考虑车辆交互信息的换道风格辨识
2023-09-20马宽邓超
马宽,邓超,2
(1.430065 湖北省 武汉市 武汉科技大学 汽车与交通工程学院;2.430065 湖北省 武汉市 武汉科技大学 智能汽车工程研究院)
0 引言
随着智能交通系统的不断升级,在行车辆之间的信息交互越来越频繁。研究表明,驾驶风格和事故率关联紧密[1]。Murphey 等[2]认为驾驶风格受很多因素影响,其中重要的影响因素为交通环境、心理状态。强制换道是高速公路和城市快速路上常见的危险驾驶行为,导致2019 年我国高速公路事故率为2.78%[3]。因此,研究在强制换道中对驾驶风格的分类和识别具有重要意义,可以为换道的冲突性评价提供理论依据。
国内外学者对驾驶风格辨识进行了相关研究,黑凯先[4]研究了驾驶风格体现驾驶行为的差异性,为驾驶辅助系统的开发提供理论支持;黄晶等[5]通过驾驶模拟器采集了不同驾驶风格驾驶员的换道数据,对其进行换道轨迹规划;冯杰[6]通过驾驶模拟实验对驾驶测试人员进行量化分类,且对驾驶员变道意图进行了识别;李依[7]将车速、加速度、冲击度、横向速度、跟车间距等指标作为驾驶风格识别的特征,将驾驶风格分为3 类;柳祖鹏等[8]比较了k-means 算法和模糊聚类算法对驾驶风格分类的效果,认为模糊聚类更能体现类间的不同特征;张一恒[9]以车辆横纵向加速度的标准差等一系列车辆自身的行驶参数作为分类依据,对驾驶风格进行了聚类;Aljaafreh 等[10]将车辆平均车速、加速度的欧式范数作为特征指标,采用模糊聚类将驾驶风格进行分类;Macadam 等[11]认为跟车时距可以作为衡量驾驶风格的指标;Langari 等[12]用加速度标准差、平均加速度等指标进行驾驶风格分类;Iván 等[13]选用车辆行驶过程中的平均加速度、减速度等特征参数进行驾驶风格分类。
上述研究鲜有从真实实验数据出发研究车辆交互信息对换道风格的影响,因此无法解释新形势下的换道风格特征,且未考虑换道车辆周围车辆对换道风格产生的影响。本研究考虑了多达13 个与周围车辆的交互信息参数,使得对强制换道过程中的车辆进行驾驶风格分类和辨识更加全面。
1 数据预处理
1.1 数据集介绍
数据[14]采集自美国加州旧金山湾区东向的I80大道,数据类型为摄像头记录转换的车辆轨迹,采集区域长度为503 m。如图1 所示,I80 大道单向共有6 个车道,车道1、车道5 分别为最左和最右车道,车道6 为该区域高速公路出入口匝道之间的辅助车道。本文主要研究车道6 上的车辆换道情况。

