基于电流谐波最小的永磁同步电机无差拍预测电流控制
2023-09-19赵继乾张永昌诸晔源王宇彬
赵继乾, 张永昌, 诸晔源, 王宇彬
(华北电力大学 电气与电子工程学院,北京 102206)
0 引 言
永磁同步电机(permanent magnet synchronous motor,PMSM)具有宽调速范围、高功率密度等优点,被广泛应用于众多工业领域[1]。传统的控制策略主要有矢量控制(vector control,VC)和直接转矩控制(direct torque control,DTC)[2]。VC的动态响应较慢且需要一定的参数整定工作。DTC具有结构简单、动态响应快等优点,但其电压矢量的选取依赖于开关表,稳态性能差且开关频率不固定[3]。
模型预测控制(model predictive control,MPC)是一种新兴的永磁同步电机控制策略[4-7]。同DTC相比,MPC选择的电压矢量更为准确有效。同VC相比,MPC具有更快的动态响应。但是传统的MPC在一个控制周期内只应用一个基本电压矢量,这导致开关频率变化、稳态性能相对较差。
为提高MPC的稳态性能,文献[8]介绍了一种可变电压矢量作用时间的方法,其根据价值函数求解最优电压矢量与作用时间的组合,但实现复杂且计算量大。文献[9]通过插入第二个电压矢量调节有效电压矢量的作用时间,基于无差拍控制原理获得最优的占空比,尽管提高了系统的稳态性能,但是无法做到对参考值的无差跟踪。为了实现无差控制,文献[10]将MPC与空间矢量调制(space vector modulation,SVM)相结合,实现了磁链的无差拍控制,提高了系统的稳态性能,但是该方法仅考虑了传统单一矢量序列SVM,并未考虑在高调制比时具有更低电流谐波的母线钳位SVM技术[11]。
