基于尺度律的轻量化协作机器人关节传动系统优化选型*
2023-09-22林家春员若男
林家春,苏 浩,员若男
(1.北京工业大学 材料与制造学部,北京 100124;2.北京市精密测控技术与仪器工程技术研究中心,北京 100124)
0 引 言
随着协作机器人得到广泛应用,人们对机器人技术也在不断提出新要求。新一代的协作机器人应具有高效率、高功率密度比、轻量化等特点[1],尤其是在移动和可穿戴机器人(例如外骨骼)领域,高效率和低重量至关重要。
协作机器人关节是协作机器人总重量的主要来源[2],其核心部分是由电机和谐波减速器组成的传动系统,决定整个关节的重量和性能[3]。因此,从源头出发,实现关节轻量化设计的关键是对电机和减速器进行优化选型。
传统的电机和减速器的选型通常采用顺序法,即根据负载特性,从备选目录中选择减速器和电机[4]。传动比选择的原则是在满足性能要求的前提下,尽可能降低电机尺寸,以节约成本。这种方法由于需要从初始选择开始,在所有可能的组合中进行枚举或试错,需要耗费大量时间才能找到合适的组合,因此其效率非常低下;并且该方法也不能保证探索所有可能的解决方案,其会导致解决方案过大或者次优,从而不能找到最佳的电机和减速器的组合[5]。
针对机电系统电机和减速器的优化选型问题,国内外学者提出了多种解决办法。
PASCH KA等人[6]引入了惯量匹配的概念,并在理想条件下,将其用于选择负载加速度最大的传动比。VAN D S H J等人[7,8]通过将扭矩、速度和传动比进行了标准化处理,解决了传动系统的设计问题。ROOS F[9]建立了电机和减速器的数据库,并从中提取了选型参数(如尺寸、重量),设计人员可以根据不同的设计需求对数据库中的信息进行筛选,最终得到满足要求的组合。ZHOU L[10]在传动系统建模过程中,考虑了电机和减速器的特性,包括传动比、齿轮惯量、电机惯量和齿轮效率等,对轻量化机器人机械臂传动链进行了优化设计。CUSIMANO G[11]在纯惯性负载的情况下,通过计算符合重量最小化所需连续扭矩最佳齿轮比的方法,以此来选择合适的电机和减速器。