南海声速剖面及其对吊放声纳作用距离的影响*
2023-08-30曾源春董彩萍陈宇豪司军伟
刘 敏 曾源春 董彩萍 陈宇豪 司军伟
(1.海军航空大学 烟台 264001)(2.91856部队 上海 201900)(2.92635部队 青岛 266100)
1 引言
目前,我国海域,特别是南海海域正面临着复杂的水下威胁,同时由于各种潜艇降噪、消声等技术,使得声纳对潜艇的探测难度越来越大。为了应对复杂的海上形势,我们需要不断地提高装备的作战使用效能。同时,由于海洋环境的复杂多变,实际的声传播特性会随着时间、空间以及目标的不同而千差万别,从而使得装备的使用也必须要因时因地灵活改变。因此有必要对我国周边海域的实际海洋环境特性进行长期的测试,分析研究并其统计特性,从而有效地指导装备的使用[1]。
本文以Argo浮标在南海东北部,北纬21.058°、东经118.971°附近海域10 个月的实测温深数据为基础展开研究,首先计算其声速剖面数据,分析其统计特性;然后基于BELLHOP 模型计算其声传播损失,分析研究航空吊放声纳在该海域的作用距离特征,为吊放声纳在该海域附近的作战使用提供参考,也为其它海域Argo 数据的分析和研究提供方法参考。
2 数据来源
Argo 计划自2000 年底实施,是全球海洋观测系统中的一个实验计划,该计划将在全球海洋中布放3000 个Argo 浮标,提供全球海洋2000m 深度以上的次表层温、盐度资料,目的就是为了加深对海洋气候的系统认识。中国Argo计划从2002年初组织实施,早期主要使用进口Argo 浮标,使用Argos和Iridium 卫星接收数据。2014 年起,研制国产Argo 浮标,数据直接通过“北斗剖面浮标数据服务中心”接收[2]。本文就以国产Argo浮标的测试数据展开分析。
2.1 数据点的选择
南海位于北太平洋西部边缘,南起赤道附近,平均水深1200m,水深超过1000m 的中央东北-西南走向的菱形海盆约占总海域其余海区面积的1/2[3]。
本文选择南海菱形盆地东北部,北纬21.058°、东经118.971°,距东沙群岛方位81°,224.75km 附近,深度2100m 左右,如图1 所示。该海域东北面通过台湾海峡与东海相连,东面通过巴林塘海峡与太平洋相连,距美驻日冲绳基地仅986.7km,是各国舰船航线必经之地,具有一定研究价值。
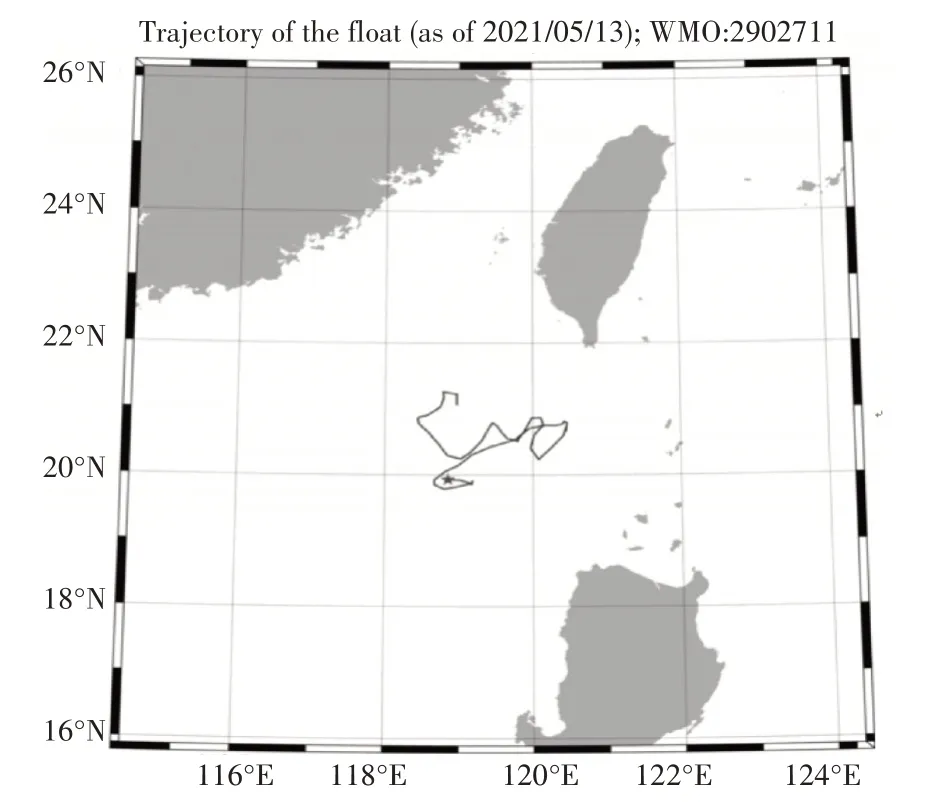
