基于悬停驻留的大口径鱼雷水下引爆定位控制*
2023-08-30郑振马蛟
郑 振 马 蛟
(中国人民解放军91129部队 海口 570311)
1 引言
鱼雷作为水下制导武器,在反潜和反舰作战中发挥重要作用,鱼雷的攻击破坏性较大,在不发动实质攻击的前提下为提高大口径鱼雷的攻击对敌攻击的威慑力,需要在一定的安全距离下实现鱼雷引爆,对此需要构建一种优化的大口径鱼雷水下引爆定位控制模型,结合对鱼雷对敌目标的深水探测和回波检测技术,采用声呐定位装置,实现对大口径鱼雷水下引爆定位和自动引爆装置设计。研究相关的大口径鱼雷水下引爆定位控制技术,在优化鱼雷的对敌攻击应用效能方面具有重要意义。
对大口径鱼雷水下引爆定位控制是建立在对整个水下航行阶段的运动模型分析技术,构建大口径鱼雷水下引爆定位控制约束参数,采用模糊控制和多维约束参量自适应补偿方法,实现对大口径鱼雷水下引爆定位控制优化设计,传统方法中,对大口径鱼雷水下引爆定位控制方法主要有能量梯度修正的大口径鱼雷的航向校正方法、PID 控制方法和神经元控制方法等,以大口径鱼雷航行的偏航角、俯仰角和横滚等信息为约束参量,进行鱼雷对敌攻击的曲线修正和反馈跟踪控制,但传统方法进行大口径鱼雷水下引爆定位控制的可靠性不好,稳定性不好。针对上述问题,本文提出基于悬停驻留的大口径鱼雷水下引爆定位控制技术。建立大口径鱼雷的水下动力学和运动学模型,以大口径鱼雷航行的偏航角、俯仰角和横滚等信息为约束参量,采用鱼雷运动状态试验参数数据辨识水下流体动力参数和系统性能参数,结合参数辨识法建立鱼雷动力学输入输出响应模型,采用有限元分析方法建立鱼雷水下悬停驻留的湍流模型,通过调整鱼雷的位置和姿态,结合回波探测技术,采用定位扫描和悬停驻留技术实现鱼雷因定位引爆控制。最后进行实验测试分析,展示了本文方法在提高大口径鱼雷水下引爆定位控制能力方面的优越性能。
2 大口径鱼雷的水下动力学和运动学模型及控制约束参量
2.1 大口径鱼雷的水下动力学和运动学模型构建
为了实现对大口径鱼雷水下引爆定位控制,需要进行大口径鱼雷的运动数学模型分析,构建水下航行阶段的纵向运动数学模型,在建立大口径鱼雷的纵向运动模型之前,先做如下几点基本假设[6]:1)大口径鱼雷的外体结构为刚体模型,其外形关于水平面和水下纵向运动平面的交集坐标系x1Oy1对称;2)大口径鱼雷的偏航、横滚及阻尼力等参数满足线性假设;3)压载水舱排水并在垂直推进器的作用下上浮实现返航;4)近似认为大口径鱼雷的纵向运动平面坐标系为惯性坐标系。并定义关于大攻角时的流体动力特性的速度坐标系Ox3y3z3、体坐标系Ox1y1z1、大地坐标系Ox2y2z2、球面坐标系Axyz。
根据上述假设,对海底驻留时的流体动力特性进行运动性能参数研究,分别描述为
结合大口径鱼雷水下运动水下驻留涉及的驻留方案、流体动力特性分析,采用特征运动方程得到铅垂面运动方程为Ox2y2,计算流体力学得到大口径鱼雷绕体坐标系各轴运动的纵向运动数学模型描述为
