基于DoDAF的无人机集群应急响应体系结构设计
2023-09-15陈璐吴虎胜
陈璐 吴虎胜

摘要: 运用无人机集群处置突发事件是一种高效的处置模式, 为建立由地面到空中、 由平面到立体的综合治安防控体系, 使用美国国防部体系结构框架DoDAF(Department of Defense Architecture Framework)构建无人机集群应急响应体系模型, 从任务需求出发建立体系的系统结构、 任务活动、 组织关系、 能力指标等模型, 使用层次分析法AHP(Analytical Hierarchy Process)和模糊综合评判法, 定性定量相结合对能力需求进行分析, 为无人机集群处置突发事件作战的应用需求及论证提供支撑和研究视角。
关键词: 无人机集群; DoDAF; 层次分析法; 模糊综合评判法; 应急响应体系; 武器装备
中图分类号: TJ760; V279 文章编号: 1673-5048(2023)04-0078-07
文献标识码: A DOI: 10.12132/ISSN.1673-5048.2022.0228
0引言
近年来, 随着大国博弈的持续升温, 加之疫情影响导致经济放缓, 社会动荡因素增多, 局部冲突日益频繁、 城市爆发突发情况风险显著增加, 如何高效运用武器装备, 构建发展快速响应任务处置的装备需求体系, 提高处置效能, 已成为不可回避的重大课题。 集群(Swarm)是指由实体(Entity)组成的拥有共同目标的群组(Group), 自组织(Self-Organizing)是集群在获取或者尝试获取该目标时产生的协调行为[1]。 无人机执行3D即枯燥(Dull)、 恶劣(Dirty)、 危险(Dangerous)任务时, 相比有人机具有更大的优势。 受自然界蜂鸟群、 狼群等启发, 组成无人机集群, 形成具有无中心、 共识自主性、 自组织性等特点的群体智能机制, 突出数量、 智能、 应变、 低成本等方面的优势, 将其应用在突发情况应急响应体系中, 无论是在理论框架还是应用需求都是十分契合的。
美国国防部体系结构框架(DoDAF)是一种规范化描述体系结构的方法, 适用于体系结构的构建与分析。 DoDAF作为武器装备需求描述的标准已经得到较为广泛的认可[2]。 但作为一个公共标准, 并没有针对装备需求描述提供具体的开发指导, 其在作战体系中的应用也较为稀少。 目前, 国内针对无人机集群作战体系的研究还处于起步阶段, 文献[3]通过DoDAF 视图对反导作战进行建模与仿真设计。 文献[4-5]使用DoDAF对有人机/无人机协同作战系统进行结构设计。 文献[6]运用DoDAF方法对空基反导装备体系结构建模。 虽然建立了一些作战体系模型, 但缺少对其性能合理性和可行性的分析。
目前国内对无人机集群处置突发事件体系建设的相关研究较少, 本文以DoDAF为基础, 从全景视点、 作战视点、 系统视点出发, 构建一种以处置突发情况为中心任务的无人机集群应急响应体系结构模型, 并运用AHP和模糊综合评判法对相关能力指标进行分析评估, 验证其指标构建的合理性、 优劣性。 以其中的任务处置节点为例进行评判, 验证了其有效性。
