国外凝视型舰载红外搜索与跟踪系统综述*
2023-08-30朱耘
朱 耘
(华中光电技术研究所-武汉光电国家实验室 武汉 430223)
1 引言
舰载红外搜索跟踪系统(IRST)的主要作战使命是探测和跟踪低空和海面威胁,能够提供全景监视能力,凭借被动工作的特点不会受到射频杂波和电磁对抗措施的干扰,还能够与雷达和电子战传感器等其他舰载传感器互为补充,因为IRST 角分辨率高,而雷达的距离分辨率高,对这些传感器的输出进行融合能够对提高目标跟踪精度,缩短目标建航时间[1]。
20世纪70年代红外搜索与跟踪系统开始装备舰船平台,第一代系统是基于扫描红外探测器,其传感器头部旋转,更新率为1Hz~2Hz,尺寸大,虚警率高,稳定性不够,作用距离有限。第二代舰载IRST 系统仍然采用扫描体制,但采用长线列的红外焦平面阵列,利用时间延迟积分处理技术对单独的探测器单元的多个串行输出进行延迟和积分,提高了信噪比。
但这种基于扫描体制的系统仍存在一些无法克服的局限性,首先是每个像素上驻留的时间仅为几十微秒,故信噪比低,造成探测与航迹判决间存在显著的延迟。另外是更新率低,无法发挥高分辨率成像的优点。再者,单一的桅杆上安装扫描传感器头部的视场会受到安装位置和甲板上其它附属物的限制,存在盲弧区。另外,使用单一传感器时,如果出现关键的系统故障就丧失冗余性[2]。
到了21 世纪,海军舰船执行沿海任务的需求增多,遭遇非对称恐怖威胁的风险日益加剧,快速逼近的攻击飞机、无人机以及一些非常规的目标对战舰构成的威胁增大,尤其是小型船只或摩托艇等恐怖威胁,因此,新一代的舰载IRST 系统需要具有更大的俯仰角(通常需要达到10°左右)和作用距离(通常在18km 左右),解决的方案就是采用基于分布式凝视红外传感器的新型搜索与跟踪系统,即采用多个传感器头实现更灵活的舰上安装,并以高速率提供连续的全景警戒,增大俯仰角覆盖范围,提高数据刷新率,能够更迅速地建立目标航迹。
2 国外典型凝视IRST系统及技术特点
目前典型的凝视型IRST 系统主要有英国的凝视IRST 演示器、德国的SIMONE 系统、荷兰的Artemist Gatekeeper 系统以及以色列的Sea Spotter 系统等。
2.1 英国的凝视IRST演示器系统[3]
2.1.1 系统概述
这种凝视型IRST 演示器系统是由QinetiQ 和Thales UK 公司为英国国防部研制的一种演示器,其组成包括切分视场光学系统、传感器头部、传感器头部与遥控台之间的接口、探测与跟踪处理系统、数据记录系统等。
传感器头部具有两台中波红外MWIR 摄像机,均采用640×512 的焦平面阵列(FPA),水平视场40°,垂直视场4°,采用切分视场光学系统,输出数据通过光纤接口传输到信号处理器,据报道也有可能采用BAE Systems 公司开发的第三代ALBIO 3μm~5μm 1024×786 探测器。采用四个这样的稳定传感器头部安装在桅杆上或上层建筑的顶部以提供连续360°的覆盖范围。产品型系统计划用于Type 23 舰船性能升级、Type 45 舰船目标捕获性能增强计划以及成为未来航母的候选设备。