MEONI F[12]提出了机电伺服轴模型,该模型从商业手册中提取了数据,对影响电机和减速器运行的参数进行了数据拟合,在此基础上提出了一种连续优化程序,采用该程序可以找到各种目标函数的最佳电机和减速器组合。RICHIEDEI D等人[13]提出了一种基于尺度律的方法,该方法改进了最佳齿轮比的概念,采用尺度律说明了电机、减速器和传动比之间的主要关系,最终得到了电机和减速器的最佳组合。
以上文献中提到的优化方法大都是用于对机器人关节传动系统的传动比进行优化,但在优化过程中,同时考虑重量、尺寸的研究并不多见。
近年来,优化设计已经成为加快协作机器人产品上市的重要途径[14]。因此,笔者以实现协作机器人关节的轻量化设计为目标,提出一种基于尺度律的优化选型方法。
首先,建立传动系统的动态模型,构建以减速器和电机重量最小化为目标的优化函数;其次,构建尺度律模型将传动系统所涉及的相关特性参数简化,并通过所建立的电机和减速器的数据库,对尺度律模型的正确性进行验证;最后,采用具体选型实例对该方法的有效性进行验证。
1 传动系统特性及要求
1.1 关节传动系统建模
一个通用的伺服传动系统模型可以通过伺服电机、传动装置和负载三个关键要素来表示[15]。
传动系统模型如图1所示。
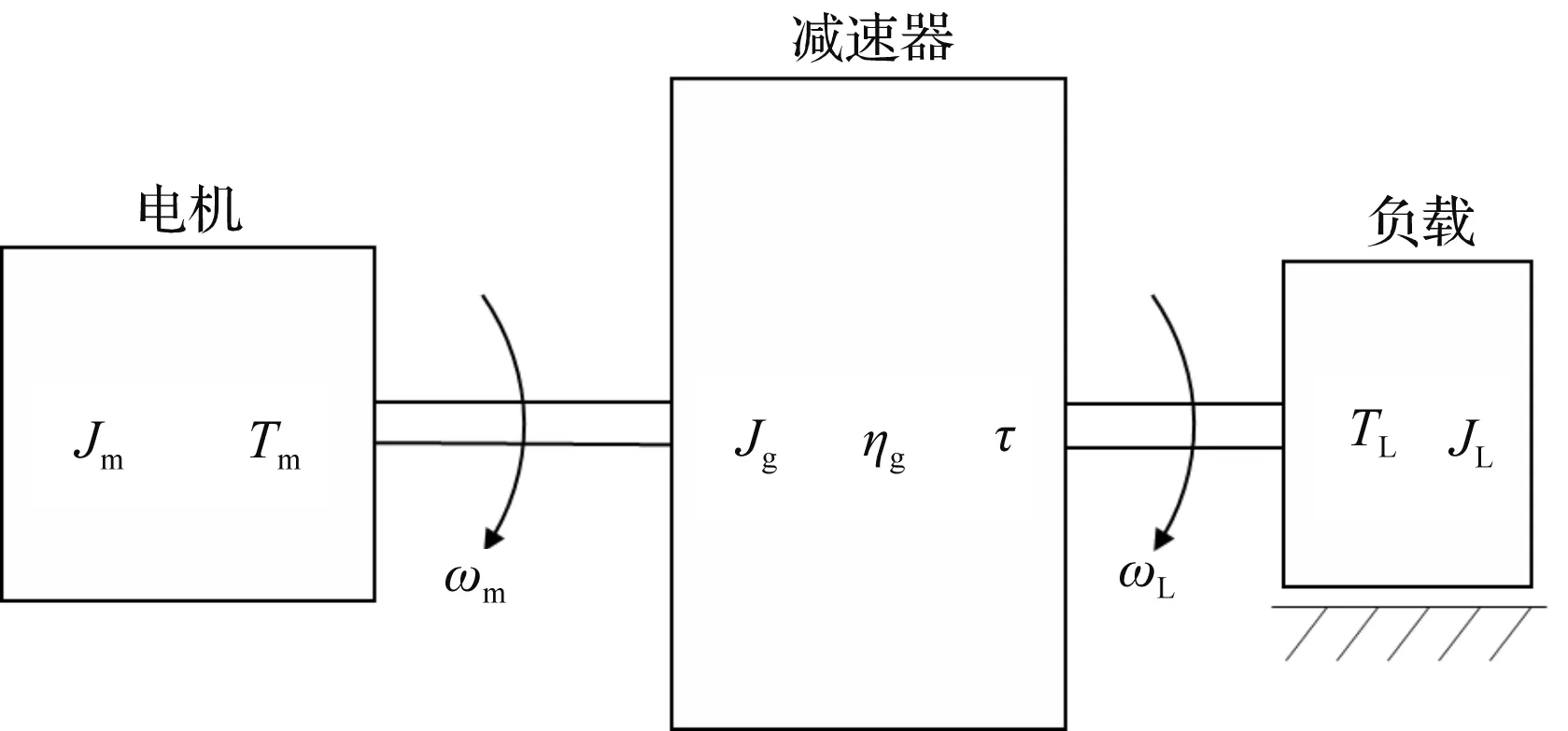
图1 传动系统模型
该模型可以代表多种机电系统,具有普遍适用性。协作机器人关节也可以用该模型进行表示。
笔者将图1中的伺服传动系统的动态模型写成扭矩平衡方程。在恒定的负载条件下,电机驱动指定负载所需的电机扭矩Tm(t)为:
(1)

其中:
(2)
式中:ηd为机械效率;ηr为正向的机械效率。
考虑机械效率不同的流动方向对伺服驱动系统的选择十分重要[13]。TL是由负载惯性转矩、黏性摩擦力和外部扭矩组成的合力,其计算公式如下:
(3)
式中:Te为负载扭矩;JL为负载的转动惯量;kf为黏性摩擦系数;ωL为负载的转速。
负载的特性在进行选型之前是已知的,它取决于负载的运动曲线。通过将负载的运动曲线和这些模型用于表示传动装置和负载之间外部扭矩,可计算得到TL。
根据式(1)可知,驱动给定负载所需的电机扭矩取决于负载、电机和减速器的惯量。
1.2 电机选择标准