图1 浮标投放区域
2.2 实测数据
2020年8 月至2021年5月,使用Argo浮标持续对目标海域进行垂直方向的温深数据观测,共计采集到长达10 个月的实测数据,测试间隔设置为五天,在扣除个别时间的特异值后,测试期间每个月样本容量如下:8 月份6 个,9 月份6 个,10 月份6个,11 月份6 个,12 月份6 个,1 月份6 个,2 月份6个,3月份6个,4月份6个,5月份5个,共计59组数据。图2 为中国Argo 实时资料中心部分温深盐原始数据[1]。

图2 浮标部分温深盐原始数据
3 数据分析与处理
为了深入了解测试点声速剖面特性,本小节分别从季节变化和月变特征的角度,对该海域的声速剖面数据展开分析。
3.1 威尔逊公式
大多数情况下,海水中声速平均值近似等于1500m/s,但是在不同的环境下,海水声速值也会随之变化,其中影响声速的主要因素为温度,盐度和压力等。本文应用威尔逊公式来计算测试点的声速剖面,具体为[4]
上式中,C 为声速,T 为温度(℃)、S 为盐度(‰)、D为深度(m)、P为压强(Pa)。
3.2 测试点海域声速剖面结构分析
经过计算和分析,发现该海域的声速剖面图符合典型的Munk SOFAR 声道声速剖面图结构,表现出较强的分层特性,如图3所示。
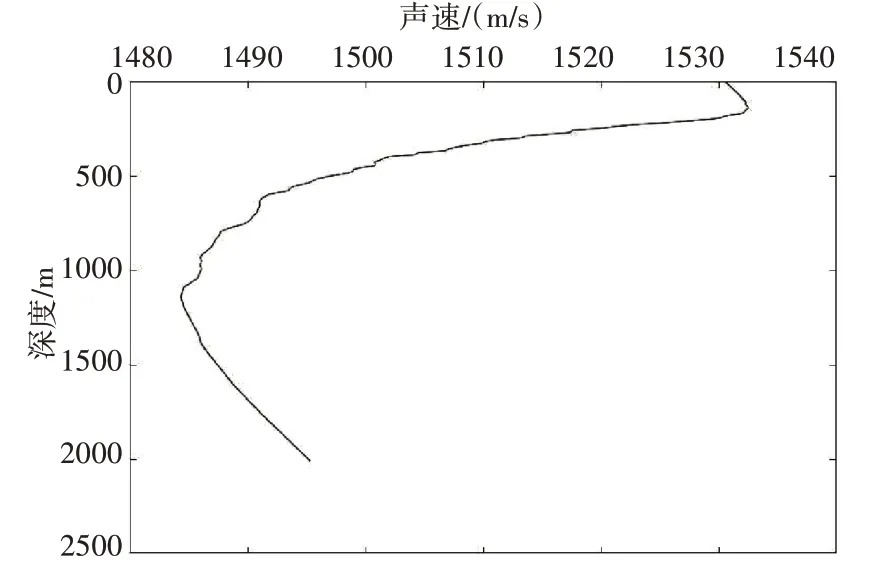
图3 测试点典型声速剖面结构图(2021/2/21,上图为北纬21.058°,东经118.971°)
由图3 可知,该海域声速剖面图可分为混合层,主跃层和深海等温层。混合层由于风浪和湍流作用温度较为均匀,声速主要影响因素为压强,故形成了正声速梯度变化。随着深度的增加,进入主跃层后,风浪作用显著减小,温度影响增强,该范围内水体得不到来自阳光的热量补充,进而随深度增加,温度逐渐减小,形成负声速梯度。
另外,Munk SOFAR 声道声速剖面图最重要的特点之一是存在一个声速极小值,其所在深度称为声道轴,在声道轴的上下方分别会出现声速负梯度以及声速正梯度。通过折射定律可知,声线的传播轨迹,会弯向声速减小的方向,因此声道内的小掠射角声线将由于声速梯度的变化被限制于声道内传播,非常有利于水声信号的远距离传播。通过对十个月的数据按月分组,剔除第一个样本(采集深度过浅,只有294.6m),然后进行月平均,得到2020年7 月26 日至2021 年5 月3 日期间内每月平均声道轴深度的变化情况,如图4所示。