舰载IRST 传感器头部模块由焦平面阵列(FPA)探测器、探测器电子组件、致冷器、热管、光学系统、光纤通道电路板、FPGA 电路板、光束转向机构扫描器、BSM 的伺服电子、惯性测量装置、前窗、能量调节器以及结构外壳等组成。探测器电子组件包括读出电子线路、模数转换、非均匀性校正(NUC)、坏像素替代、模拟视频以及相关的电源模块等,都装在摄像机模块内,如图1所示。

图1 英国舰载凝视IRST传感器头部模块
多台摄像机安装在一个框体结构内,摄像机瞄准线间的夹角为17°。如果使用1024×768 探测器的话需要更换该框架才能适用于更大的视场。靠近探测器输入窗口处的滤光机构能实现滤光器的三选一。
光束转向是通过倾斜光学镜片来实现的,光学镜片装在与中间图像接近的转像光学系统内。每个方位一个光学镜片。完成基于场景的非均匀性校正(NUC)时,需要进行光束转向使图像从一个位置移至下一个位置读出。光束转向步长为10 像素,相当于在不到16ms 的时间内扫描板倾斜6.7°。在探测器积分时间期间,该机构还提供锯齿或斜坡波形用于艏摇稳定。
光学系统由一个外部窗口进行保护。每个物镜组有两个锗窗口,镀有适当的耐磨膜层。选择锗的主要原因是其良好的抗电磁干扰性能。
2.1.2 结构及光学系统技术特点
由于选用商用(COTS)摄像机实现全景覆盖范围,使用了切分视场光学系统,这样就将一个640×512像素探测器的视场转换为5∶1的纵横比。这种技术可有效地将覆盖舰船周围整个水天线所需的焦平面阵列探测器数量减半。
传感器头部包括一个光束转向机构,实现基于场景的非均匀性校正和后扫描能力,以便对长积分时间内舰船的运动进行补偿。光束转向机构还能实现微扫描以提高图像的锐度。
焦平面阵列探测器通过光学系统接收来自场景的辐射,光学系统由物镜组和转像组组成,如图2 所示。光学系统还能改变目标空间探测器的上下方向,使得水平视场有效地增加一倍而垂直视场减半。采用一对菱形反射镜的这种技术也被称为“切断折叠”(cut and stack)方法。第一个45°的反射镜在中间像位置将垂直视场切开,第二个反射镜使俯仰视线偏离并通过单个物镜组将单独的视场折叠起来。然后这些单独的视场在水平方向上偏离,通过棱镜使它们在方位方向上毗连。每个物镜组是一对消色差的光学热不敏硅或锗棱镜。尽管在直线方向上,转像和物镜都有一个共用的光轴,但这并不能确定探测器上或目标空间里的零俯仰,因此使用的视场是非对称的。探测器上的真零值是在探测器一半高度的中点上。这就意味着第二个切断和折叠反射镜不是呈45°,使该点在目标空间是水平的。整个系统的方位视场为36°,俯仰视场为3.8°。

图2 切分视场光学系统
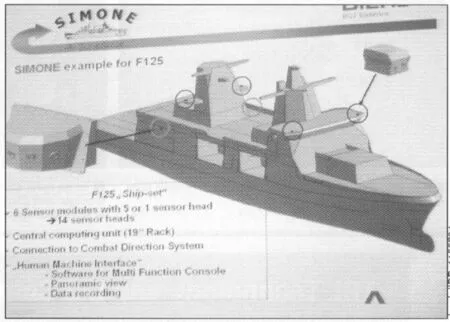
图3 SIMONE系统在F125舰上的配置方案

图4 SIMONE多传感器模块的模型图

图5 Gatekeeper的传感器监视警戒范围示例,舰上基本配置包括3个-4个传感器组件

图6 产品型Gatekeeper传感头部组件
图7 围绕舰船顶部桅杆安装的三个Artemis IRST传感器组件
该IRST 演示器设计为使用640×512 像素探测器,但不需要做大的改装也能够使用面阵1024×768 像素探测器,需要改变探测器格式和光机接口。由于探测器格式会影响视场以及瞄准方向,故反射镜和方位棱镜也需要改变。
2.2 德国的SIMONE系统[4]
2.2.1 系统概述