文献[12]提出了一种电流纹波最小的混合脉冲宽度调制技术。该方法将SVM的每个60度扇区划分为多个子扇区,每个子扇区都采用使控制周期电流谐波最小的电压矢量序列,最终使每个基波周期的电流总谐波畸变率(total harmonic distortion, THD)最小。文献[13]进一步提出了一种新型脉冲宽度调制技术,同文献[12]相比,该方法有效降低了开关损耗,但电流THD略高。文献[14]基于MPC的思想,采用价值函数在线选择电压矢量序列,有效降低了电流高次谐波和开关损耗。虽然上述方法都降低了电流谐波,但是文献[12]和文献[13]扇区划分复杂,难以在线实现,而且仅在开环v/f控制下进行了验证。此外,不同子扇区之间的切换会产生额外的开关损耗。文献[14]有7种待选电压矢量序列,计算量大且在部分序列切换时会产生额外的开关损耗,另外其价值函数的权重因子需要进行设计。
本文提出一种变序列SVM无差拍预测电流控制(variable-sequence-SVM deadbeat predictive current control,VSSVM-DBPCC)方法。该方法能够使电流准确跟踪参考值,并根据调制比在线选择使电流谐波最小的电压矢量序列,降低了q轴电流脉动和电流谐波含量,计算量小且易于实现。同文献[12-14]中的方法相比,本文主要贡献在3个方面:1)在解析推导出一个基波周期电流谐波表达式的基础上,将调制的待选序列确定为序列0127、012和0121,由于均是电压矢量u0开始和结束,有效避免了额外的开关损耗;2)提出的方法基于一个基波周期来计算电流谐波,仅根据调制比即可在线选择使电流谐波最小的电压矢量序列,计算量小,易于实现;3)将调制策略与无差拍控制相结合,同传统无差拍控制[15]进行了对比。仿真和实验结果表明所提出的方法在不增加开关频率的同时显著降低了电流谐波,尤其是在高调制比下可减小电流谐波畸变率THD达30%以上,非常适合电机高速重载运行。
1 永磁同步电机数学模型
表贴式永磁同步电机在同步dq坐标系下的数学模型可以表示为[16]:
(1)
式中:ψf为转子磁链;Rs为定子电阻;Ls表示交直轴电感;us表示定子电压矢量;is表示定子电流矢量;ωr为转子电角速度;Te为电磁转矩;Np为极对数。
根据式(1),定子电流的微分方程可以表示为
(2)
根据式(2),可以预测不同电压矢量作用下的定子电流。
2 反电动势估计
将式(2)中与转速ωr相关的项统称为反电动势项E。当电机参数不准确时,反电动势E在高速时会产生较大的误差。文献[16]介绍了一种在控制周期不变的条件下E的估计方法。本文采用变序列SVM,需考虑控制周期的变化,以使E的估计方法更具有一般性。
考虑控制周期变化,对式(2)在k-1到k时刻、k-2到k-1时刻、k-3到k-2时刻离散化:
(3)
在同步坐标系下,反电动势项是直流量。将3个时刻的值相加以获得更加平滑的反电动势
(4)
3 传统SVM无差拍预测电流控制
3.1 一拍延迟补偿
实际数字控制系统中,输出电压与指令电压之间会存在一拍延迟。为了消除一拍延迟的影响,采用二阶欧拉法对k时刻的电流进行补偿,k+1时刻的电流预测值为[7]:
(5)

3.2 无差拍电流控制
考虑一拍延迟,对式(2)在k+1到k+2时刻进行离散化[15]
(6)
(7)
将同步坐标系下的电压参考值转到静止坐标系下
(8)
式中θe表示k时刻同步坐标系与静止坐标系的夹角。调制比M和参考电压角度θ定义如下:
(9)
(10)
式中Udc为母线电压。
3.3 传统单一矢量序列SVM

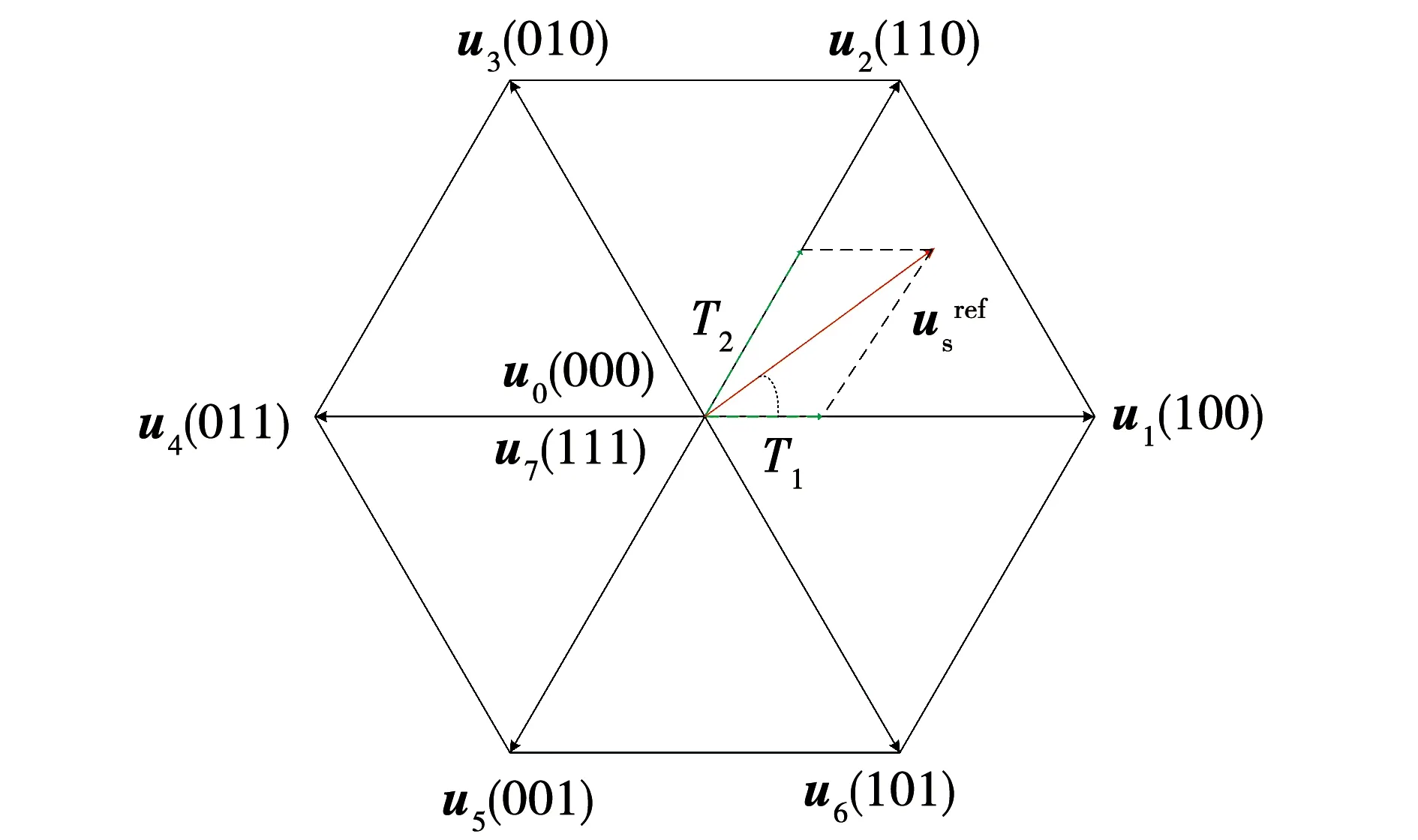
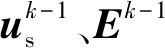
图1 两电平逆变器的电压矢量
(11)
传统SVM无差拍预测电流控制仅采用单一的7段式矢量序列,即u0、u1、u2、u7、u2、u1、u0的顺序来合成参考电压。这导致高速重载等高调制比工况下电流谐波相对较大。为了改善其稳态性能,本文提出了变序列SVM无差拍预测电流控制。
