔性套索的传动原理建立了机械臂的柔性关节伺服传动系统的动力学模型。为了提高机械臂运动控制精度,采用模糊自适应的控制策略,进行了机械臂关节控制实验。
通过实验验证了基于套索传动来设计机械臂的可行性,并得到如下结论:①本文所提出的极点配置的控制策略能够清楚地看出PI控制器参数与系统时域评价指标的关系,通过调整PI控制器参数可以减小机器臂的速度波动。②对于套索传动的柔性关节,其电机端及负载端的转动惯量与机械臂的位姿有关,应在设计PI调节器参数时考虑惯量比的变化。③相比较于PI控制策略,模糊自适应控制策略能够更加有效地减少机械臂运动过程中的控制误差。