SIMONE 是由Diehl BGT 防御公司研制的红外监视、观察和导航系统,具有360°搜索能力,用于对潜在的非对称威胁目标提供自动早期探测,包括特种部队、恐怖袭击以及海盗等来自海面、海岸和空中的威胁目标。系统只采用被动凝视红外传感器,是一个“安静型”系统,不发射任何声信号或电磁信号,而且没有移动部件。
2017 年首套SIMONE 系统就服役到德国海军新型的F125 护卫舰上。在F125 舰载配置中,SIMONE包括两个多传感器模块(每个模块中有五个传感器),分别安装在直升机库的左舷和右舷;四个单传感器模块(两个位于舰桥顶上,前向观察,另外两个位于舷侧突出处的舰尾桅杆上,向舰尾方向观察);信号处理装置;视频服务器以及与作战管理系统的接口等。将所有传感器的输出图像进行拼接后生成360°全景图像。具有SIMONE 人机接口的操作员终端可以布置到舰船不同的位置,如舰桥上、作战信息中心、与舰船作战系统数据总线联接的个人笔记本电脑等。人机接口软件上可显示出SIMONE 全景观察图像,还可实现很多其它功能,如数据录取等。SIMONE 的还可引导其它光电传感器对目标进行观察。
2.2.2 技术特点
每个传感器都采用640×512 非致冷测微热辐射计探测器,工作于8μm~12μm。单传感器模块的方位覆盖范围为40°,俯仰范围为50°,五传感器模块的方位覆盖范围为196°,俯仰范围为50°。传感器镜头镀有高性能的红外光学膜层。该系统能够提供舰船周围360°方位50°俯仰范围的红外监视能力,目标探测能力为数公里,系统软件能够对1000多个目标实现实时全自动非对称威胁优先排序、跟踪启动和告警。
SIMONE 传感器的热分辨率为30mK,空间分辨率高,能够探测到低对比度的小目标,空间分辨率1mrad。系统还具有高更新率,能即时探测到快速、灵活的目标。对泳者的探测距离为300m~400m,对橡皮艇的探测距离为1000m~2000m,对小型飞机的探测距离为2000m~3000m。
2.3 荷兰Gatekeeper光电传感器系统[5~6]
2.3.1 系统概述
Thales Nederland 公司的Gatekeeper 是一种360°警戒与告警系统,目前系统装备到荷兰海军的“荷兰”级巡逻舰和比利时海军的M-级巡逻舰,成为安装在新型封闭式整合传感器桅杆的I-Mast 的传感器系统之一。Gatekeeper 传感器头部安装在I-Mast桅杆塔四个边缘的斜切面上,每个斜切面上传感器头部内装有三台高分辨率性能的320×240像素或640×480 像素的非致冷红外摄像机和三台高分辨率的彩色电视摄像机(1600×1200 像素或4000×2600像素),可360°监视舰体四周态势并跟踪特定的目标,在夜间或不良气候条件下可有效对海面或沿岸探测。系统依靠定期向窗口表面喷射清洗液然后用压缩空气吹干窗口表面的方法来保持摄像机窗口的清洁。
采用640×480 像素的热像仪,系统对水面上泳者的探测距离为500m 远,对水面小船的探测距离为4000m~5000m远。
2.3.2 技术特点
