机载蓝绿激光测深的研究进展*
2023-08-30李厚朴
郑 彤 李厚朴
(1.海军装备部驻武汉地区第五军事代表室 武汉 430000)
(2.海军工程大学 武汉 430000)
1 引言
“21 世纪海上丝绸之路”战略的提出,促进了海洋测绘的发展。作为海洋测绘的重要基础数据,海底地形数据的精度直接影响到海洋信息的表达效果。因此,海底地形数据的精密获取和分析处理在海洋测绘工作中必然占据着非常重要的地位。
目前,海道测量,港口航道疏浚以及海洋工程探测的作业,一般是采用声纳测量设备,将设备安装在船舶上开展作业。声纳信号无法穿过水与空气的分界面,只能在水下高速传播,这种状态导致海洋测量受制于海洋环境,尤其是测量平台的船速,以及测量海洋海况的限制,无法开展大面积灵活、快速的测量作业。
回声测深是目前非常成熟,应用较为广泛的水深测量手段,多波束测深系统和单波束测深仪是最为典型的测深设备代表。特别是后发展起来的多波束测深包括多波束声学子系统,数据采集、处理子系统和多波束空间位置传感器子系统。以20 世纪80 年代末为起点,商用多波束测深系统技术日趋完善,出现了不同类型的新型多波束系统。多波束测深系统在深水测区具有很大的优势,但在50m以浅水域的测量效率并不高,实现全覆盖测量一般需要布设较为密集的测线,测量作业时耗时较大。而机载激光测深可以一定程度上解决此类缺点。
机载激光测深,简称为“测深LiDAR”,对应的英文为Bathymetric Light Detection and Ranging,是近二三十年新发展起来的高效的海洋测深技术之一,集成了激光、自动控制、航空、GNSS、计算机等一系列前沿技术,它用飞机作为搭载平台,机载传感器发射激光束探测其下方水深的一种先进的测深方法[1],其系统工作原理图如图1所示。

图1 机载激光测深系统原理图
我国的大陆岸线约为18000 多千米,管辖约300多万平方千米的海域面积,拥有6500多个面积大于500 平方米的岛屿,岛屿的海岸线合计长达14000 多公里,蕴藏着丰富、宝贵的海洋矿产与生物资源。针对我国海岸线绵长,岛屿众多的国情,利用机载激光开展高精度的水深测量技术具有特别重要的实用价值。随着我国开发丰富的海底资源,周边相邻各国对其都是虎视眈眈,而蓝绿激光比其他波长的电磁波辐射具有更强的海水穿透能力,可以利用它来搜寻潜艇[3]。机载激光测深系统在测量作业时是主动测深方式,在沿岸浅于50m的水域,该技术更可以发挥其优越性。主要优点如下[4]:
1)覆盖宽度仅与飞机平台的航高和激光测深系统测量条带宽的高比有关,不受测量区域的水深影响,而多波束测深系统则不具备这一显著的优点;
2)飞机平台在测量作业时其速度远远快于船速,因而机载的方式具有非常高的测深效率和机动性;
3)机载激光测深系统可以实现水域和陆地同时测量,也就是说在岸线附近,可以一边测量水深,一边测量岸线附近的地形。