1无人机集群应急响应体系框架构建
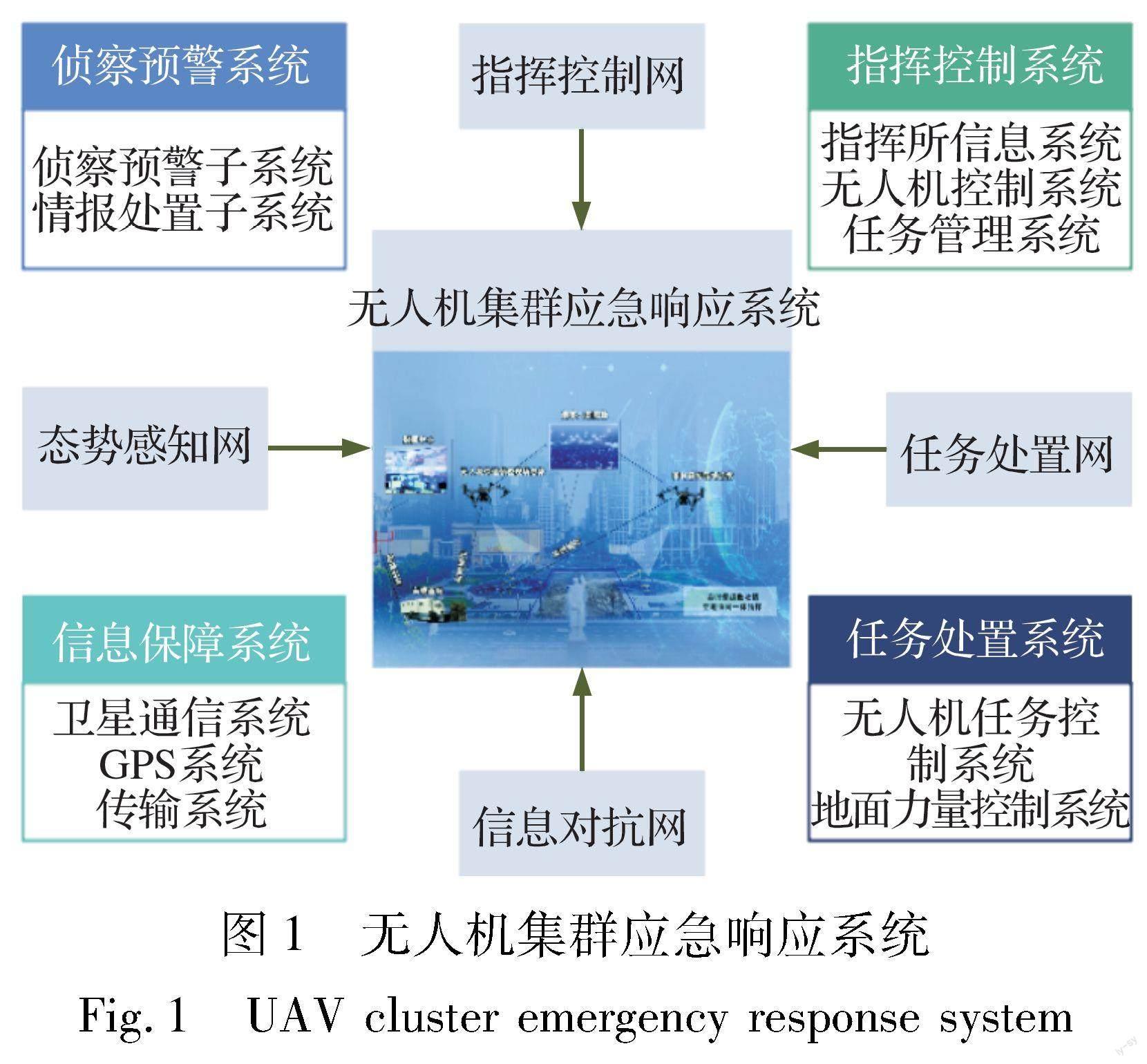
通过打造无人机互联互通, 作战行动智能协同的应急响应装备体系, 实现“因势利导、 因地制宜、 因人而异”的作战理念, 尽可能实现以最小的代价取得最大的处置战果。 以无人机集群形成空中主导力量, 与地面力量相结合, 充分利用无人机模块化、 自动化、 机动性、 集群协作性等特点, 补齐在处置突发事件的短板弱项, 实现无人机侦察、 威慑、 宣传、 非致命驱散、 抓捕于一体的综合能力。 该系统主要分为侦察预警系统、 指挥控制系统、 任务处置系统、 信息保障系统4个部分。 侦察预警系统确保查明事件的起因、 背景、 规模, 了解掌握现场相关情况、 社会动态、 事件发展趋势以及危害程度, 为行动提供准确情报。 指挥控制系统确保任务中实现高度集中统一指挥, 保证指挥高效。 任务处置系统则依法采取相应的措施手段, 最低限度用武, 迅速稳妥平息事态。 信息保障系统可不间断地保障指挥、 协同和信息传递。 具体如图1所示。
2基于DoDAF的体系结构建模方法
通过以特定作战任务为背景, 根据其作战使命分析作战任务需求, 进而得到作战活能与能力映射关系, 从而建立无人机协同处置突发事件的体系结构视图产品和可执行模型。 其流程为: 首先通过AV视图对其进行体系描述。 建立AV-1信息模型, 反映其作战任务的整体信息, 为结构模型提供整体约束, 然后通过OV视图对其进行分解建模, 建立OV-1概念图, 更形象直观地描述其作战概念, 通过OV-4描述作战节点、 人员、 部门之间的组织结构和指挥关系; 通过OV-5b, OV-6c描述体系的作战活动流程、 任务状态转换。 建立SV视图对系统进行分解, 通过SV-4a, 描述其细化的系统功能, 最后得出作战能力指标。
为实现无人机协同处置突发事件体系构建相关模型, 满足体系需求, 具体建模采用的产品视图如图2所示。
(1) 依次建立AV-1, OV-1, 明確体系构建描述。
(2) 建立OV-4, 明确体系组织关系。
(3) 建立OV-5b, OV-6c, 跟踪其作战活动和状态转换及其资源交换。
(4) 建立SV-4a, 对其作战功能进行分解细化。
(5) 建立作战能力指标, 通过系统功能对其作战能力进行映射, 得到相应指标。
3无人机集群应急响应体系结构模型
3.1基于全景视角的结构模型
建立AV-1概要信息模型, 是对整个结构框架的总体描述及其信息的总和[7]。 通过具体描述, 清晰地展现决策过程。 AV-1模型描述无人机集群应急响应体系结构的任务背景、 作战目的、 作战范围、 约束条件、 作用效果等, 为后续设计开发提供概念支撑。 AV-1全景视图如图3所示。
3.2基于作战视图的结构建模
根据相关部門作战任务需求, 建立高层作战概念图OV-1描述使命任务, 掌握作战系统的各个作战单元之间的信息交互情况, 对作战使命有更细化具体的了解, 形成作战节点, 如图4所示。