4 变序列SVM无差拍预测电流控制
4.1 单个控制周期内的电流谐波
在第一扇区内,电压矢量u0、u1、u2、u7的作用顺序有多种方式[13],包括序列0127(实际中为0127210对称发波,此处为简写,下同)、012、721、0121、7212、1012、2721。文献[12-14]考虑了多种矢量序列,但并未考虑不同矢量序列切换时的额外开关动作。如序列0127210切换到序列72127时,u0直接切换到u7需要开关3次,这将导致额外的开关损耗。此外,控制算法中求取7种电压矢量序列的电流谐波导致较大的计算负担。考虑到序列012与序列721、序列0121与序列7212、序列1012与序列2721在一个基波周期的电流谐波含量相等,本文仅考虑电压矢量序列0127、012、0121、1012,以避免产生额外的开关频率,同时降低计算复杂度。图2给出了第一扇区中的4种电压矢量序列,其中为了保证开关频率相等,序列012的控制周期被设定为其余序列控制周期的2/3。
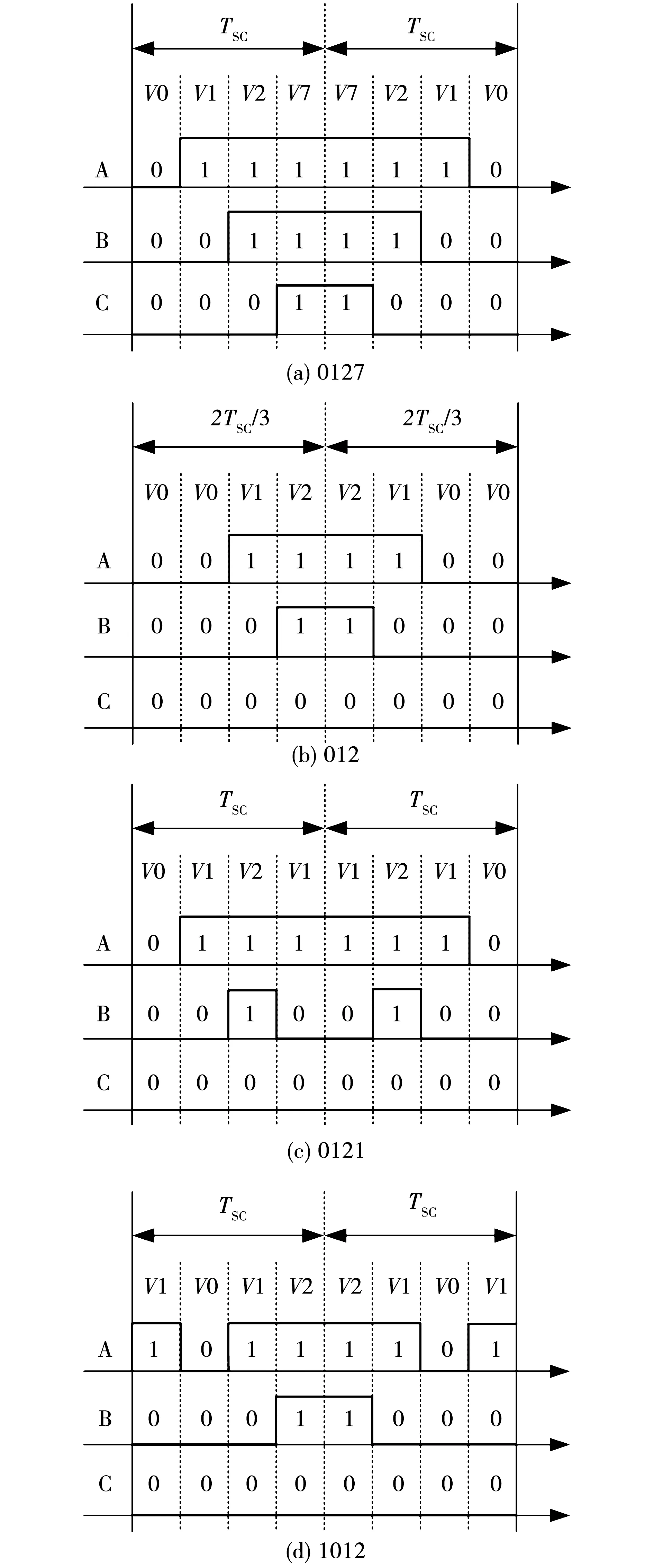
图2 第一扇区的4种电压矢量序列
忽略定子电阻,将永磁电机视为纯感性负载,以TscUdc/Ls为基值,可以求出4种电压矢量序列在一个控制周期的电流谐波有效值的标幺值[12]如下:
(12)
(13)

(14)


(15)
下文中对于电流谐波的计算都是标幺值,为叙述方便,不再强调标幺值。
4.2 基波周期内的电流谐波
从式(12)~式(15)可以看出单个控制周期内的电流谐波有效值的表达式比较复杂,这也是文献[12-14]难以在线实现的原因。本文为此提出了根据基波周期内的电流谐波来选择最优矢量序列的方法。考虑到对称性,对式(12)~式(15)分别在第一扇区积分,即可求得4种电压矢量序列在一个基波周期的电流谐波有效值,即