图1 I-80 数据采集区域示意图Fig.1 Schematic diagram of I-80 data collection area
数据集中车辆种类属性分为1、2、3 三种,属性值为1 代表摩托车,属性值为2 代表小汽车,属性值为3 代表货车,由于属性值为1 和3 的样本数目较少,所以在MATLAB 中将涉及摩托车和货车的数据筛选后进行删除处理,只保留属性值为2 的小汽车数据作为本文研究的对象。当换道事件发生时,也不考虑主体车辆原车道上前后方车辆以及目标车道上前后方车辆属性值为1 或者3 的数据。
研究的数据集中有6 个车道上的车辆行驶数据,为了研究车辆是否从集散车道换道至快速车道,编写程序将6 号车道数换至5 号车道的小型车辆的数据筛选出来,提取出车辆的换道特征变量,共整理出有18 个反映车辆换道过程驾驶风格的因素。研究采用的数据长度单位为 ft,速度单位为 ft/s,加速度单位为 ft/s2。需进行单位换算,长度单位换算成 m,速度单位换算成 m/s,加速度单位换算成 m/s2,之后再进行特征变量的换算。
1.2 驾驶风格参数选择
基于车辆在换道过程中自身的运动参数指标以及与周围在行车辆的交互信息,选取换道时间、换道过程的平均车速、车速标准差、最大纵向速度和换道距离、换道车辆与前后车的速度差、间距、加速度差、目标车辆与目标车道前后车的速度差、间距、加速度差以及目标车道的换道间距等共18个指标作为换道风格聚类的参数,如表1 所示。
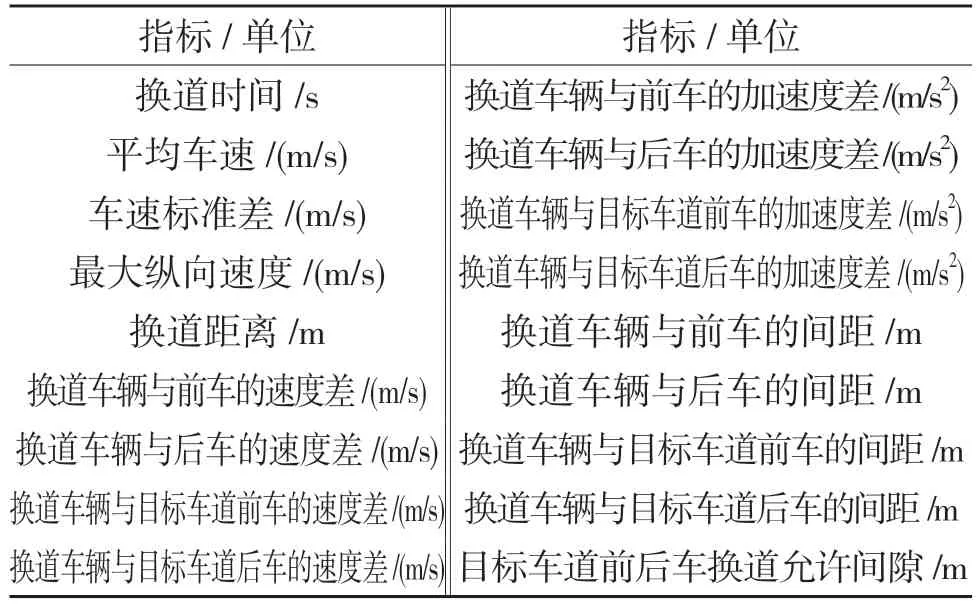
表1 车辆自身特征参数及交互信息指标Tab.1 Vehicle's own characteristic parameters and interactive information indicators
1.3 基于主成分分析的特征降维
共提取出换道过程中106 辆车的数据,选取的18 个指标反映车辆强制换道过程中驾驶风格的特征,为消除数据量纲对聚类效果的影响,首先在SPSS 20.0 平台中将数据归一化处理,得到大小依然为106×18 的矩阵,此时矩阵中的数值皆分布在[0,1]范围内。归一化处理后,为了将多个变量通过线性变换以选出较少个数重要变量,采用主成分分析法将18 个评价指标做特征降维处理,所依据的公式为
式中:N——主成分得分矩阵;P——106×18 的初始矩阵;V——主成分的系数矩阵[15]。
图2 为18 个主成分贡献率柱状图,图3 为18个主成分累计贡献率折线图。图3 中序号为1~10的主成分的累计贡献率达到了86.828%,超过了85%[16],通过变量间的线性关系可计算出10 个主成分的系数矩阵,依据式(1)将归一化后的矩阵与主成分系数矩阵相乘,得到N(矩阵大小为106×10)作为驾驶风格划分的输入指标。
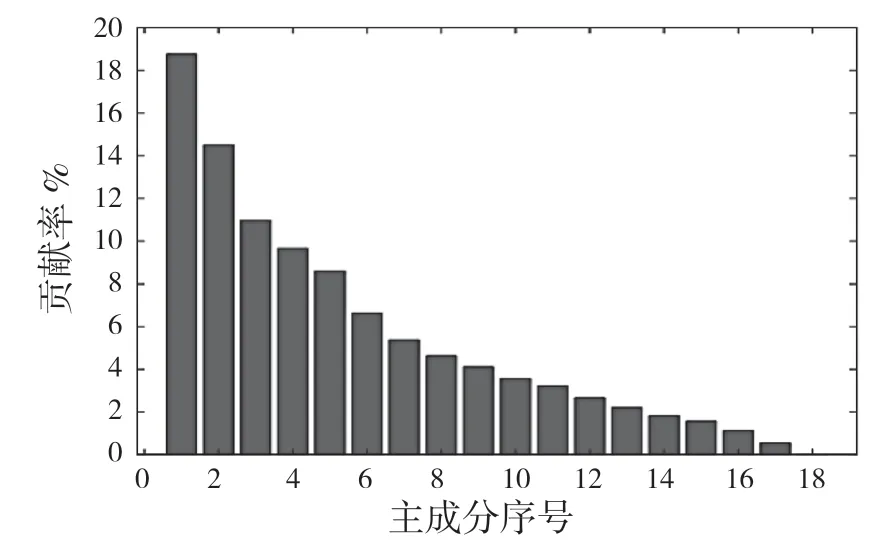
图2 主成分贡献率Fig.2 Principal component contribution rate