建立组织关系图OV-4描述作战节点, 组织之间的指挥结构关系。 用来阐明其中各个系统与分系统, 组织与分组织之间存在的各种关系。 无人机集群应急响应体系组织主要由信息保障组织、 侦察预警组织、 任务处置组织、 指挥控制组织构成, 如图5所示。
基于无人机集群应急响应体系的任务需求, 建立OV-5b作战活动模型, 通过描述活动间的输入输出关系流, 进一步对作战活动流程进行明确和规范。 如图6所示, 以实行驱散活动为背景, 创建活动模型子图, 指挥中心根据侦察无人机群组反馈的图像信息智能决策发布任务给驱散任务无人机群组, 而后规划航线选取目标人群, 选取驱散策略和具体任务群组, 指挥控制群组实施驱散活动。
建立OV-6c事件跟踪描述, 充分描述其作战活动及任务的动态行为, 明确了整个任务流程的时序关系和行为关系。 如图7所示, 通过对处置突发事件任务中作战活动节点的处置顺序来分解动态行为。 其节点包括指挥控制、 现场态势侦察、 政策宣传疏导、 实施任务驱散、 协同协助抓捕、 巡逻维持稳定。
3.3基于系统视图的结构建模
在AV视图和OV视图基础上, 建立SV-4a系统功能分解模型。 对任务功能进行分解, 分类细化得到子任务功能。 如图8所示, 采用层次图将整个应急响应系统功能分为指挥控制功能、 侦察预警功能、 任务处置功能、 任务评估功能, 并细化分解出子功能, 对各功能进行连接得到数据流。
3.4构建作战能力指标
利用DoDAF的三个视图对无人机集群应急响应体系进行可视化分析, 将抽象的作战需求具体化、 流程化[8]。 自顶向下对其进行分解, 得到作战活动、 作战功能、 作战节点等一系列映射关系。 通过对无人机集群应急响应体系从全局到局部分析, 映射出不同阶段活动流程及各分系统相关数据流, 分析出需求的作战能力, 找到其对应转换关系, 通过对得出的作战活动进行能力提取, 转化为规范化描述的能力需求。
其能力需求映射如下:
(1) 指挥: 指挥实时畅通, 数据信息可靠准确, 确保行动高效统一。
(2) 侦察: 综合运用多种侦察手段, 对现场实施多维立体高效的侦察, 实现指挥可视化、 感知实时化。
(3) 宣传: 利用无人机携带扩音模块, 持续对聚众人群进行喊话, 达到安抚疏导作用。
(4) 驱散: 利用无人机搭载不同效能非杀伤性武器装备载荷, 夺控并举, 对闹事人群进行驱散, 迅速控制事态。
(5) 打击: 根据事态恶化情况依法对闹事分子进行精准打击, 发挥突击打击优势。
(6) 抓捕: 无人机自动追踪, 标记闹事分子, 引导协同地面力量进行抓捕。
(7) 巡逻: 利用无人机实现全时监控, 监测异常目标, 防止事件反弹, 如表1所示。
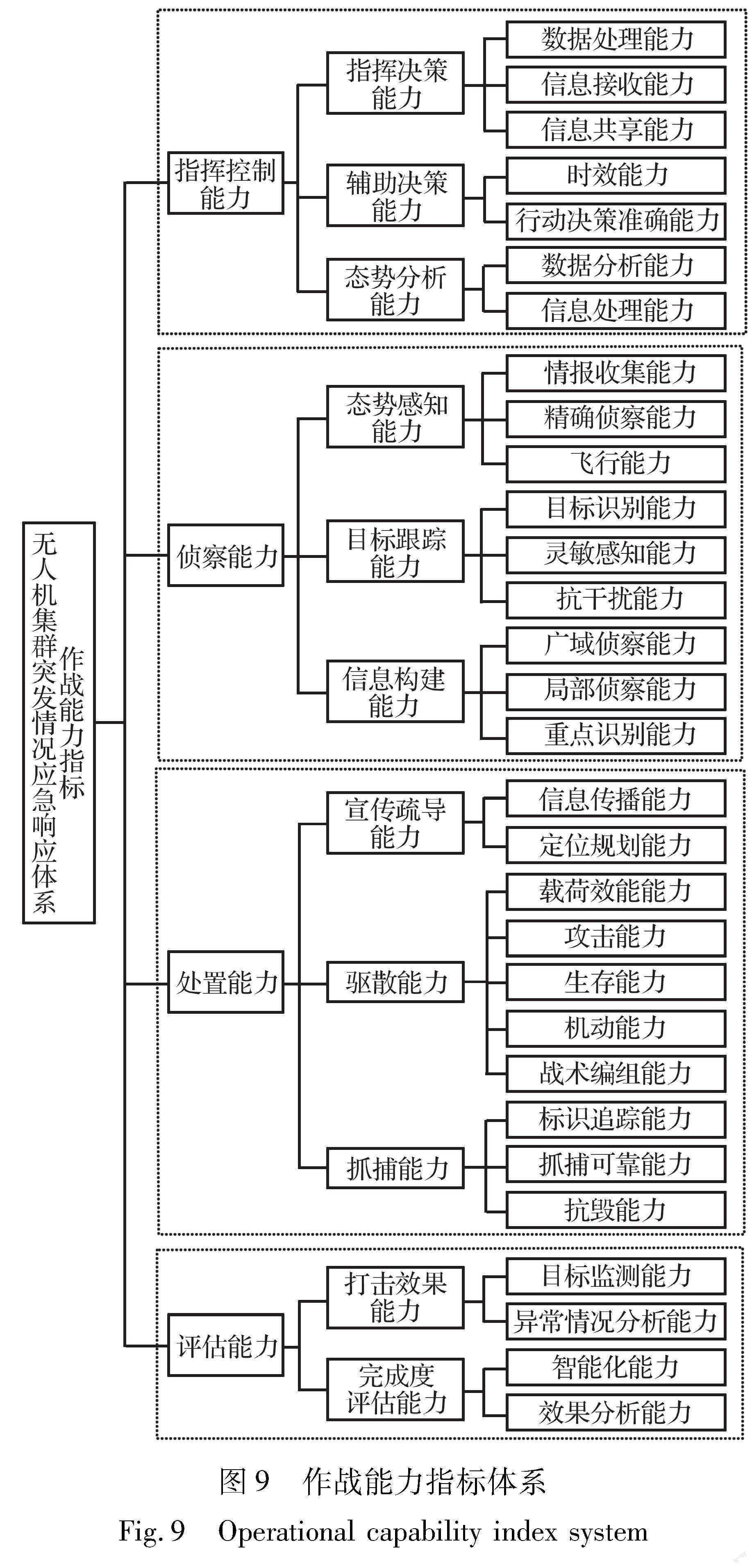
为了能够将作战需求与整个系统功能进行更加紧密的联系[9], 进一步结合SV-4a系统功能分解模型对其作战能力需求再次进行细化分类。 根据指挥控制、 侦察预警、 任务处置、 任务评估四大功能对能力需求进行映射, 可构建出整个体系的作战能力指标。 通过映射更加直观地描述了整个系统的能力分层对应关系, 得出所需的具体能力[10], 可分为4个一级能力, 11个二级能力, 30个三级能力, 如图9所示。