(16)
将式(12)~式(15)分别代入式(16),化简后可得:
(17)

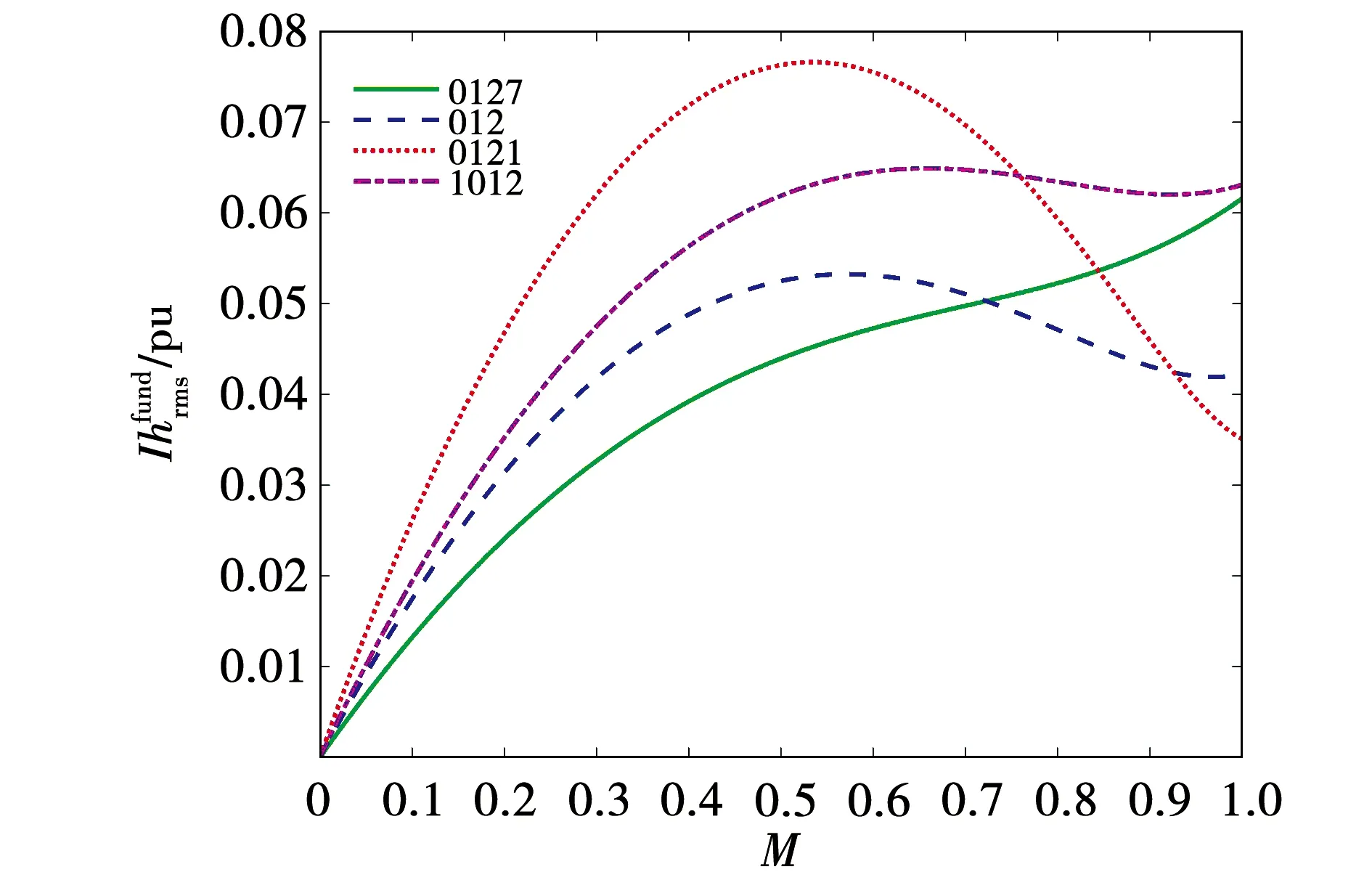
图3 全调制比下4种电压矢量序列的电流谐波有效值
由图3可知,在高调制比时,序列0127的电流谐波并非最优,序列012与序列0121表现出更低的电流谐波含量,而序列1012在全调制下都呈现出比0127更高的电流谐波,所以直接予以剔除。传统无差拍预测电流控制中仅考虑序列0127这一种电压矢量序列,在高调制比时会产生较大的电流谐波。
4.3 基于基波周期电流谐波最小的无差拍控制
为了进一步降低电流谐波,本文综合考虑全调制下不同矢量序列0127、012和0121的电流谐波,提出一种变序列SVM无差拍预测电流控制,系统整体控制框图如图4所示。其基本原理为在线选择使基波周期(而非文献[12-14]中的控制周期)内电流谐波有效值最小的电压矢量序列来合成参考电压矢量,因此具有更小的计算量,更容易与闭环控制相结合。
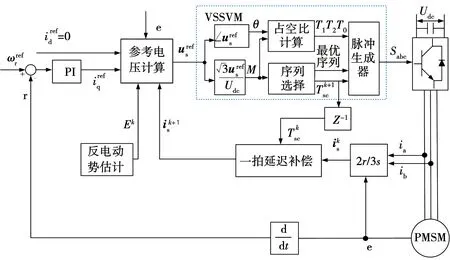
图4 变序列空间矢量调制无差拍预测电流控制框图
序列012的控制周期是另外两种序列控制周期的2/3倍,如图2所示。因此当序列0127与序列012切换或者序列0121与序列012切换时,系统的控制周期将会发生变化。如式(3)和式(5)所示,反电动势估计和一拍延迟补偿需要考虑到控制周期的变化,以实现系统更好的稳态和动态性能。
根据式(7)求得参考电压矢量
(18)
式中
(19)
仿真结果表明,计算参考电压矢量时不考虑控制周期的变化对于系统的性能影响很小。因此,本文在计算参考电压矢量时,忽略序列012引起的控制周期变化。
根据式(17),可以求解出图3中序列0127与序列012的交点处调制比为0.722 6;序列0121与序列012的交点处调制比为0.926 5。结合图3,可得表1。