机载激光测深系统具有诸多优点,包括:精度高、低消耗、测点密度高、覆盖面广、测量周期短、易管理以及高机动性等。但机载激光测深技术涉及诸多学科,体系复杂,研制难度很大,当前我国对该技术处于跟踪、研制阶段,尚没有形成用于测量作业生产的产品,还存在许多技术问题亟待解决。
2 机载激光测深系统的发展
机载激光测深最早于20 世纪60 年代后期提出,开展海洋激光探测技术研究与应用最早的国家是美国。美国Syracuse 大学的Hogg 和Hickman 于1968 年验证了利用激光测量水深技术的可行性,建立了激光海洋探测技术的初步理论基础,从而研制了世界上第一套激光海水测深系统[5~6]。随着科技的发展和进步,一些国家如美国、加拿大、澳大利亚、法国、奥地利、俄罗斯、瑞典、荷兰、中国等开始探索发展机载激光测深技术[7]。
目前,国际上发展成熟度较高的5 种机载激光测深系统是澳大利亚的LADS 系统、瑞典的Hawk Eye 系统、加拿大的SHOALS 系统、美国NASA研制的EAARL 系统,以及由SHOALS 系统的升级版本CZMIL 系统。上述机载激光测深系统的测量原理基本相同,但由于研制技术储备、应用验证等方面的因素,不同系统的功能和技术指标之间的差别还比较大。加拿大OPTECH 的SHOALS 3000T 作为其最新型号,可以根据应用场景选配高光谱遥感、高分辨率数码相机以及超光谱等不同模式的先进配件,具有水深、地形同步测量功能,是已成功定型的商业机载激光测深系统。HawkEye II 型系统设备,具有技术先进、成本效益高、海域与陆地可以无缝测量等优点。Hawk Eye II 系统研制后主要销售给瑞典皇家海军沿岸测量队以及挪威的Blom 公司。海军部沿岸测量队充分利用Hawk EyeⅡ系统的技术优势,完成了许多复杂的测量任务,提供了有效的保障服务,在上述业务的基础上向世界范围内提供更多的测量服务。澳大利亚TENIX 的LADS MK II 系统装备于冲8-202 飞机平台并开始投入工程应用中,能够为较深的海区提供更有效、更快捷和更高精度的服务。美国NASA 在EAARL系统实验的基础上进行了改进,研制了新型的机载搜索激光雷达(EAARL)系统,它具备近岸水深、沙质海滩、珊瑚礁以及沿岸植被同时测量的机载激光雷达系统。相较于传统的机载测深激光雷达,EAARL 有四个主要特征:相对短的激光脉冲(1.3ns);更窄的接收视域(FOV)(1.5mrad~2mrad);实时后向散射数字化振幅波形信号;用软件代替实时信号处理硬件单元。
在国内,开展过激光水下探测系统研制与论证工作的单位有:上海光机所、青岛海洋大学、华中科技大学、西安光机所、长春光机所以及西安测绘研究所等,但是限于技术储备等因素,都没有研制出投入生产的成品。国内学者李树楷于1996 年在集成INS、GPS、扫描成像仪和扫描激光测距仪的基础上,研制出了一套新颖的航空遥感系统原理样机。海军海洋测绘研究所联合中国科学院上海光机所在国家863 计划的资助下,对机载激光测深系统开展了深入的研究,研制出了系统原理样机,并在我国的南海海域进行了飞行测量试验,成功地获取了非常有价值的试验数据。