协作机器人关节电机通常采用永磁同步电机(perma-nent magnet synchronous motor, PMSM)。为了保证电机能够驱动负载,电机的选择必须满足如下三个条件。
电机在运转过程中由于黏性摩擦、铁损和磁滞产生热量,且电机温度会随速度增加而增加[16],为防止电机过热,一个周期T内所需电机转矩的均方根值(RMS)应小于等于电机的连续转矩,表示如下:
Tm,rated≥Tm,rms
(4)
其中:
(5)
将式(1)、式(5)结合,可以得到电机额定转矩的约束条件为:
(6)
负载曲线的最大扭矩值必须小于或等于电机的额定扭矩值:
Tm,peak≥Tm,max
(7)
其中:
(8)
电机的最大转速必须高于负载曲线所需的最大速度:
ωm,max≥ωL,max
(9)
式(4)、式(7)、式(9)表示伺服驱动系统中的任何电机选择时必须满足的约束条件。
1.3 减速器选择标准
伺服驱动系统应用经常使用三种减速器:传统齿轮副、行星齿轮系和谐波传动[17]。谐波减速器凭借其传动比范围大、承载能力强、运动精度高等优点被广泛应用于协作机器人关节中。
在选择谐波减速器时,通常需要考虑以下三个条件:
Tg,rated>TL,maxfs
(10)
安全系数fs具体选择数值由协作机器人实际应用领域和每小时的工作循环数决定,通常有:
fs>1.4
(11)
减速器的额定扭矩要大于负载的平均扭矩,即:
Tg,rated>TL,Rmc
(12)
谐波减速器通常使用TL,Rmc值来计算额定扭矩,该值是对谐波减速器结构部件累计疲劳的量度[18],故其数值与减速器的寿命有关。其计算标准已经用于机器人应用中,其中TL,Rmc的计算公式如下:
(13)
假定电机能驱动给定负载,在满足以上减速器的选择条件下,允许的最大传动比为:
(14)
式(10)、式(12)和式(14)表示了伺服驱动系统中任何减速器选择时必须满足的条件。
横纵比能反映出电机和减速器对关节尺寸的影响,反映机器人关节的扁平程度。为防止选型得到的关节形状与实际不符,笔者根据协作机器人关节实际应用对横纵比进行约束,表示如下:
(15)
式中:lm为电机长度;dg为减速器直径
以上电机和减速器的选择条件具有普遍性,适用于任何传动系统选型。