作为一种凝视非转动式传感器系统,Gatekeeper 能为港口内、陆上、锚停在海面或沿海航行的船只提供360°×36°的全景昼夜红外与彩色电视监视能力,自动探测与跟踪目标,辅助目标分类,并提供事件记录视频图像。其处理机柜重300kg,尺寸约606 mm×811mm×1820mm。其典型的舰载配置由三或四个传感器模块组成,每个模块重30kg 左右,尺寸约600mm×500mm×400mm,非致冷8μm~12μm红外摄像机视场为48°×36°,且共轴安装了彩色电视摄像机,视场为48°×36°。每个传感器模块在电子机柜内有一个单独的基于PC的处理器以及一个用于跟踪的PC 装置。Gatekeeper 的人机接口可与作战管理系统和/或舰桥系统组合在一起。另外,Gatekeeper 图像可显示在综合情报显示屏上或显示在遍布舰上任何位置的个人手持式计算机。周视观察的视频更新率为5Hz,可同时观察四个5°×5°的扇区。采用了最新的Gigabit Ethernet(GigE)摄像机接口。其图形处理功能强大,Gatekeeper 系统采用与Sirius红外搜索与跟踪系统中相同的成熟算法对水面目标进行探测。
据文献报首道,试验用样机采用的是FLIR Systems 公司的8μm~12μm 红外摄像机以及Imperx Incorporated公司的Lynx系列彩色电视摄像机。
2.4 法国Artemis 系统
2.4.1 系统概述
Artemis 系统由法国的Thales Land& Joint Systems公司研制,被设计为全凝视非旋转式电气稳定传感器组件,其典型组成包括三个传感器头,每个传感器头具有三个焦平面阵列(FPA),水平覆盖360°,俯仰范围25°(水天线以上15°,水天线以下10°),刷新率为10Hz。红外凝视摄像机采用极高分辨率的FPA,具有大范围的空间覆盖、远距离探测、反应时间短、虚警率低、数据和图像质量高等特点。
Artemis 既能够作为一个单独的装置使用也可组合到舰上作战管理系统,能够通过实时全景视频图像和超高分辨率变焦来进行目标跟踪、分类和认清。已有17 套舰载型产品装备到法国海军的新型Aquitaine级FREMM护卫舰上,已提议将Artemis以及Gatekeeper 系统装备到了法国海军的第二艘航母上[7]。
2.4.2 光学空间多路处理技术[8]
Artemis 红外搜索与跟踪系统采用了一种新颖的光学设计方法,即光学空间多路技术(如图8)。多路空间分割是由一个连续绕成像器瞄准线(LOS)转动的斜方镜(潜望镜)实现的。在潜望镜的输出处,由于潜望镜是光学固定式的,成像器的瞄准线和出瞳在一个圆上连续变换,对于无穷远处的物体没有像移。基于这个原理,成像器的瞄准线移至六个转向镜的前面,这些转向镜的作用是将成像器的视场确定到一个传感器视场的特定的扇区,位于中央位置的第七个扇区不必使用转向镜就能获取。在转向前瞄准线扫描过程中,当成像器的输出光瞳无遮蔽时进行每个作用扇区的图像采集。

图8 光学多路分割原理图
位于光学多路器前面的单个成像仪完成光学图像的生成,成像器将场景发出的红外辐射聚焦到像面上,并保证在一定的环境距离具有适当的图像清晰度。
2.5 以色列的Sea Spotter舰载凝视红外搜索与跟踪系统[9]
Sea Spotter 是以色列的拉斐尔(Rafael)装备开发局研制的一种的舰用凝视红外搜索与跟踪(IRST)系统,能够对已舰上方或者周围区域从水天线到天顶的水面和空中目标、超音速和慢速小目标进行探测,采用两个3μm~5μm InSb 红外凝视阵列传感器,利用图像处理算法分析目标运动并对探测的目标进行敌我判断,虚警率仅为每24h 内一次虚警。系统由两套传感器组件组成,每套传感器组件的重量为100kg,凝视覆盖范围为180°×20°,系统360°方位探测,俯仰范围为100°。该系统能够定位的目标包括地对地导弹、超音速和亚音速掠海导弹、战机、滑翔炸弹、反雷达导弹、直升机、舰船、小型目标如潜艇潜望镜或者喷气式滑行器等恐怖威胁。