其中,θ为大口径鱼雷质心的弹道倾角;Mz为流体动力、声学等各方面的优化目标参数。
通过上述构建的大口径鱼雷的水下动力学和运动学模型,采用鱼雷运动状态试验参数数据辨识水下流体动力参数和系统性能参数,结合参数辨识法建立鱼雷动力学输入输出响应模型。
2.2 大口径鱼雷水下引爆定位的约束参量
在上述构建的大口径鱼雷纵向运动数学模型的基础上,针对海底驻留UUV 低航速、远航程的特点和要求,采用模型参数匹配,得到海底驻留UUV的外形优化模型参数和跟踪控制律为
其中,V表示大口径鱼雷质心加速度,m和h分别是大口径鱼雷的转向约束变量,n是表示航行器头部丰满系数。Cm是阻力系数,Iext则表示流体动力布局模式下的水平、垂直鳍舵惯性参数。gNa、gk和gL是鱼雷对敌攻击的偏角、迎角、升阻比,反映了鱼雷的有效攻击区域内的定位参数。VNa、Vk和VL分别表示大口径鱼雷质心的速度、标准弹道平衡参数。由此得到鱼雷水下引爆定位动静力布局效果图如图1所示。

图1 鱼雷水下引爆定位动静力布局效果图
3 控制方法优化设计与实现
3.1 模糊参数融合和自适应参数调节的路径规划
采用鱼雷运动状态试验参数数据辨识水下流体动力参数和系统性能参数,结合参数辨识法建立鱼雷动力学输入输出响应模型,进行鱼雷水下定位跟踪控制,本文提出一种基于悬停驻留技术的大口径鱼雷水下引爆定位控制方法。基于运动稳定性特征分析,分析UUV 保持运动状态的能力,若海底驻留UUV 在受扰动后,随着时间的增加,能够恢复到未扰动时的运动状态,则称运动是稳定的,否则便是不稳定的。采用Lyapunove 自适应控制律],得到控制输入输出参量模型描述为
通过扰动参数分析,得到扰动运动方程组的参考输入模型为
将大口径鱼雷水下引爆定位控制的非线性系统进行分解,把大口径鱼雷受到的水流和涡流扰动分解为确定部分和不确定部分两部分,对水平海底和有小倾角海底两种情况下水流侧向流过时UUV的受力特征进行融合分析,得到受力融合模型为
其中,K为海水斜向上的应力参数,xc(t)为惯性力矩,为了便于研究垂推对航行器海底受力特性的影响,本文包括有垂推和无垂推两种水下航行器模型。对于垂推,本文只考虑垂推几何因素的影响,不考虑其动力特性,得到扰动方程描述为
其中,x(k)∈Rp表示大口径鱼雷的舵角参考输入特征状态,u(k)∈Rq表示大口径鱼雷的俯仰角跟踪误差,z(k)∈Rm表示后支撑机构的动力特性参数,A,B,C为适当维数矩阵,基于几何因素参数调节,得到鱼雷的流体动力学参数统计特征量为
其中,P、R为正定矩阵,对于无人水下航行器(UUV)水动力计算这类绕流问题,一般通过建立一个适当的虚拟边界,将绕流问题转化为内流问题,在虚拟边界与UUV形成的空间区域内求解,得到:
根据上述分析,采用鱼雷运动状态试验参数数据辨识水下流体动力参数和系统性能参数,结合参数辨识法建立鱼雷动力学输入输出响应模型,实现模糊参数融合和自适应参数调节的路径规划。