1.4 目标函数优化
优化目标是在满足驱动负载性能要求的基础上,从建立的电机和减速器数据库中找到重量最轻的组合。因此,笔者将目标函数f(x)定义为电机重量mm和减速器重量mg的总和,可表示为:

(16)
式中:变量x为数据库中所有满足驱动负载条件的电机sm和减速器sg的组合。
从式(16)可知,优化函数涉及众多参数。
为了能清晰、快速有效地找到满足优化目标的电机和减速器的组合,方程式中涉及的参数必须减少。为解决该问题,笔者采用尺度律对传动系统的每个组件重新建模,将涉及多个参数的优化目标函数减少为仅由2个参数表示:电机堵转转矩Tstall和减速比τ。
2 尺度律及其应用
2.1 尺度律介绍
尺度律(也称相似律),是表示两个相互联系的物理量之间的函数关系的尺度律模型[19]。尺度律被应用于许多不同领域,如微系统、力学、液压、流体力学等,其被用来确定或调整系统的尺寸,评估系列化产品的开发成本[20]。
在设计问题中使用尺度律是非常有利的,因为它大大减少了某些物理量所涉及的参数数量,从而避免出现由于物理量的模型过于复杂而导致系统无法使用[4]的情况。许多文献中使用尺度律对机电一体化产品进行分析设计与优化,并应用于机器人系统、电机、无人机等设备中。
尺度律是代数模型,通常采用幂指数的形式:
(17)
y*与x*的计算分别为:
(18)
式中:y为所研究的参数;xi为组成研究参数中具有代表性的独立性参数;i为参数的数量;xref,yref为假定的参考值[21]。
笔者采用尺度律,将电机和减速器的参数表示为其尺寸的参数的模型。这些模型用于表示τ、Tstall与Jm、mm、Tg,rated、mg、Jg之间的关系。
尺度律模型的评估和验证的主要数据来源是电机和减速器厂家目录中的技术参数数据,并使用最小二乘法拟合来获得尺度律模型参数。文中所提出的尺度律模型对任何其他几何形状仍然有效。
2.2 电机尺度律
2.2.1 电机转动惯量尺度律模型
文献[21]指出,电机的堵转转矩的计算公式为:
(19)
式中:C为电机的利用率;lm为电机长度;rm为电机半径。
电机转动惯量的计算公式为:
(20)
式中:ρm为电机密度;τ为减速比。

(21)