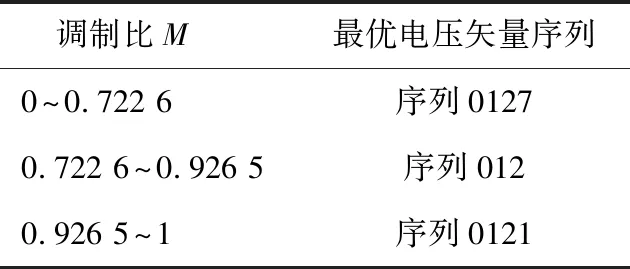
表1 不同调制比下的最优电压矢量序列
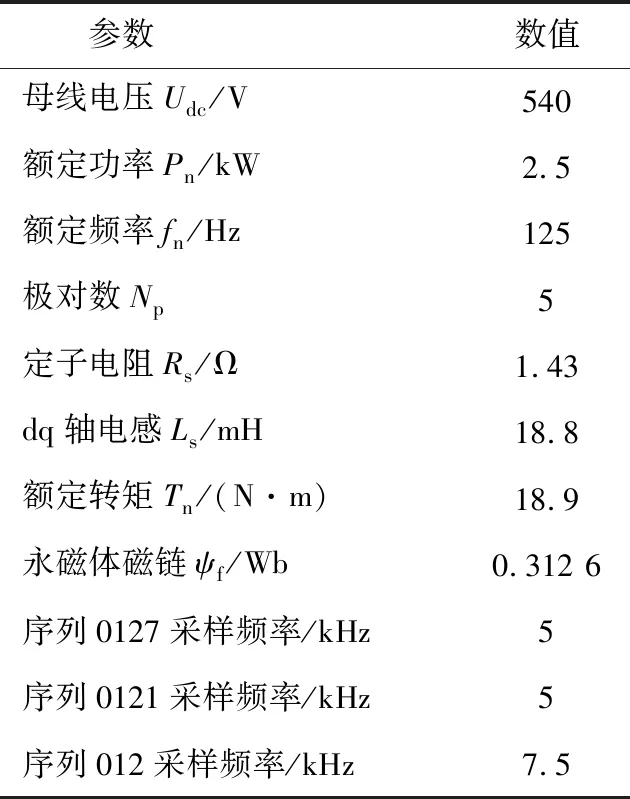
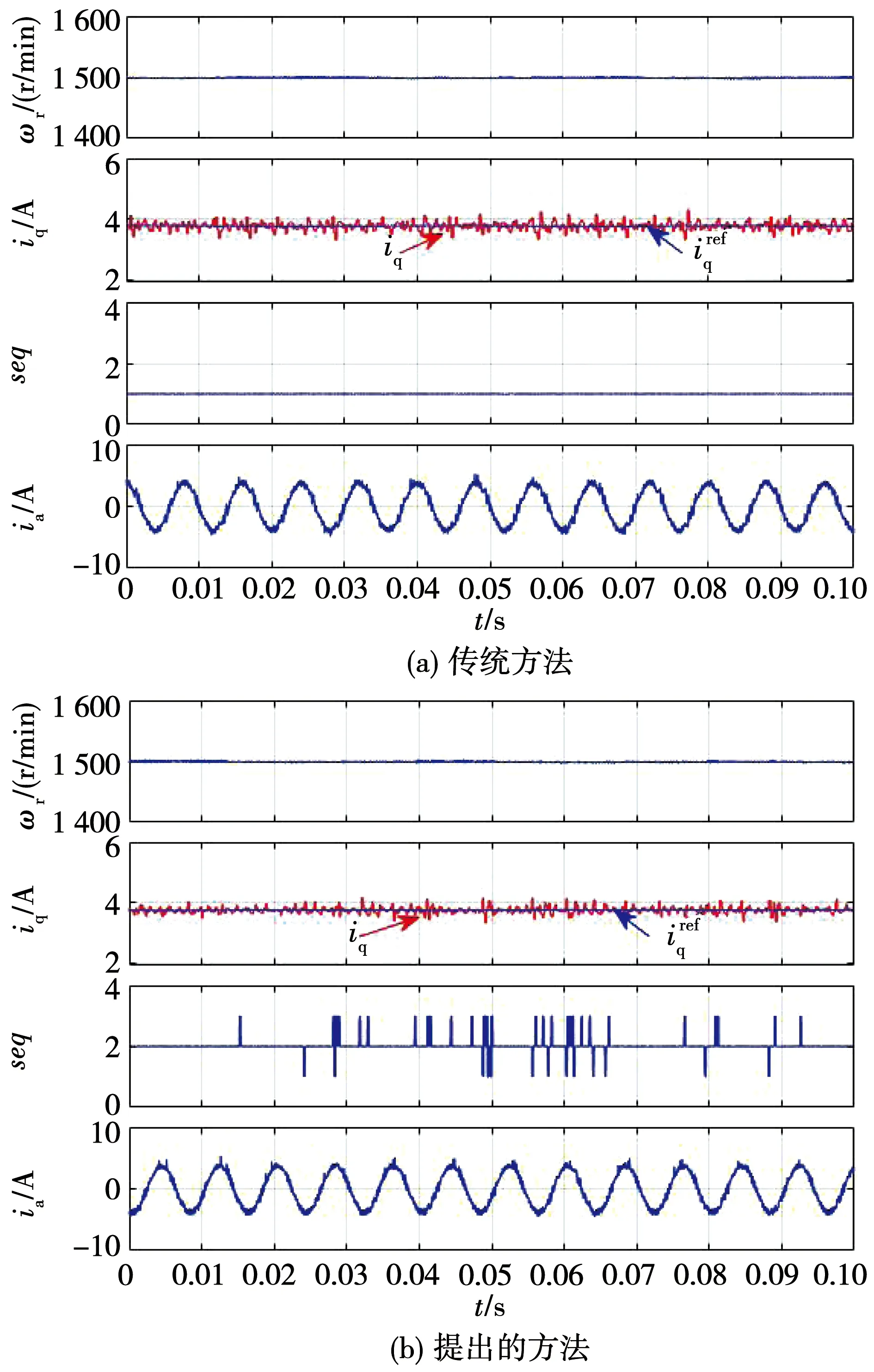
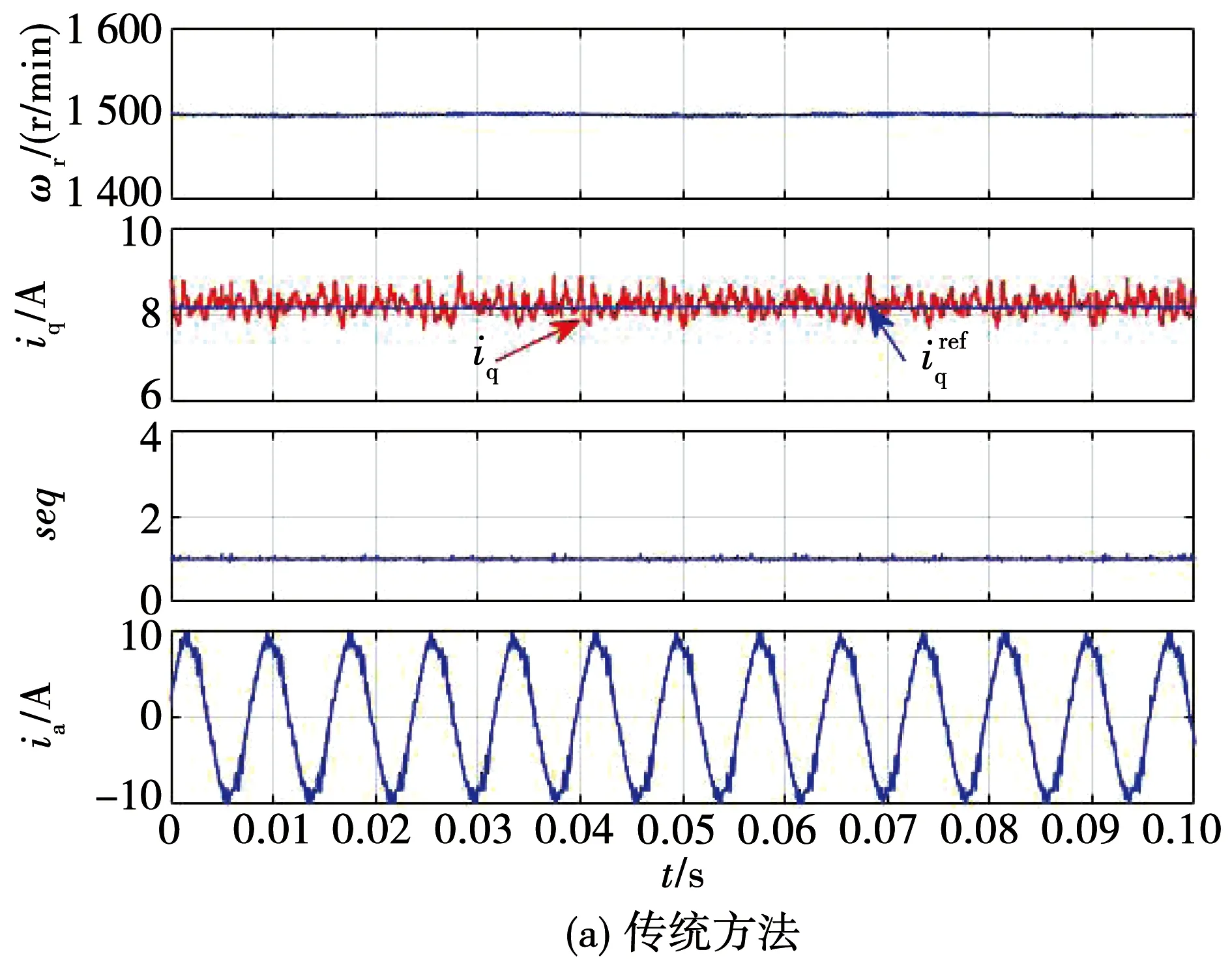
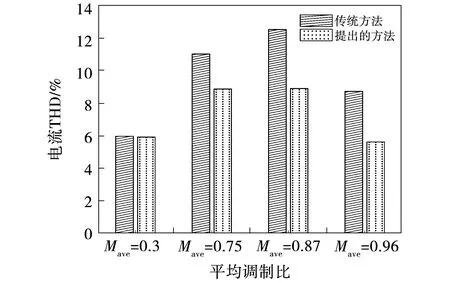
由表1可知,M<0.722 6时,选择序列0127;0.722 6 图5 优化矢量序列选择流程图 在MATLAB/Simulink环境中对提出的方法进行了仿真,以验证变序列SVM无差拍预测电流控制的有效性。仿真参数如表2所示,序列0127、012与0121的采样频率分别为5、7.5、5 kHz。本文采用的双采样双更新PWM方式,因此3种电压矢量序列的开关频率均为2.5 kHz。 表2 仿真和实验参数 仿真中,电机空载启动,在0.1 s加0.5倍的额定负载,在0.5 s加额定负载,仿真结果如图6所示。图6中,从上到下的波形分别为电机转速、q轴电流、电压矢量序列、a相电流、调制比和开关频率。其中seq值为1、2、3时分别表示电压矢量序列0127、012和0121。 与开环控制不同,在图6中调制比不是一个固定的值,而是在均值上下波动。调制比由反馈量和已知参数计算得到的,而反馈量的波动必然会引起调制比的波动。调制比的波动导致在闭环控制中,系统达到稳态时的最优电压序列可能是变化的。例如图6中,0.5 s后的电压序列在序列012与序列0121之间切换。开关频率是统计每0.02 s内的总开关次数然后除以0.02 s得到,因此在0~0.02 s期间,开关频率为0。0.02 s后,开关频率基本维持在2.5 kHz。