3.2 大口径鱼雷水下引爆定位优化控制律改进实现
从航行器运动状态试验数据中,辨识出流体动力参数和其他表征系统性能的参数的方法称为参数辨识法,其可以通过研究航行器的输入输出响应,或正常航行时的输入输出特征量,得到大口径鱼雷水下引爆定位的跟踪识别的误差为
采用俯仰参数识别,采用模型参数滤波和PID控制,得到大口径鱼雷水下引爆定位的误差修正一阶求导:
基于误差扰动抑制,通过悬停驻留的稳态跟踪控制[11],得到垂推几何因素约束下的自整定性函数为
其中c1、λ1均大于零,采用Lyapunov 指数求导,采用有限元分析方法建立鱼雷水下悬停驻留的湍流模型,通过调整鱼雷的位置和姿态,结合回波探测技术,实现鱼雷的定位探测,并采用定位扫描和悬停驻留技术实现鱼雷因定位引爆控制[12]。
4 仿真实验与结果分析
为了测试本文设计的控制方法在实现大口径鱼雷水下引爆定位控制的应用性能,进行仿真实验分析,仿真实验建立在Matlab Simulink 的大口径鱼雷仿真平台基础上,考虑航行器尺寸的限制,变浮力系统的位置被限制在-2.4m~1m 之间,跟踪角度值为2.8°的正弦信号和阶跃信号,大口径鱼雷航行的初始速度为50Kn,航行器着陆时地面坐标系中轴向速度、XY 方向运动的位移随注水变化的信息表见表1。
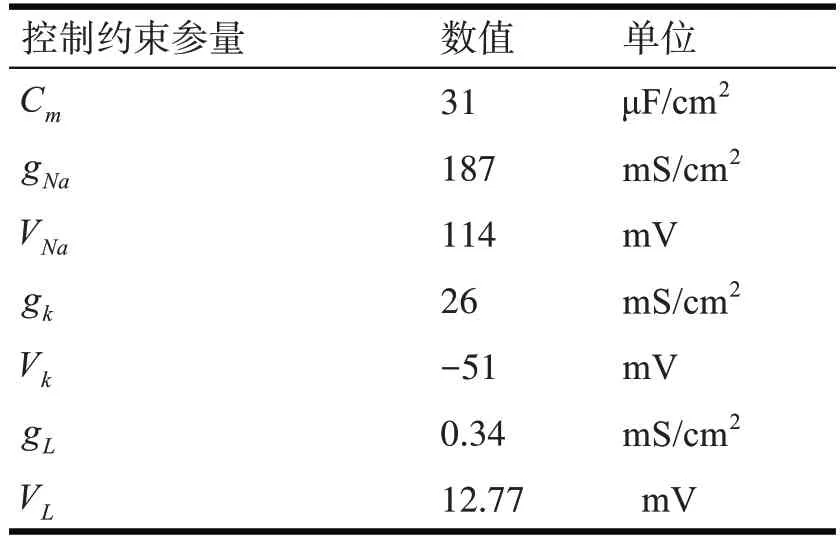
表1 大口径鱼雷视觉能量优化控制约束参量模型的参数值
根据上述仿真环境和参量设定,进行大口径鱼雷水下引爆定位控制的仿真测试,采用有限元网格分析,得到初始攻击位置分布如图2所示。

图2 鱼雷初始攻击位置
采用本文方法,分析注水位置和注水质量对航行器着陆速度、位移、总着陆时间和垂推作用时间的影响,结合鱼雷的俯仰角跟踪和参数定位识别,得到鱼雷水下引爆的末端位置如图3所示。
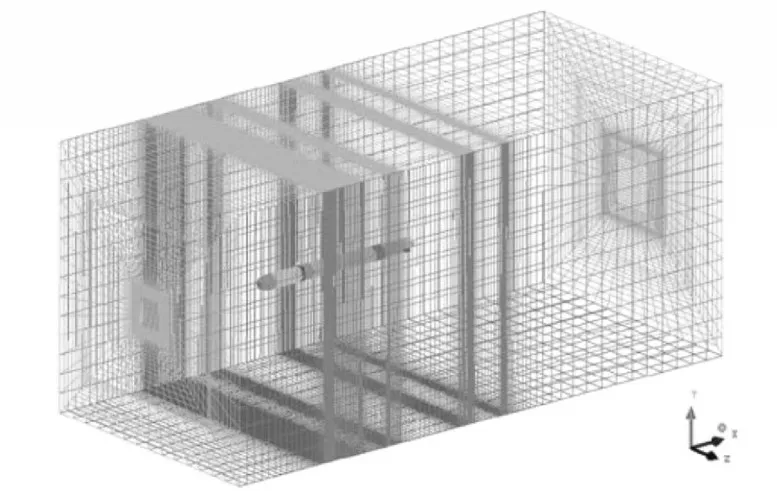
图3 鱼雷水下引爆的末端位置
分析图3 得知,本文方法能有效实现对大口径鱼雷水下引爆定位控制,测试鱼雷对敌攻击的输出冲激响应,如图4所示。

图4 攻击冲激响应特征分析
分析图4 得知,本文方法能有效识别敌方目标,冲激响应特征分辨力较高,能有效实现对敌目标攻击,输出鲁棒性和稳定性较好,收敛误差曲线如图5所示,分析得知,本文方法的收敛误差较低。

图5 收敛误差测试
5 结语
构建一种优化的大口径鱼雷水下引爆定位控制模型,结合对鱼雷对敌目标的深水探测和回波检测技术,采用声呐定位装置,实现对大口径鱼雷水下引爆定位和自动引爆装置设计。本文提出基于悬停驻留的大口径鱼雷水下引爆定位控制技术。建立大口径鱼雷的水下动力学和运动学模型,采用有限元分析方法建立鱼雷水下悬停驻留的湍流模型,通过调整鱼雷的位置和姿态,结合回波探测技术,采用定位扫描和悬停驻留技术实现鱼雷因定位引爆控制。测试得知,本文方法的收敛误差较低,冲激输出响应能力较强。