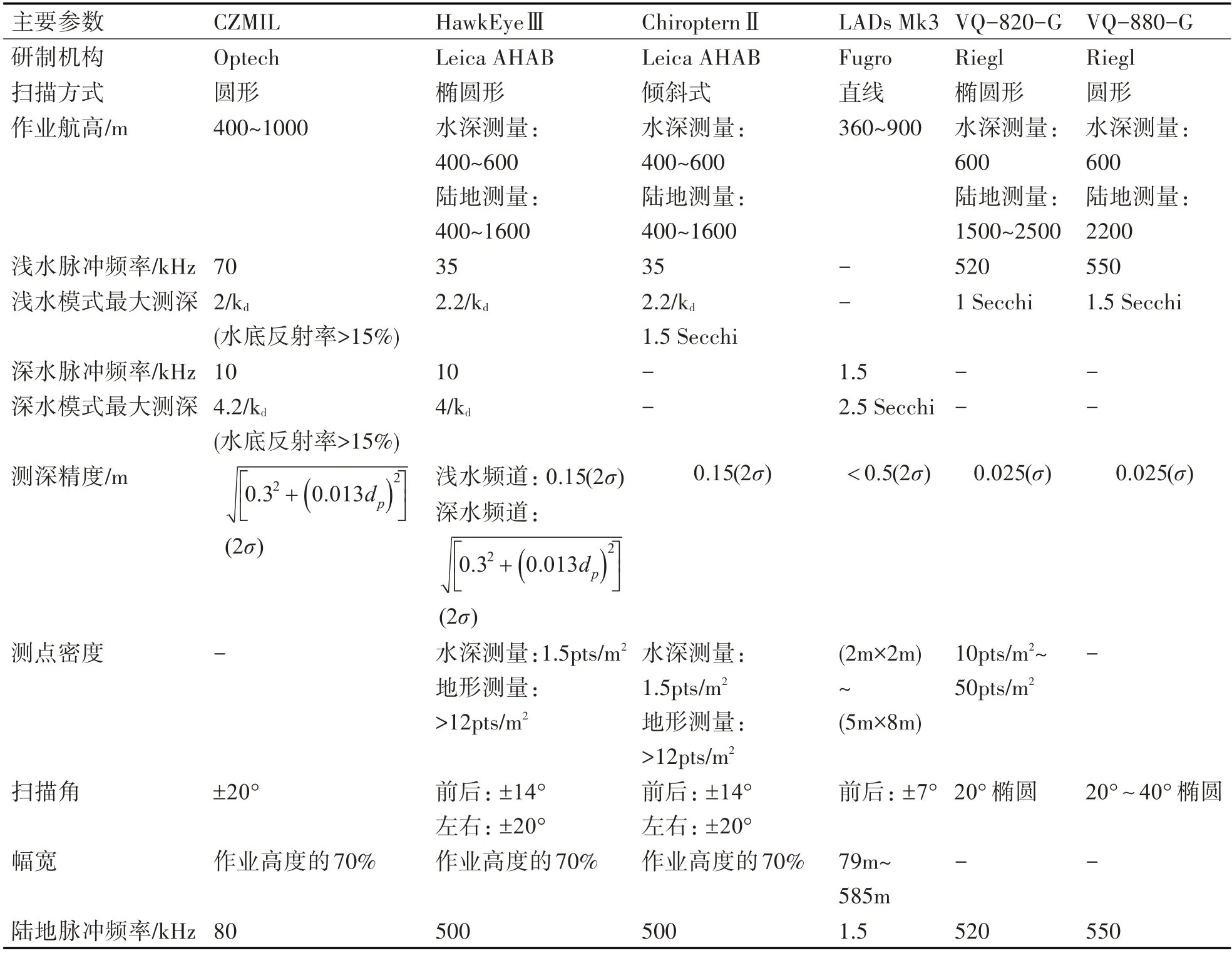
表1 主流的机载激光测深系统技术参数对比表
3 机载激光测深数据处理技术研究进展
3.1 国外研究进展
自1968 年美国科学家成功研制第一台激光水下测量系统以来,利用机载激光水深探测技术确定海底水深等的各种理论与方法得到了飞速的发展。Guenther G(1978,1989),Hickman G(1969),Muirhead K(1986),Banic J(1986),Hoge F(1980),Curran T(1988),Lillycrop W(1998),Steinvall O(1998),Ralph H(1998),Ackermann F(1999),Baltsavias E(1999,2000),Wehr A(1999),Toni S(2001),Krabill W(2000),Martin(2001),Vikramjit(2005),Torbjorn(2012),Bowens A(2011),Doneus M(2013),Irish J(1998),Nayegandhi A(2009),Monfort C(2011),Pastol Y(2011),Xhardé R(2011),Brock J(2006),Stockdon H(2009),Chust G(2008),Colin A(2010)等国外专家学者在机载激光测深方面做了很多研究,产生了很多成果。Kerker M(1969)分析了激光在大气中传输的特性,分析得出了激光光束与传输介质相互作用由此产生的吸收、散射导致激光衰减的量化分析结果;Guem Y 等(1976)给出了用二维高斯分布描述海浪的斜率分布,同时通过试验发现激光束在穿越大气海水界面时,光束特性的改变将直接影响探测效果。Schippnick P F(1990)通过试验得出了机载激光在进行水深测量或进行水下小目标探测时,建立了海水中准直光束的传输唯像理论模型。Hickman 等(1972)证实了机载激光的测深能力受限于水中的衰减系数和散射系数之比,发现了蓝绿光从海面向海底的传输,以及海底向海面的传输是两种不同的过程,采用有限尺寸光源的距离定律和激光水下传输的唯像理论模型,试验表明该模型的采用可以较全面地分析机载激光测深能力的影响因素,能够更精确地计算机载激光测深能力。
随着惯导、激光、GNSS 定位、北斗和计算机等多种技术的全面进步,机载激光测量水深的性能也在不断提高。为提高水深测量精度,目前机载激光水深测量开始数据处理方面研究,针对如何合理、有效地提取激光回波信号的技术问题上,Billard B.等(1986)提出了一种包括在回波信号中应用高通滤波剔除信号的低频部分,同时在对两种高频脉冲识别的基础上再进一步处理在回波信号中探测海底反射信号的运算法则;Guenther G.C.