开关频率产生波动的原因是受限于仿真的最小步长,3种电压矢量序列对应的三相占空比可能小于最小步长,从而导致某些窄脉冲没有精确输出。提出的方法具有良好的稳态和动态性能,且没有增加逆变器的开关频率。限于篇幅,电流谐波将在下文的实验结果中进行量化比较。 在两电平交流调速平台对提出的方法进行了验证,并和传统无差拍预测电流控制方法(下文简称传统方法)进行了对比。电机参数及采样频率见表2。实验平台如图7所示,实验通过磁粉制动器进行加载。数字控制器采用32位浮点DSP TM320F28335,内部变量通过控制板上扩展的4通道DA进行观测。a相电流用电流探头直接测量,其他变量通过DA输出到DL950录波仪上显示。实验结果中的变量顺序与仿真结果一致,其波形是录波仪数据导入MATLAB绘制得到。 由于在闭环控制中调制比M是波动的,为了更加直观的比较传统方法与提出方法的电流THD,我们将一段时间内的调制比取平均值,记为平均调制比Mave。本文实验中的平均调制比是3个基波周期内调制比的平均值。 图8为两种方法在电机600 r/min带10 N·m的波形,此时平均调制比Mave=0.3。两种方法均选择序列0127,且电流波形相差不大。该结果与表1是相吻合的,即:低调制比时,提出的方法选择序列0127,与传统方法的序列相同。 图8 600 r/min带10 N·m负载稳态波形 图9为两种方法在电机1 500 r/min带9 N·m的波形,此时平均调制比Mave=0.87。两种方法选择的电压矢量序列出现差异,传统方法为序列0127,提出的方法主要为序列012。从图中可以看出,提出的方法的q轴电流脉动更小。 图9 1 500 r/min带9 N·m负载稳态波形 图10为两种方法在电机1 500 r/min带额定负载的波形,此时平均调制比Mave=0.96。同传统方法相比,提出的方法选择的电压矢量序列为序列012与0121,并且以0121为主,其q轴电流脉动更小,a相电流更为正弦。