Sea Spotter 的组成结构如图9 所示。系统由两套稳定凝视装置(SSU)组成。每套装置采用高分辨率中波红外(MWIR)传感器,覆盖180°的观察范围。由于主要的威胁是刚出现在水天线的低对比度点目标,亚像素级的稳定精度是一个重要的性能指标,SSU达到了优于瞬时视场(IFOV)亚像素级的稳定精度,可消除由舰船运动造成的目标拖尾,保持系统高分辨率的优势。双SSU 在舰上的安装灵活,只需要考虑瞄准线限制,腾出了舰船桅杆顶部宝贵的空间。
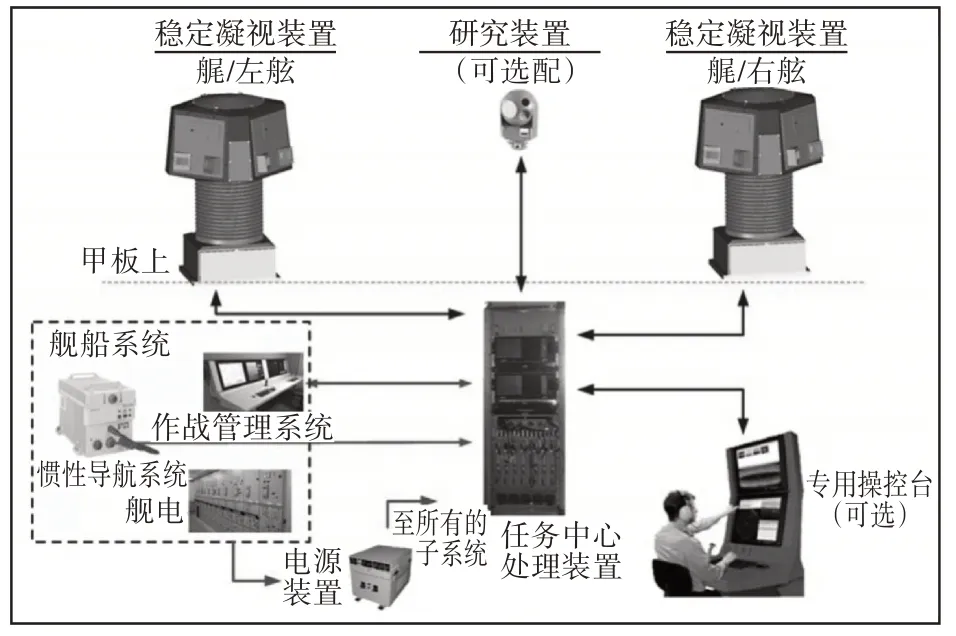
图9 “Sea Spotter”组成结构图(上)
两套SSU 提供的红外数字视频传送到任务中心处理装置(MCP)进行目标探测和跟踪,并将目标信息分配给舰载作战管理系统,同时也将全景视频输出和目标数据传送到操作控制台。Sea Spotter的操作员能够获取叠加了被跟踪目标信息的舰船环境360°全景显示。舰载惯性导航系统输出的数据用于将目标方向坐标相对于所有舰载系统通用的惯性参考系统坐标进行校准。
3 重点技术分析
以往的舰载IRST 都是主要用于对付掠海导弹威胁,随着舰载IRST 系统面临新的使命任务需求,尽管凝视技术具有更长的积分时间(达到毫秒级,而以往为微秒级),IRST 系统仍然要在探测距离和视场大小间进行权衡和折衷。新一代系统必须解决提高对弱小目标的探测距离、增大水天线附近的俯仰覆盖范围,同时还要兼顾红外探测器阵列数量带来的采购成本和全寿命周期费用方面的考虑,解决这些问题的主要途径是采用全凝视和步进凝视技术。
3.1 全凝视方案
全凝视配置带来的优点是结构简单,图像刷新率高,美、英、法等国已经将全凝视阵列技术应用到了各自的舰载红外搜索与跟踪项目中。经这些国家海军进行的系统分析表明,采用高稳定传感器和大口径光学系统的全凝视型舰载IRST 系统有望获得最佳的性能。但同时在海军舰载红外搜索与跟踪系统中采用凝视焦平面阵列技术也会遇到一个棘手的技术障碍,即与雷达和机载导弹逼近告警系统相比,舰载红外搜索与跟踪系统仅有分辨率这一个设计参数帮助处理器从杂波中辨别出威胁目标,因此必须很好地利用分辨率。对于给定探测单元尺寸的红外焦平面阵列而言,如果要以高角分辨率覆盖所需的区域,总的探测器的长度会很长。例如,如果空间分辨率φ为100μrad,探测单元尺寸ω为25μm,则探测器长度为2πω/φ=1.57m。因此,将凝视阵列技术运用于需要360°水平监视的红外搜索与跟踪系统中还需要采用广角观察技术,综合利用对称光学系统、切分视场光学系统、视线步进技术以及先进的光学设计。
美国海军研究办公室资助研制的基于分布孔径传感器的全凝视舰载红外搜索与跟踪系统就采用了三个5∶1 纵横比的中波红外焦平面阵列和2.56∶1纵横比的非对称光学系统,总的非对称比为1.28∶1,采用这样的方案达到对亚音速导弹的探测灵敏度。当然,如果要探测到刚超出水天线的弱小目标,需要增强俯仰方向上的分辨能力。