为了验证该尺度律模型的准确性,笔者采用最小二乘法对2个参数进行拟合,参数数据来自建立的电机数据库。拟合结果如图2所示。
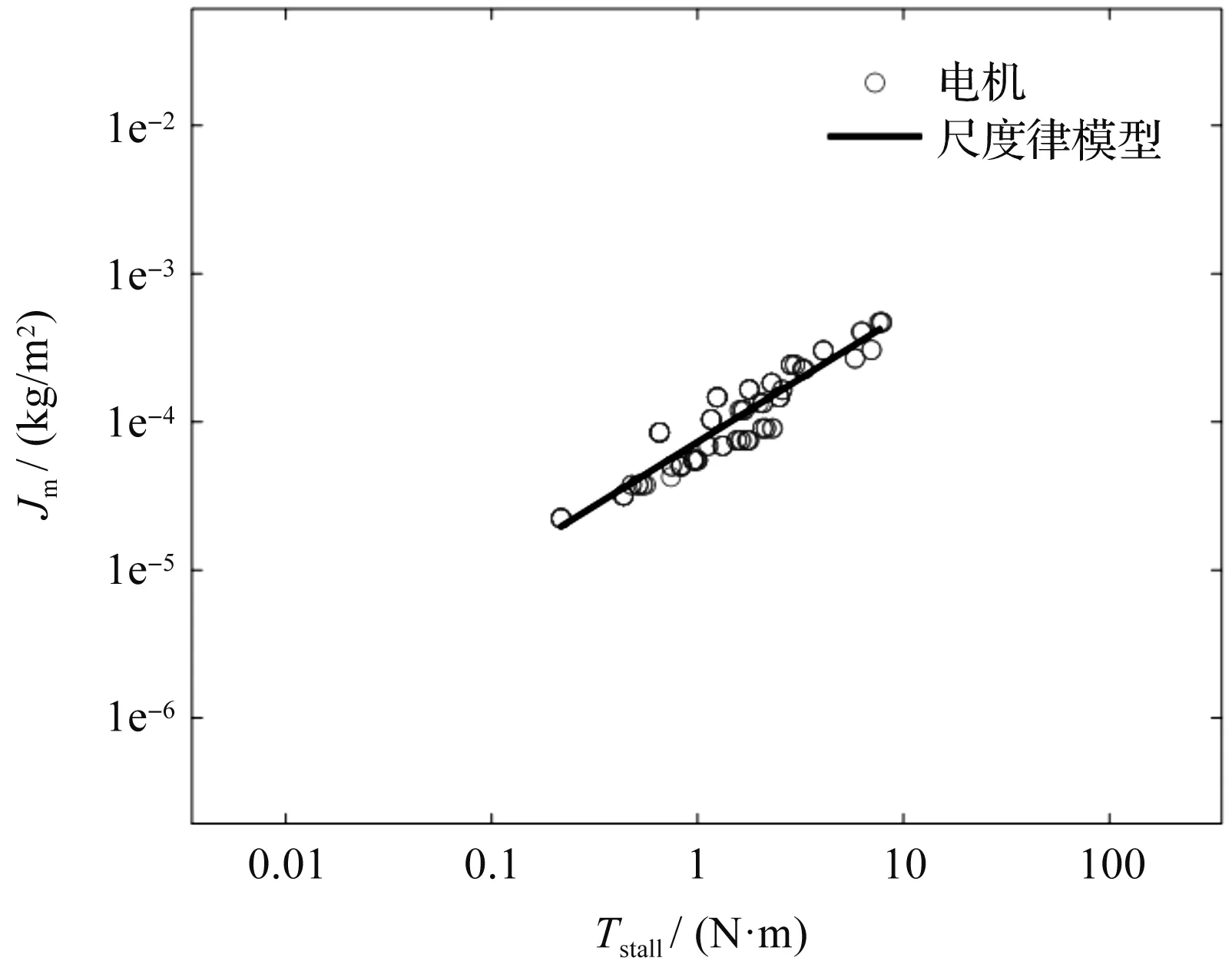
图2 电机转动惯量的尺度律模型与实际数据对比
图2中:黑线是根据尺度律模型拟合得到的值,圆圈是从数据库中得到的电机数据。
式(21)中am是最小二乘法拟合电机数据得到的系数值。从拟合的结果中可以看出,实际数据点与所提出的尺度律几乎是一致的,从而验证了该尺度律模型的准确性。
2.2.2 电机重量尺度律模型
文献[16]得出了电机的额定转矩与转子半径和长度的关系式:
(22)
式中:Cm为在特定的电机类型和相同的冷却条件下的恒定常数值。
而电机重量的计算为:
(23)
mm=anTm,rated
(24)
式中:an为拟合得到的系数值。
同样,笔者采用最小二乘法对该模型进行拟合验证,拟合结果如图3所示。
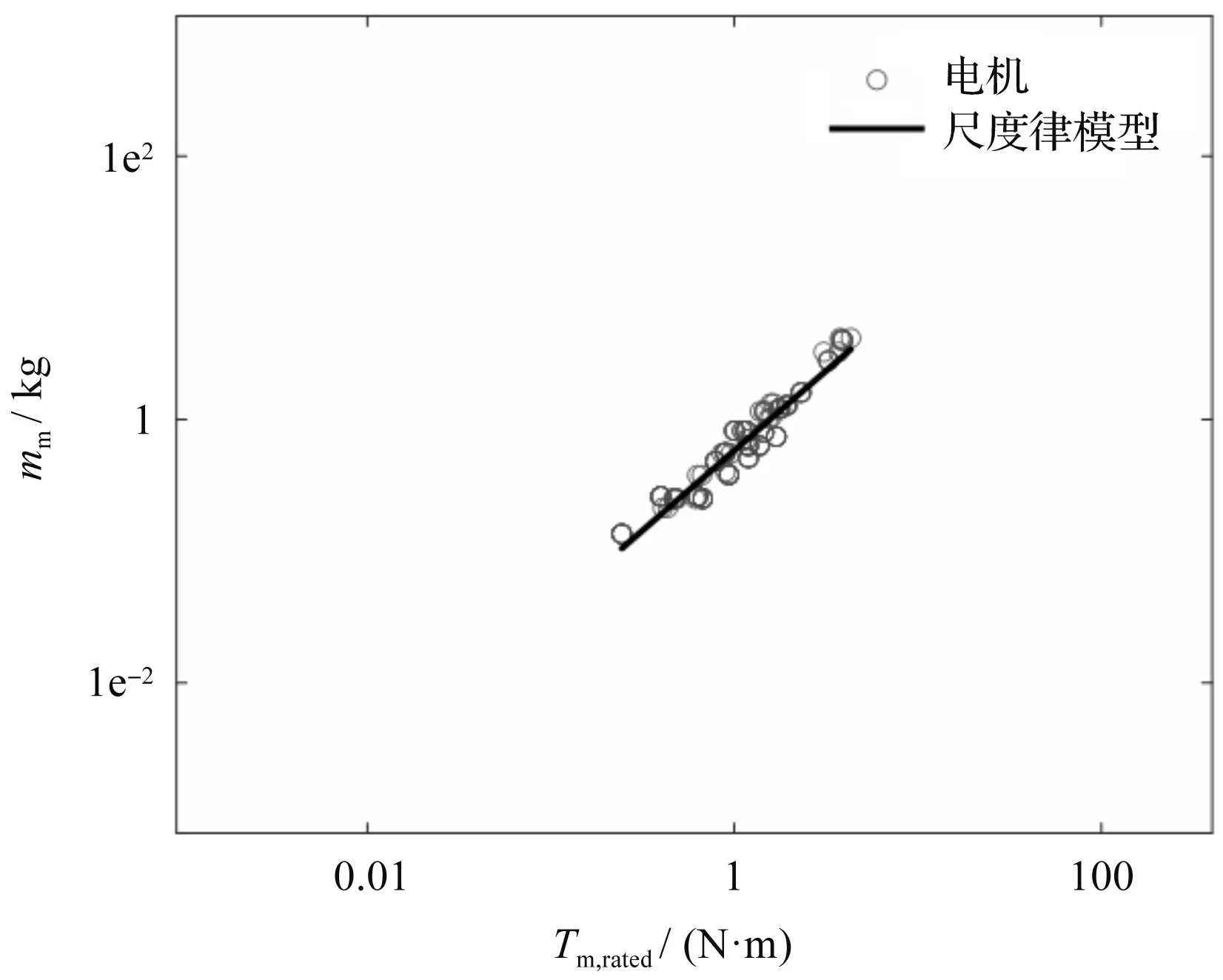
图3 电机重量的尺度律模型和实际数据对比
2.3 减速器尺度律
2.3.1 减速器重量与转动惯量尺度律模型
对于减速器重量与转动惯量的尺度律模型,同样是笔者将减速器的几何尺寸与其相关的不同参数联系起来得到的[22],表示如下:
(25)
mg=ahTg,rated
(26)
拟合验证的结果如下。
减速器转动惯量的尺度律模型与实际数据对比如图4所示。
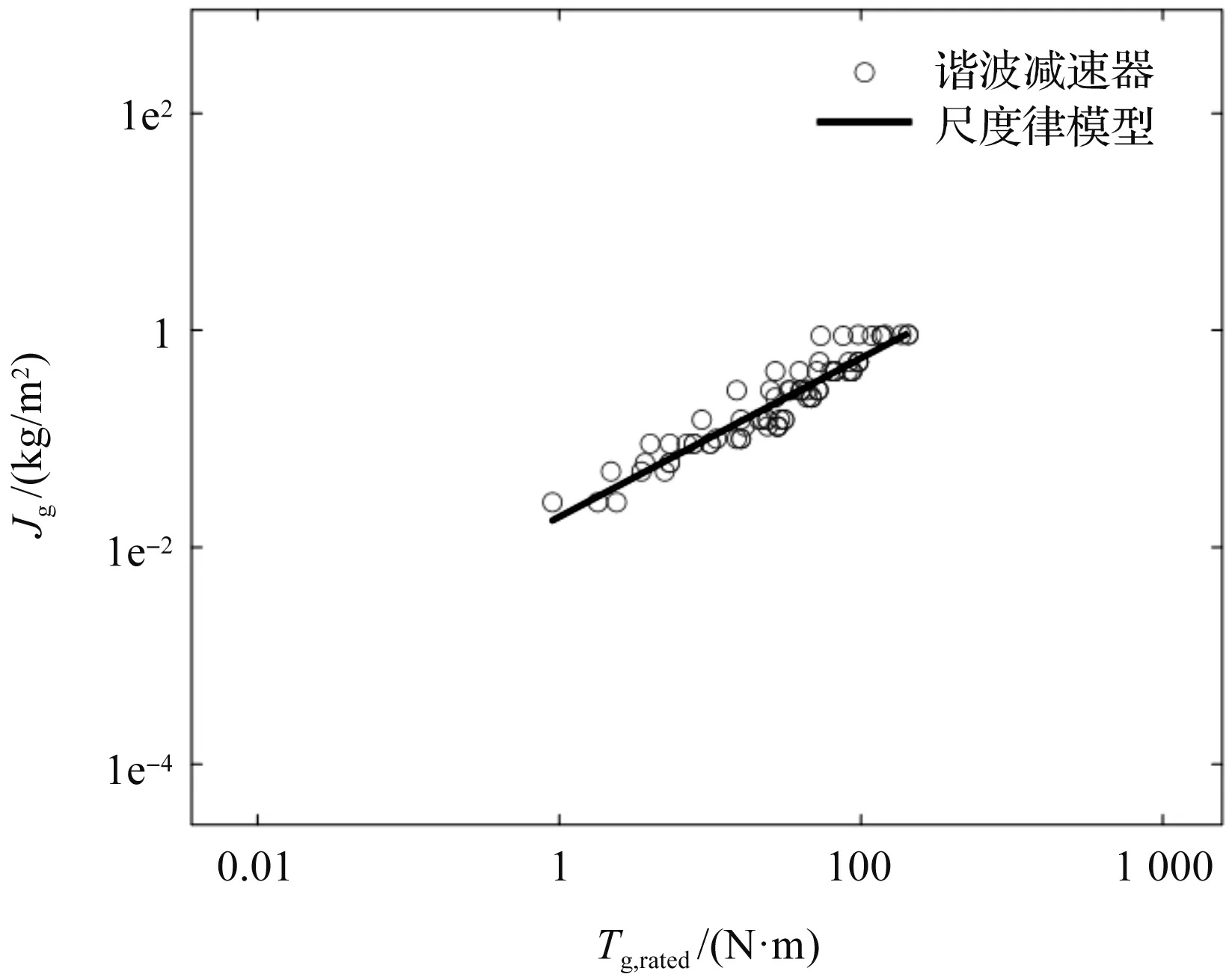
图4 减速器转动惯量的尺度律模型与实际数据对比
减速器重量的尺度律模型和实际数据对比如图5所示。
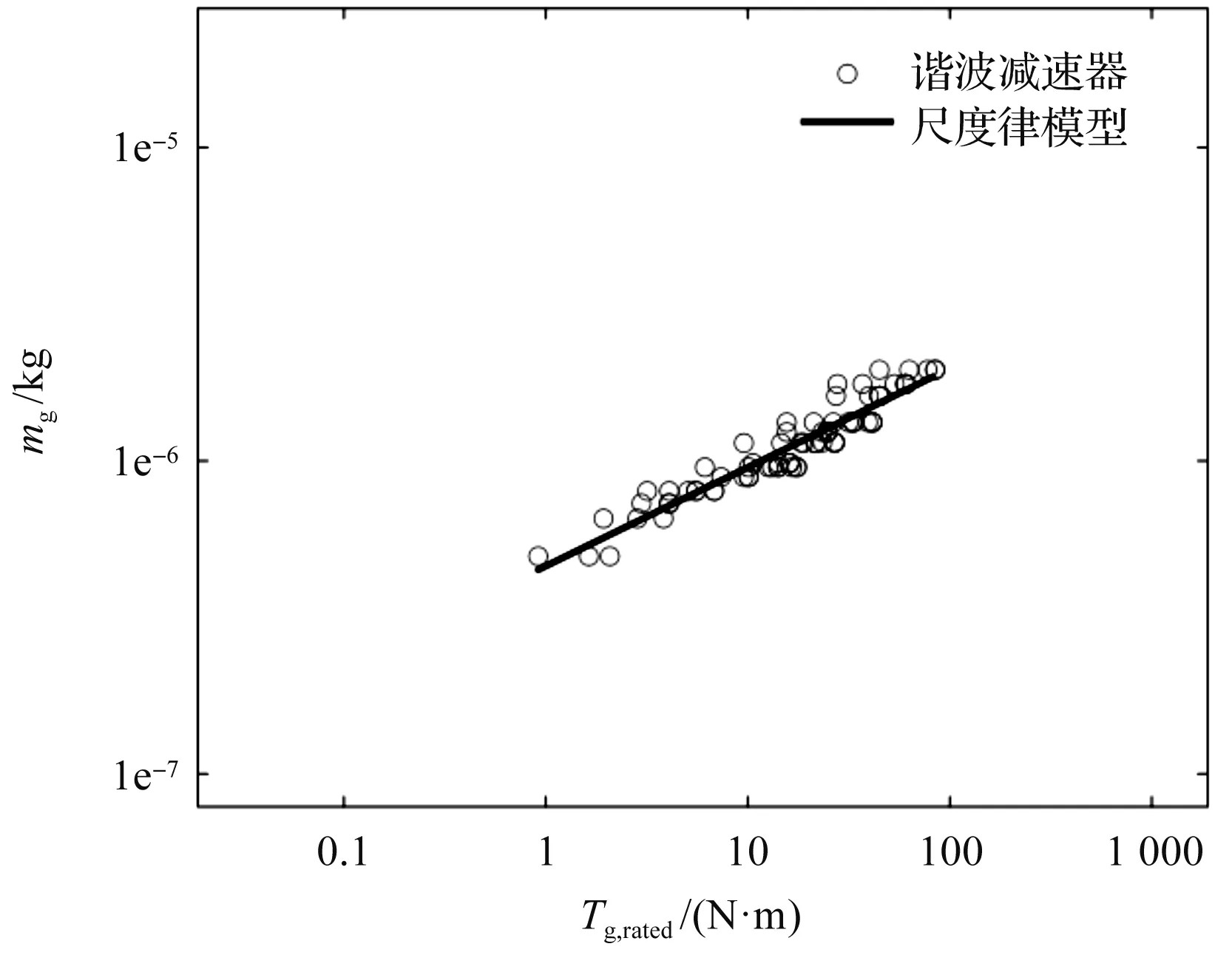
图5 减速器重量的尺度律模型和实际数据对比
2.3.2 减速器减速比尺度律模型
由式(25)可知,减速器的转动惯量可以通过其额定转矩近似表示。文献[5,13]提出,减速器的转动惯量与减速比具有相关性,如果对具有近似相等额定转矩的减速器进行缩放,可以得到减速比与转动惯量的尺度律模型如下:
Jg=arτ-1
(27)
拟合验证结果如图6所示。