图11为两种方法的a相电流THD分析结果。传统方法的电流THD为8.71%,提出方法的电流THD为5.62%。同传统方法相比,提出的方法电流THD降低了35%。 图10 1 500 r/min带额定负载稳态波形 图12为两种方法在不同调制比下的电流THD汇总。经过对比可知,在全调制比下提出的方法比传统方法的电流THD更小;高调制比时,提出的方法对电流THD的降低更为明显。 图12 两种方法在不同调制比下的电流THD对比 图13给出了两种方法电机从+1 500 r/min到-1 500 r/min时的实验波形,可以看出两种方法的正反转切换平稳,q轴电流能够快速准确跟踪参考值。 图13 电机1 500 r/min正反转波形 图14为电机带载启动至1 500 r/min的实验波形,从第3通道seq曲线可以明显看出所提方法在转速升高时(对应调制比增大)选择了012和0121两种矢量序列。综合对比可知,两种方法的动态性能差别不大,均具有良好的动态性能。 图14 电机0到1 500 r/min带载启动 传统无差拍预测电流控制由于仅选择序列0127这一种固定的电压矢量序列,在高调制比下会产生较大的电流谐波。针对这一问题,本文提出了一种变序列空间矢量调制无差拍预测电流控制方法,并对其进行了仿真和实验验证,得到以下结论: 1)将传统无差拍预测电流控制方法中的一种电压矢量序列扩展到3种电压矢量序列,在不增加逆变器开关频率的条件下,实现了在全调制比下降低电流谐波含量。 2)随着调制比的升高,所提出的方法对电流谐波含量的降低愈加明显。高调制比下(M>0.92),可降低电流THD达35%。 3)该方法仅根据调制比在线选择最优电压矢量序列,简单易实现,计算量小,容易与闭环控制相结合。 4)仿真和实验结果表明,本文提出的方法具有良好的稳态和动态性能,验证了方法的有效性和实用性。
5 仿真与实验结果
5.1 仿真结果
5.2 实验结果



6 结 论