图3 主成分累计贡献率Fig.3 Principal component cumulative contribution rate
2 基于k-means 的驾驶风格分类
k-means 算法采用欧式距离作为簇的划分依据,而聚类中心的个数又会影响聚类算法的计算效果。将处理后的数据聚类为2 类、3 类。用最小化平方误差S作为聚类结果的评判依据,S值越小则表示簇内样本相似度越高。
式中:y∈M;M——原始样本集;di——簇Ci的一个均值向量。
由表2 可见,当聚类中心个数为3 时,即将驾驶风格分为激进型、普通型、冷静型时,误差平方和S的值最小,故将驾驶风格分为3 类。

表2 聚类中心划分依据Tab.2 The basis of clustering center division
其中,原始数据共有106 辆车的换道数据,参照李经纬等[17]研究的分类判别法将其分类后,如图4 所示,激进型占比21%,共有22 个样本;普通型占比35%,共有37 个样本;冷静型占比44%,共有47 个样本。

图4 分类样本所占比例图Fig.4 The proportion of classified samples
3 基于SMO 的驾驶风格辨识
SMO 算法[18]的基本思路和步骤:首先大间隔划分超平面对应的模型,如式(4)。
式中:ω,b——模型参数。
由于SMO 算法是对支持向量机(SVM)算法的改进,原始SVM 算法的对偶问题为
然后,求解该问题需固定αi和αj以外的参数,此时,原二次规划问题分解为只有2 个变量的二次规划子问题;对子问题进行解析求解,直到所有变量满足KKT 条件为止,详细求解流程如图5 所示。
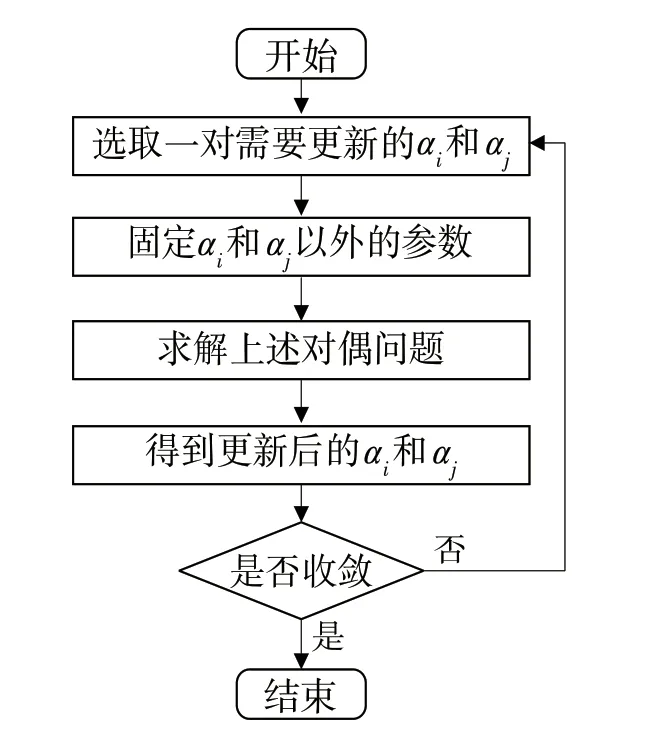
图5 SMO 算法求解流程图Fig.5 SMO algorithm solution flow chart
为简便建模过程,可将实验数据调整为CSV格式,在Weka 平台中选择SMO 算法构建模型,对其进行十折交叉验证。结果表明,SMO 算法对于3 类驾驶风格的识别精确度为87.74%,误判率为12.26%。
4 基于LMT 的驾驶风格辨识
逻辑模型树(LMT)算法[19]是基于树归纳和逻辑回归的一种分类算法,采用Logit Boost 算法在树节点上建立逻辑回归函数,然后使用CART 算法进行剪枝得到最终分类模型[20]。算法求解基本步骤如图6 所示。

图6 LTM 算法求解流程图Fig.6 LTM algorithm solution flow chart
在Weka 仿真实验平台中用LMT 算法构建模型,对其进行十折交叉验证。结果表明,LMT 算法对于3 类驾驶风格的分类精确度为90.57%,误判率为9.43%,识别效果较好。
5 结语
利用k-means 算法将强制换道过程中驾驶风格分为激进型、普通型、冷静型3 类时效果最优,并对比了SMO 和LMT 算法对风格的辨识准确性,辨识精度分别为87.74%、90.57%,说明LMT 算法在行车辆交互信息的情况下能够更高精度地识别出换道风格。
本文只针对强制换道阶段对不同驾驶员进行风格辨识,后续可针对自由换道阶段驾驶员的驾驶风格进行研究,观察执行不同换道行为时驾驶员驾驶风格所表现的特性变化,为不同换道风格驾驶员在换道过程中的风险提供理论支撑。