4构建无人机集群应急响应体系能力需求分析模型
通过DoDAF建模得到无人机集群应急响应体系的作战能力指标。 为了全面评判其作战需求, 建立能力评判模型, 通过层次分析法(AHP)对指标进行权重分析, 采用模糊综合评判法进行评判, 不断调整优化性能指标, 可达到提升体系能力水平、 弥补体系能力短板、 缩小体系能力差距的效果; 从联合作战任务角度出发, 可达到提高完成作战任务程度、 降低作战损失和消耗的效果。
4.1评判指标结构建模
层次分析法作为目前非常成熟的权重计算法, 应用非常广泛[11]。 对n个因素A1, A2, A3, …, An, 通过九级标度法建立两两比较矩阵, 按照1~9的标度进行评价, 如表2所示。
通过打分, 得出n×n阶的判断矩阵A=(aij);
4.2模糊综合评判法
因无人机集群作战效能不是依靠简单的单项指标加和, 其指标需要考虑多个因素所产生的影响[12], 其复杂的涌现性依靠传统的评估手段是无法满足需求的, 所以要利用模糊综合评判法在定性分析各因素的基础上, 定量地对其指标体系进行科学有效的综合分析, 构成合理的装备体系, 为决策优化提供支撑[13]。
首先建立各指标评语集, 划分4个等级(优, 良, 一般, 差), 对应分数集合为{100, 80, 60, 40}。 其次建立因素集, U={u1, u2, …, ui}, i=1, 2, …, n, 建立评判集V={v1, v2, …, vj}, j=1, 2, …, n。
进行单因素评判Ri, 确定权重及隶属度向量, 得到评判模糊矩阵R
为均衡各个因素的影响程度, 使用加权平均型计算
4.3实例分析
以无人机集群的任务处置能力为例进行评判。
4.3.1模型建立
为了实现理论与实践的融通, 通过不断地迭代演化建立了对应的作战能力指标[14]。 根据得出的作战能力指标, 建立无人机集群应急响应体系的任务处置系统评判模型。 以任务处置能力指标为决策目标层, 由于其复杂性和特殊性, 从任务节点出发, 建立两层准则层。 第一层指标分为宣传疏导能力、 驱散能力、 抓捕能力。
第二层指标细化如下:
(1)宣传疏导能力指标
包括信息传播能力(实现喊话驱散、 警告、 谈判、 通知的能力, 确保传播度)和定位规划能力(精准定位、 识别目标, 确保行动准确度)。
(2)驱散能力指标
包括载荷效能能力、 攻击能力(携带载荷的精确打击能力, 对目标实施有效的打击)、 生存能力(无人机集群的自愈能力, 确保现场生存, 不影响任务进行)、 机动能力(快速进行任务部署, 提高现场处置能力)、 战术编组能力(无人机集群相互配合, 合理分配攻防资源, 提高战术效能能力)。
(3)抓捕能力指标
包括标识追踪能力(对异常目标进行标识, 进行精确跟踪并取证的能力)、 抓捕可靠能力(利用无人机集群发射捕捉网、 黏胶弹等对其实施精确打击抓捕能力)、 抗毁能力(规避敌方的打击, 确保行动安全)。 系统评判模型如图10所示。