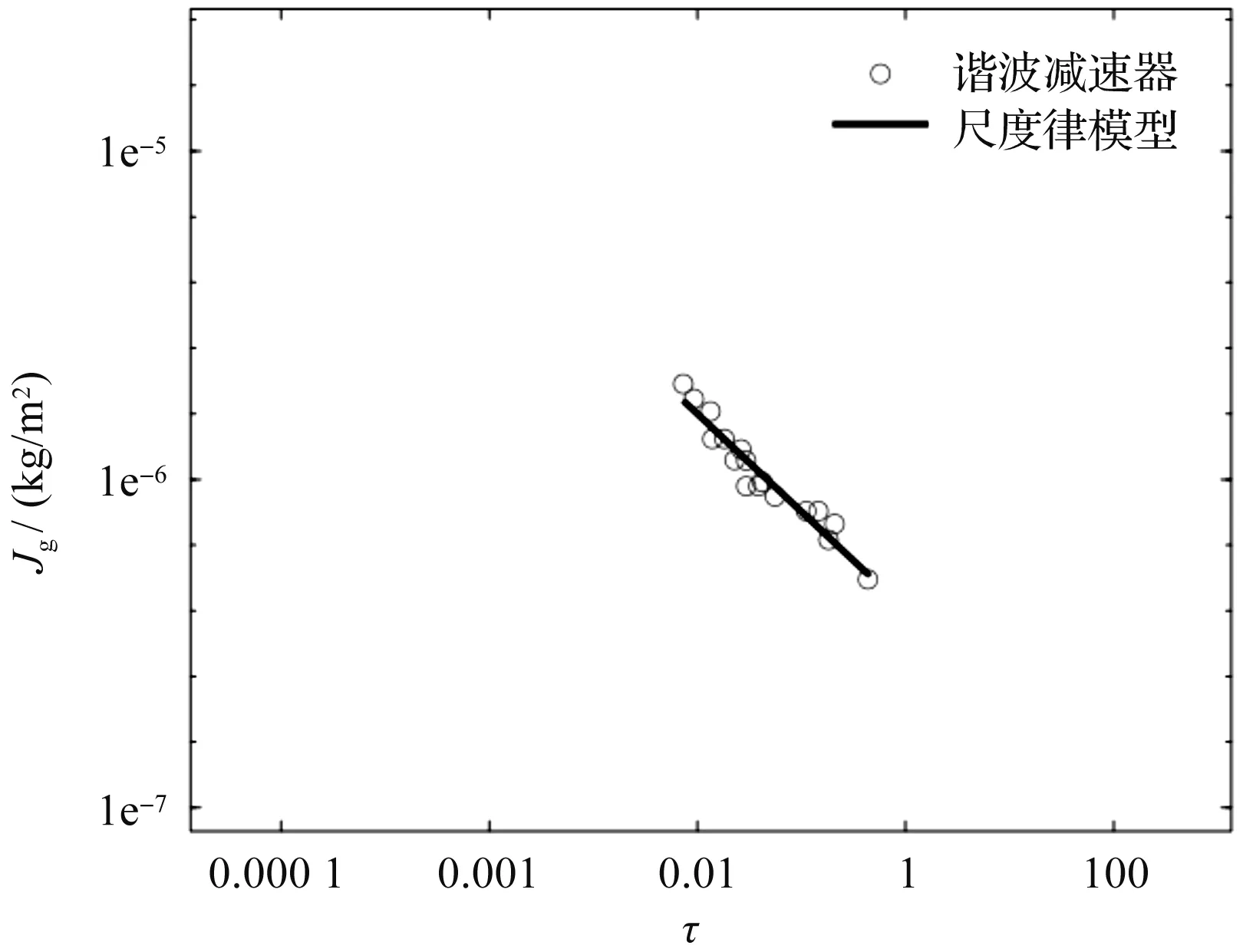
图6 减速比的尺度律模型和实际数据对比
3 系统选型程序
3.1 优化函数简化
根据第2节的尺度律可知,电机的重量为mm∝Tm,rated,减速器的重量为mm∝Tg,rated。因此可以将目标函数改写为:
(28)
而对于电机的额定转矩值,由式(4)可知,其可以由电机转矩的均方根值表示:

(29)
同时,由式(25)、式(27)可知,减速器额定转矩又可以表示为:
(30)
最终,笔者将电机、减速器的尺度律模型代入,得到简化后的目标函数为:

(31)
式中:an、am、ar、ah、ag都已知,其数值均为通过最小二乘法拟合后得到的系数值。
分析式(31)可知,关节传动系统总重量的优化函数在简化后仅与电机的堵转转矩Tstall和减速比τ有关。
3.2 系统选型程序
笔者针对协作机器人关节传动系统的选型提出了一种基于尺度律的方法,以实现关节的轻量化设计为目标,选择电机和减速器的最小重量组合。其步骤如下:
2)根据1.2节和1.3节提出的选择标准,在数据库中选择合适的电机和减速器;
3)对从数据库中得到符合条件的电机和减速器,根据第2节建立的模型,利用最小二乘法进行数据拟合,从而得到尺度律常数;
4)建立电机和减速器组合的最小重量为目标的优化函数,并将尺度律代入,将其简化为仅由电机堵转转矩Tstall和减速比τ组成的函数;
5)将满足驱动负载条件的电机和减速器数据代入优化函数中进行计算,根据计算结果确定电机和减速器的实际选择型号。
4 选型实例和试验
为了证明该方法的有效性,笔者选取了市面上两款不同厂家(A和B)不同型号的协作机器人关节(各关节性能参数数据均来自于厂商官网),在相同的设计指标的条件下,采用基于尺度律的方法进行选型计算,将得到的结果与两款关节的实际重量进行比较。
该方法是用于对协作机器人关节的电机和减速器进行选择,通常电机和减速器的重量占关节总重量的70%左右。
两款关节的厂家及型号如表1所示。
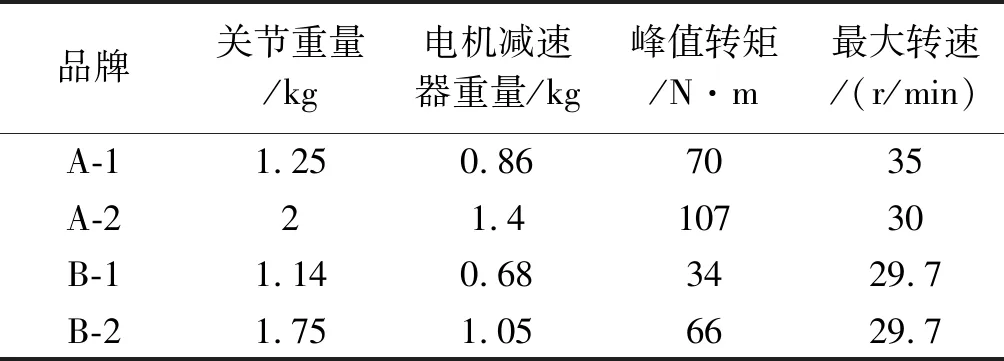
表1 A和B两款关节的型号和性能参数
4.1 选型实例
对于A-1型号的关节,笔者将设计指标代入到优化函数中,得到了A-1性能指标选型结果,如图7所示。