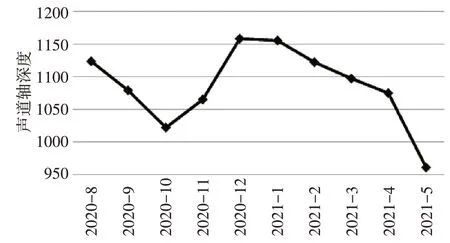
图4 测试点月平均声道轴深度
从图4 可以看出,在观测期间,不同季节平均声道轴的变化比较显著,其月平均值范围为960.72m~1158.72m,大多集中在1100m 左右,最高值出现在12 月,其数值为1158.72m,最低值出现在5月份,数值为960.72m。
3.3 测试点声速剖面月变化特征分析
为了获取水体混合层变化趋势,为吊放声纳布放深度做出建议,在分析排除特异值数据后,统计得出了声速剖面的月平均分布图,如图5 所示。将数据按照阳历3~5 月为春季,6~8 月为夏季,9~11 月为秋季,12~2 月为冬季的规律进行季节划分,这里仅列出4 月、8 月、10 月和1 月份的平均分布图。

图5 测试点月平均声速剖面图
混合层出现较为强烈的季节性变化,总体深度大约在60m~80m。在秋季以及春季混合层出现负声速梯度或者微弱的正声速梯度,如图中的(a)、(d)所示。相反在冬季以及初春,混合层出现正声速梯度,如图中的(b)、(c)所示。通过查询中国台风网历史资料显示,2020 年7 月没有台风生成,而进入八月份,台风数量明显偏多,特别是十月,相继生成了七个台风,追平了历史同期数量。因此,这段时间风浪的搅拌作用明显,形成的混合层温度较为均匀,受温度影响较小,受压力影响大,形成负声速梯度。而进入冬季,生成以及增强台风的有利条件减少,导致风流搅拌作用减小,温度成为影响声速主要条件,出现正声速梯度。
4 吊放声纳最佳工作深度分析
4.1 吊放声纳的作用距离模型
吊放声纳多工作于主动模式,主动声纳方程为[5]
优质因数如下:
其中SL 为声纳声源级,TL 为传播损失,TS 为目标强度,NL为海洋环境噪声级,DI为探潜设备接收指向性指数,DT为检测阈。在搜潜过程中,当FOM ≥TL时,即优质因数大于传播损失时,任务系统判定为设备搜索到潜艇目标。
4.2 吊放声纳最佳入水深度分析
本节利用BELLHOP模型对目标海域水声场进行仿真[6],仿真参数设置如下:吊放声纳的发射初始掠射角为±30°,在垂直方向0~300m 范围内每隔3m 均匀放置100 个接收机,在水平方向上0~5km范围内每隔100m 均匀放置50 个接收机,声束柱数Beams=1000,吊放声纳发射频率为2kHz,声源级SL=220dB,潜艇目标强度TS=20dB,检测阈DT=20dB,指向性指数NI=20dB,海洋环境噪声NL=50dB[7~8]。