4.3.2AHP计算权重
使用层次分析法, 根据实际任务情况, 结合专家打分法, 对无人机集群的任务处置系统指标的相对重要性进行比较, 对其性能进行定量分析[15], 如表3~6所示。
体系U的权重W由计算可得。 λmax=3.029 1, CI= 0.014 5, IR=0.52, CR=0.027 9。 从结果可知CR<0.1, 其一致性可接受, 权重W =[0.081 1, 0.576 9, 0.342 0]T。
体系U1的权重W 1由计算可得。 λmax=2, CR=0。 从结果可知CR<0.1, 其一致性可接受, 权重W1=[0.750 0, 0.250 0]T。
体系U2的权重W 2由计算可得。 λmax=5.246 4, CI= 0.061 6, IR=1.12, CR= 0.055 0。 从结果可知CR<0.1, 其一致性可接受, 权重W2=[0.038 9, 0.502 1, 0.256 0, 0.125 9, 0.077 1]T。
体系U3的权重W 3由计算可得。 λmax=3.009 2, CI= 0.004 6, IR=0.52, CR=0.008 8。 从结果可知CR<0.1, 其一致性可接受, 权重W3=[0.192 9, 0.701 0, 0.106 1]T。
4.3.3模糊综合评判
将计算出体系的作战能力指标权重分为两个层级, 第一层有3个指标, 第二层有10个指标, 由专家对其打分, 如表7所示。
计算U1模糊评价Bi(i=1, 2, 3):
归一化后, B1=[0.30.3250.20.175],B2=[0.361 81 0.375 81 0.149 79 0.112 59]; B3=[0.329 90.20.289 390.180 71]。
由此可得, 无人机集群应急响应体系作战任务处置系统在宣传疏导能力、 驱散能力、 抓捕能力3项指标的一级判断矩阵为B=[B1B2B3], 经加权法可得
A=WB=[0.345 90.311 60.201 60.140 9]。
对于无人机集群应急响应体系任务处置系统的能力构建, 35%的专家认为优, 31%的专家认为良, 20%的专家认为一般, 14%的专家认为差。
分数集为C=[100, 80, 60, 40]T, 将其结果与评分集进行加权得分为
S=WBCT=ACT=[0.345 9, 0.311 6, 0.2016, 0.140 9][100, 80, 60, 40]T=77.247 6。
同理可得: S1=B1·CT= 75.000; S2=B2·CT=79.736 8; S3=B3·CT=73.581 8。
由此可得, 無人机集群应急响应体系任务处置系统的构建较为合理, 任务的驱散能力构建相对较好, 抓捕能力的构建稍弱, 但其整体构建距离最优选方案还有一定调整的空间。 其他系统的能力构建综合评判按照上述方法可依次得出。 综合结果不断调整, 优化改进指标建设, 从而得出更优的体系构建。
参考文献:
[1] Teague E, Kewley R H, Jr. Swarming Unmanned Aircraft Systems, DSETR0808[R]. West Point: Operations Research Center of Excellence, 2008.
[2] 王立民, 付勇, 李强, 等. 基于DoDAF的武器装备体系需求分析方法[J]. 计算机工程与设计, 2009, 30(22): 5266-5268.
Wang Limin, Fu Yong, Li Qiang, et al. Requirement Analysis Method of Weapons SOS Based on DoDAF[J]. Computer Engineering and Design, 2009, 30(22): 5266-5268.(in Chinese)
[3] 李龙跃, 刘付显. DoDAF视图下的反导作战军事概念建模与仿真系统设计[J]. 指挥控制与仿真, 2012, 34(5): 76-80.
Li Longyue, Liu Fuxian. Concept Model and Simulation System Design of the Ballistic Missile Defense Based on DoDAF Views[J]. Command Control & Simulation, 2012, 34(5): 76-80.(in Chinese)
[4] 周菁, 杨鸣坤, 王磊, 等. 基于DoDAF的有/无人协同特战系统总体结构设计[J]. 兵工自动化, 2021, 40(1): 3-7.
Zhou Jing, Yang Mingkun, Wang Lei, et al. Overall Architecture Design of Manned/Unmanned Cooperation Special Combat System Based on DoDAF[J]. Ordnance Industry Automation, 2021, 40(1): 3-7.(in Chinese)
[5] 王新尧, 曹云峰, 孙厚俊, 等. 基于DoDAF的有人/无人机协同作战体系结构建模[J]. 系统工程与电子技术, 2020, 42(10): 2265-2274.
Wang Xinyao, Cao Yunfeng, Sun Houjun, et al. Modeling for Cooperative Combat System Architecture of Manned/Unmanned Aerial Vehicle Based on DoDAF[J]. Systems Engineering and Electronics, 2020, 42(10): 2265-2274.(in Chinese)
[6] 李大喜, 张强, 李小喜, 等. 基于DoDAF的空基反导装备体系结构建模[J]. 系统工程与电子技术, 2017, 39(5): 1036-1041.