等于1988年论述了处理回波信号波形的方法,使用了启发式的识别规则,对海表和海底的回波信号进行识别;Wong H.等(1991)论述了每一束回波被分解成两组独立信号,即海表反射信号和海底反射信号,再依据这两种回波信号中进行水深的估算。在估算水深之前分离出水表和水底反射信号的原因是当水深比较小时,水底回波反射信号可能会与水表回波反射信号发生重叠,或者在水质比较浑浊的情况下,后向散射回波信号与海表、海底的回波信号的发生重叠的水深自动估算方法;Wong H 同时还指出,信号重叠是水底回波信号产生偏移的主要原因,最不理想的情况是水底反射信号完全嵌入在回波信号当中。
3.2 国内研究进展
相比国外,我国于20 世纪80 年代初才开展了机载激光水深测量技术的研究。刘经南(2002),刘焱雄(2014,2017),李庆辉(1996),陈文革(1998),黄谟涛(2000),叶修松(2010),昌彦君(2001),朱光喜(2002),翟国君(2006-2014),申家双(2002),欧阳永忠(2003),任来平(2002),吴自银(2005),李家彪(2001),阳凡林(2008),李海森(2012),赵建虎(2008),秦海明(2016),王越(2014),张永生(2015),徐启阳(1996-2002),刘基余(2000),姚春华(2003),陈卫标(2004),戴永江(2002),赖旭东(2010),刘基余(2000),王建军(2014),张国威(2002)等国内的专家学者对机载激光水深测量进行了软硬件及算法理论的研究。陈文革等(1997)研究了采用蒙特卡洛模拟法的探测水下目标的海洋雷达系统光束扩散的问题;任来平等(2002)介绍了机载激光测深技术的椭圆扫描原理,并且推导了该方式下计算激光海面扫描轨迹的数学模型。在对当前机载激光测深系统研究分析的基础上,翟国君等(2014)结合我国机载激光测深技术的研究现状,总结了4 项系统研制的难点与关键技术,分析了海洋测绘中采用该技术在的意义与重要作用[7]。刘经南(2002)、张永生(2016)研究了机载激光系统误差分析问题,陆秀平(2011)、刘基余(2000)、陈卫标(2004)、姚春华(2004)等对机载激光测深精度和最小可探测深度进行了十分详细的分析和描述。任来平(2002)、申家双(2003)、黄谟涛(2000)、欧阳永忠(2002)等对测深位置归算与载体姿态及波浪改正技术进行了研究。徐启阳(1996)等对唯像雷达方程进行了分析研究。
4 结语
鉴于机载激光测深系统具有覆盖面广、精度高、测量周期短、测点密度高、易管理、低消耗、高机动性等特点,已成为开展快速高效水深测量的最具发展前途的手段之一。同时,机载激光测深数据分析问题得到深入研究,国内外学者为此取得了大量富有成效的研究成果。但是在我国机载激光测深技术研究开始较晚,有许多关键性技术难题没有破解,又没有实测数据支撑,其数据处理理论与方法体系还需完善,面临的挑战更大。