根据图5 的数据分析结果可知,该海域海体表面混合层厚度60m~100m,考虑到实际潜艇运行时会针对航空反潜平台利用主跃层做战术规避动作,航行深度应该会大于混合层厚度。另外,由于潜艇制造工艺不同,其航行工作深度也会有限制,此处以中型潜艇为例进行研究,因此本文中潜艇的安全航行深度取150m~250m,在此区域内每隔10m 取点作为潜艇航行深度进行研究[9~10]。
选取2021 年3 月21 日所获样本数据为例,该样本混合层厚度为73m,混合层呈正声速梯度变化,混合层与主跃层交界处出现最大声速1524.46m/s,深度继续增加,呈现负声速梯度变化。利用BELLHOP仿真模型[11~2]进行计算,仿真得到吊放声纳在布放深度为80m,潜艇目标深度为170m 时,声线的传播损失图(如图6)和FOM-TL随距离变化图(如图7),可以看出,此时吊放声纳的最大探测距离为2872.13m。

图6 声线轨迹图
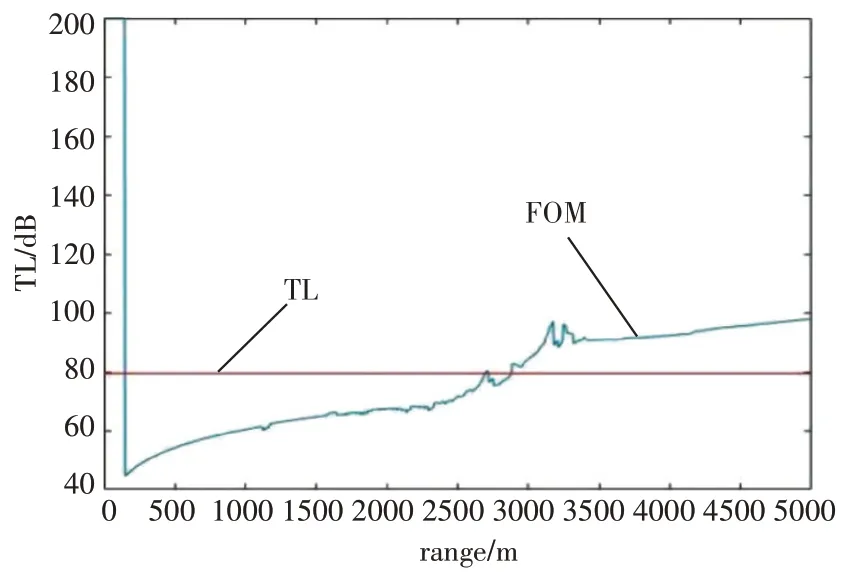
图7 深度为170m时传播损失图
将吊放声纳布设深度设定为80m~200m,潜艇航行深度设定为150m~250m,在此范围内,每隔十米作为样本数据进行研究计算,得出潜艇在不同深度下,吊放声纳布放深度对探潜距离的影响。获得共计143组数据,建立与之对应的三维图,如图8所示。

图8 探测距离与目标深度和吊放声纳深度的关系图
从图中可以发现,在该声速剖面条件下,探潜设备的布放深度能很大程度地影响吊放声纳的探测距离。布放深度越深,能拥有对航行深度较深的潜艇更好的探潜效果。
5 结语
针对实际使用中探潜设备使用深度不科学等问题,本文从全球海洋Argo 系统野外科学观测研究站批量获取北纬21.058°,东经118.971°附近海域10 个月内共计59 组数据,并利用威尔逊公式进行计算,得到每组数据的声速剖面图。在此基础上,首先详细分析了该海域的声速剖面结构和月统计特性,发现其声速剖面服从Munk SOFAR 声道声速剖面特性,其月平均值范围为960.72m~1158.72m等结论。然后利用BELLHOP 水声传播模型,利用声纳方程,分析了该海域吊放声纳作用距离与投放深度、目标深度等之间的关系,为实际吊放声纳的使用提供参考和依据。