Li Daxi, Zhang Qiang, Li Xiaoxi, et al. Architecture Modeling for Equipment of Airborne AntiMissile Based on DoDAF[J]. Systems Engineering and Electronics, 2017, 39(5): 1036-1041.(in Chinese)
[7] Wohler M, Schulte A. On Board Assistant System for UAS Integration into Civil Airspace[EB/OL].(2013-08-15) [2022- 11-03]. https:∥arc.aiaa.org/doi/pdfplus/10.2514/ 6. 2013-5047.
[8] DoD Architecture Framework Working Group. DoD Architecture Framework Version 2.0 Volume 2: Architectural Data and Modes [R].US: Department of Defense, 2009.
[9] 王灿, 纪浩然, 郭齐胜, 等. 基于DoDAF的陆上智能突击系统作战概念系统开发[J/OL]. 系统仿真学报, 2022: 1-10.
Wang Can, Ji Haoran, Guo Qisheng, et al. Development of Operational Concept System of Land Intelligent Assault System Based on DoDAF [J/OL]. Journal of System Simulation, 2022: 1-10. (in Chinese)
[10] 張乃千, 王扬, 段振涛, 等. 基于DoDAF-OODA的战场融合通信系统保障体系结构研究[C]∥第十届中国指挥控制大会论文集(上册), 2022: 97-101.
Zhang Naiqian, Wang Yang, Duan Zhentao, et al. Research on Support Architecture of Battlefield Fusion Communication System Based on DoDAFOODA [C]∥ Proceedings of the 10th China Command and Control Conference (Volume I), 2022: 97-101. (in Chinese)
[11] 刘烜, 钱国红, 周益. 面向需求的无人机系统作战效能评估[J]. 火力与指挥控制, 2011, 36(7): 88-90.
Liu Xuan, Qian Guohong, Zhou Yi. RequirementOriented Operational Effectiveness Evaluation of UAS[J]. Fire Control & Command Control, 2011, 36(7): 88-90.(in Chinese)
[12] 陳松辉, 邱宏理. 基于AHP和模糊综合评判法的登陆作战效能分析[J]. 舰船电子工程, 2013, 33(2): 91-93.
Chen Songhui, Qiu Hongli. Study of Landing Operational Effectiveness Criteria Based on the AHP and Fuzzy Synthetical Evaluation[J]. Ship Electronic Engineering, 2013, 33(2): 91-93.(in Chinese)
[13] 张兵志, 郭齐胜. 陆军武器装备需求论证理论与方法[M]. 北京: 国防工业出版社, 2012.
Zhang Bingzhi, Guo Qisheng. Theory and Method of Requirement Demonstration for Army Weapon Equipment[M]. Beijing: National Defense Industry Press, 2012.(in Chinese)
[14] 于小岚, 熊伟, 韩驰, 等. 天基信息支援装备体系作战效能评估方法研究[J/OL]. 系统仿真学报, 2022: 1-15.
Yu Xiaolan, Xiong Wei, Han Chi, et al. Research on the Operational Effectiveness Evaluation Method of SpaceBased Information Support Equipment System [J/OL]. Journal of System Simulation, 2022: 1-15.(in Chinese)
[15] 荆涛. 重大自主创新装备需求论证的系统工程方法研究[J/OL]. 系统科学学报, 2022: 1-7.
Jing Tao. Research on the System Engineering Method for Requirement Demonstration of Major Independent Innovation Equipment [J/OL]. Journal of Systems Science, 2022: 1-7. (in Chinese)
Design of Emergency Response Architecture of Unmanned Aerial Vehicle Swarm Based on DoDAF
Chen Lu*, Wu Husheng
(Engineering University of PAP, Xian 710086, China)
[HT]Abstract: Using Unmanned Aerial Vehicle(UAV) swarm to deal with emergencies is an efficient handling mode. In order to establish a comprehensive security prevention and control system from the ground to the air, from the plane to the threedimensional, the UAV swarm emergency response system model for emergencies is built by using the Department of Defense Architecture Framework(DoDAF), and the system structure, task activities, organizational relationships, ability indicators and other models of the system are established based on the task requirements. With AHP(Analytic Hierarchy Process)and fuzzy synthetic evaluation method, the capability requirements are analyzes combining qualitative and quantitative methods. The analysis provides support and research perspectives for the application requirements and demonstration for UAV emergency warfare.
Key words: UAV swarm; DoDAF; analytic hierarchy process(AHP); fuzzy synthetic evaluation; emergency response architecture; weapon equipment