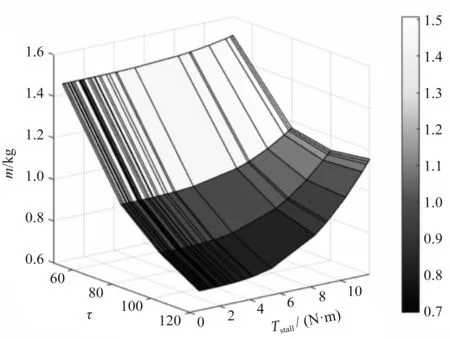
图7 A-1性能指标选型结果
电机和减速器组合最小重量为0.7 kg,减速比τ=120,Tstall=0.6。
因此,笔者选择的电机型号为TBSM85-07B40,重量为0.26 kg;减速器的型号为CSD-32-120,重量为0.51 kg。实际电机和减速器总重量为0.77 kg,实际结果与基于尺度律的模型的预测结果紧密匹配,从而进一步验证了该方法的准确性。
同时,通过优化选型得到的结果与原始的设计重量0.86 kg相比,重量减轻了约7%。
A-2型号的性能指标选型结果如图8所示。
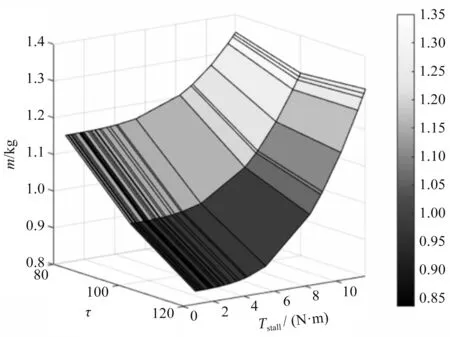
图8 A-2性能指标选型结果
电机和减速器组合最小重量为0.83 kg,减速比τ=120,Tstall=1.13。
笔者实际选择的电机的型号为TBM6051-A,重量为0.55 kg;减速器的型号为CSF-25-120,重量为0.51 kg。实际电机和减速器的总重量为1.06 kg,相较于原来的设计,重量减轻了约30%。
对于B厂家而言,两个型号的关节选型结果如下:
B-1性能指标选型结果如图9所示。
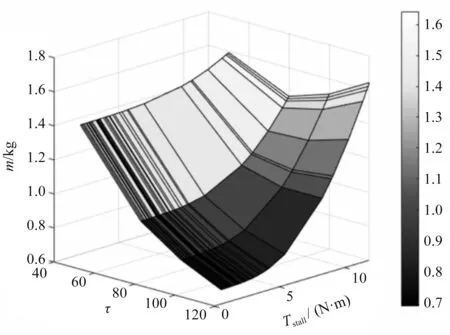
图9 B-1性能指标选型结果
B-2性能指标选型结果如图10所示。
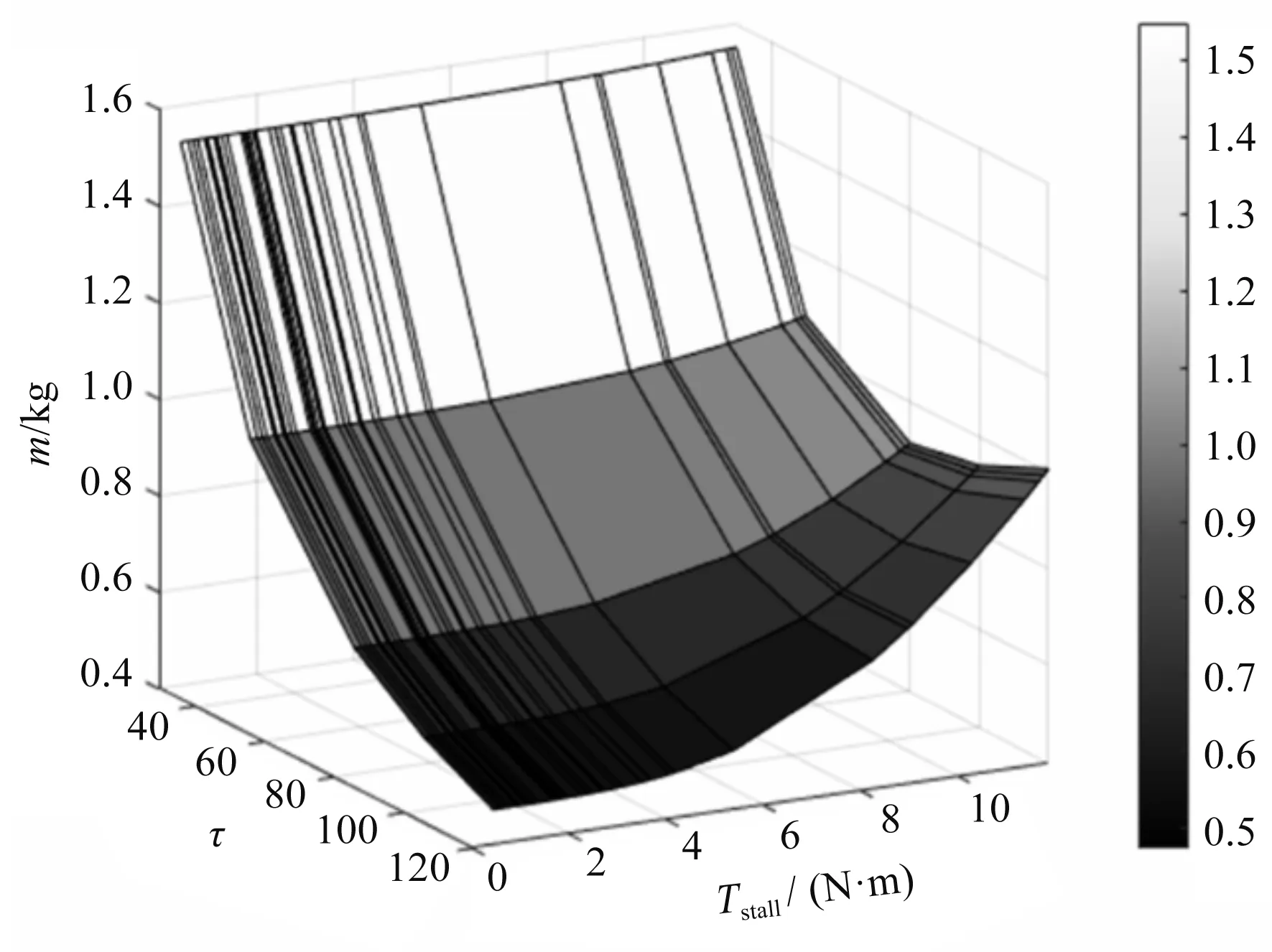
图10 B-2性能指标选型结果
其选型得到的组合重量都比原设计重量减少了约20%~30%,从而验证了该方法的有效性。
4.2 选型试验
为进一步验证该选型方法的有效性,参照科尔摩根(Koll morgen)的RGM17-100协作机器人关节模组,笔者进行了电机和谐波减速器的选型,并完成了关节模组设计。
关节模组性能参数表如表2所示。

表2 关节模组性能参数
根据基于尺度律的优化选型方法,依照表2所示性能参数,笔者进行了关节模组电机和谐波减速器选型.选型结果为:电机型号为河北宇捷TBSM76-15A31,重量为0.5 kg.
关节模组用无框力矩电机实物如图11所示。
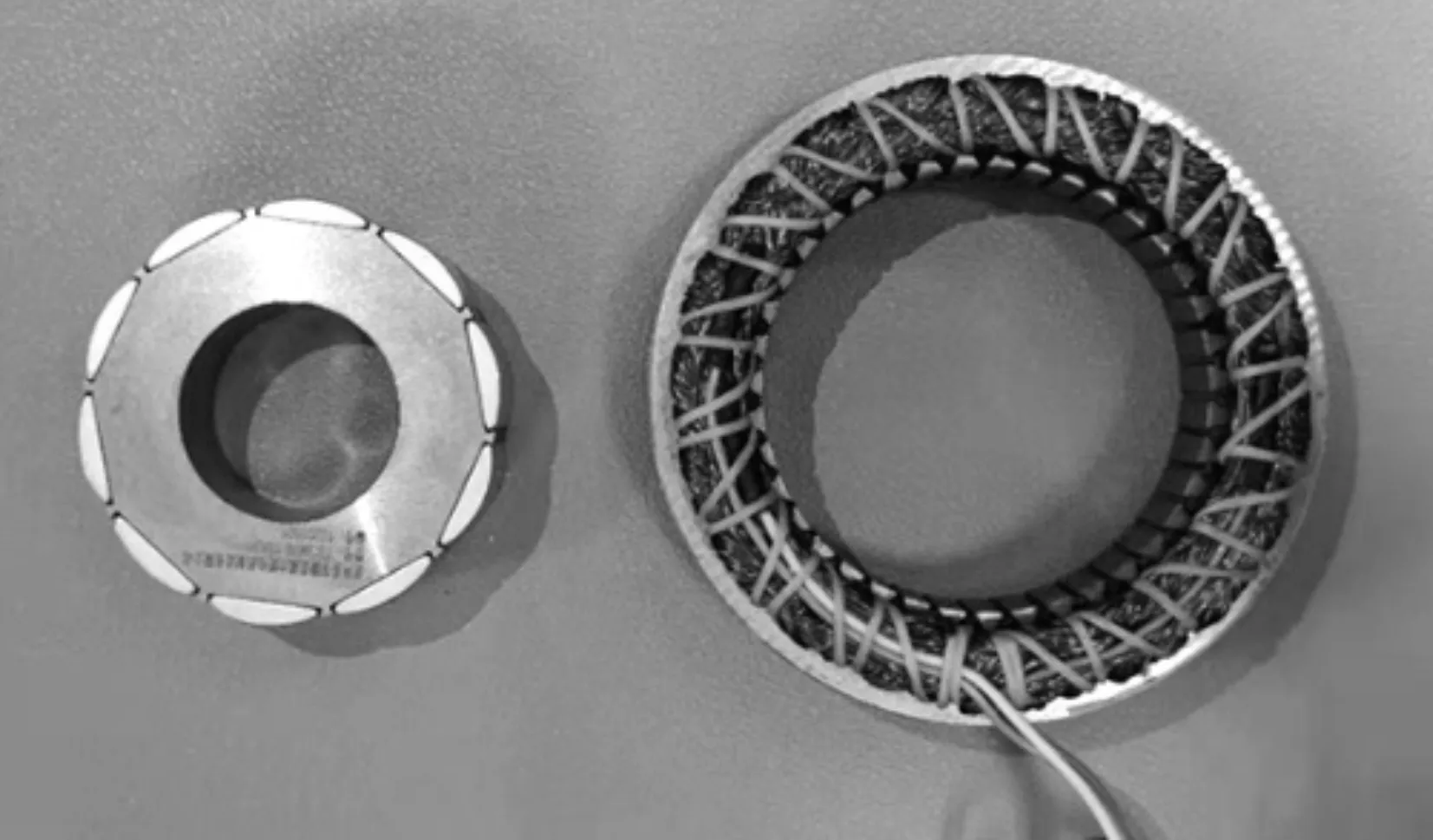
图11 关节模组用无框力矩电机
谐波减速器型号为LHSG-III-17-100,重量为0.8 kg,其实物图如图12所示。

图12 关节模组用谐波减速器
笔者设计的关节模组与科尔摩根RGM17-100电机和减速器重量对比结果,如表3所示。
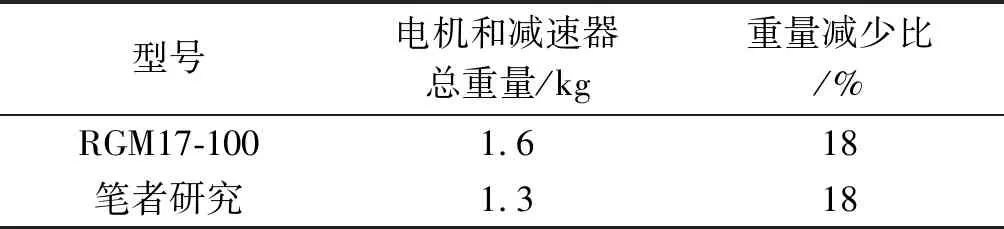
表3 选型结果与RGM17-100对比
由表3可知:相较于原始设计,使用基于尺度律的选型方法得到的电机和减速器总重量减少了约18%,验证了该方法可以有效地减少电机和减速器总重量。
笔者在完成关节模组其他部件的设计选型后,最终完成了关节模组的设计。
关节模组的实物图如图13所示。

图13 关节模组实物图
5 结束语
为了实现协作机器人的轻量化设计目标,笔者提出了一种基于尺度律的协作机器人关节传动系统优化选型方法。具体选型步骤如下:
1)建立协作机器人关节传动系统的动态模型,根据模型确立了电机和减速器的选择条件;2)建立以电机和减速器重量最小化为目标的优化函数,并使用尺度律对优化函数进行简化;3)通过仿真实验和实际试验,对该方法的有效性进行验证。根据选型结果,最终完成了关节的设计任务。
研究结果表明:
1)在仿真实验中,笔者使用该方法对市面上销售的4款关节的性能参数进行了选型,选型得到的电机和减速器的总重量比关节的原始设计减轻了20%,验证了该选型方法的有效性;
2)在实际试验中,笔者参照科尔摩根的RGM17-100关节的性能参数,使用该选型方法得到了电机和减速器的重量,其比原始设计的重量减轻了18%,从而进一步验证了该选型方法的有效性。
在后续的研究工作中,笔者将会使用基于尺度律的选型方法进行不同关节性能参数的实际试验,以进一步提高选型方法的可靠性。