英国舰载凝视型IRST 演示器采用了切分视场光学系统来提供对水天线的全景监视,该技术有效地将覆盖舰船四周的水天线需要的焦平面探测器数量减少一半,但代价是增加了光学系统的复杂程度。而且,由于视场的光学叠加,很大一部分的FPA 像素会损失,事实上配准也是一个棘手的问题,特别是当温度变化较大的情况下。
法国的Artemis采用的了独特的光学空间多路技术这种全凝视理念,所以仅使用三个传感器就达到了全凝视高性能水平。
3.2 步进凝视方案
由于IRST 的成本与红外摄像机的使用数量、相关的光学系统以及处理所有视频信号所需的计算能力成正比,所以全凝视红外搜索与跟踪系统在实现高性能的同时也带来了过高的成本,因此对这些彼此冲突的变量进行折衷和权衡是极其重要的。如果要限制传感器的规格和数量来达到降低成本的目的,则每个成像传感器就必须覆盖一个较大的区域,这样势必会降低传感器的分辨率,除非采用某种形式的区域扫描技术,于是步进凝视技术也就应运而生。采用步进凝视技术的IRST 系统的缺点很难作为目标识别系统,而且“时分”扫描也降低了图像刷新率。
目前640×512 红外矩阵及其读出积分电路(ROIC)已能实现超过100Hz 速率的拍摄操作,但在IRST 应用中回访观察获取场景通常并不要求这样高的刷新率,如果采用某种形式的机构使成像传感器的瞄准线在水天线范围移动,达到360°覆盖范围需要的传感器的数量可大大降低。
尽管传统的常平架式系统凭借其惯性大的特点是实现稳定性的理想方案,但并不适于实现步进步进凝视工作方式,于是出现了使用需要复杂的固定式或移动式光学部件的“光学多路”技术。
为了更进一步地简化系统结构,还有一种方案就是将红外摄像机放置在一个安装在双常平架上的水平平台上。该伺服控制平台能完成与图像采集同步的步进运动。例如,法国的SAGEM 防御系统公司就采用了COTS 部件,其成像传感器对12°视场的刷新时间可以达到4s,这种图像刷新率非常适于操作员在非对称威胁对抗中进行目视操控,但对于空中目标的自动探测和跟踪,由于扫描之间存在较大的角运动,这种刷新率就过低了。
为了充分利用红外阵列摄像机的高帧频(通常为100Hz)实现全景扫描,采用了一种快速步进技术。例如在第二代线阵红外摄像机的经验基础上,法国SAGEM 防御公司研制的VAMPIR NG 舰载IRST 系统使用焦平面阵列致冷型3μm~5μm 红外摄像机,其小型扫描器采用了一些高质量的反射镜对瞄准线在传感器积分时间内的运动进行补偿,VAMPIR NG 系统的光学系统设计中采用了以下四个电动轴:
1)瞄准轴,承装红外摄像机和实现所有传感器光学元件的头部的全景扫描;
2)俯仰轴,当舰船存在横摇和纵摇运动时,支持俯仰反射镜将红外传感器的中心保持在一个恒定的俯仰角度上;
3)瞄准和俯仰扫描器轴系。
在图10 中,红外光透过外部窗口进入传感器头部。运动俯仰反射镜对其进行第一次反射,采用#1 折叠反射镜后,仅使用较小的俯仰反射镜就可实现较大的俯仰角范围。第一个透镜组形成了一个望远系统,可用于减小入瞳尺寸。#2 折叠反射镜优化了系统的紧凑型设计。接下来就是瞄准和俯仰扫描器,然后是红外摄像机的物镜。这些扫描器为传感器头的连续扫描提供了“消旋”作用。这种经改进的快速步进凝视方案是一种效费比较高的技术方案,能同时达到较高的分辨率和灵敏度,可以同时用于远距离小目标和非对称威胁的探测和识别。
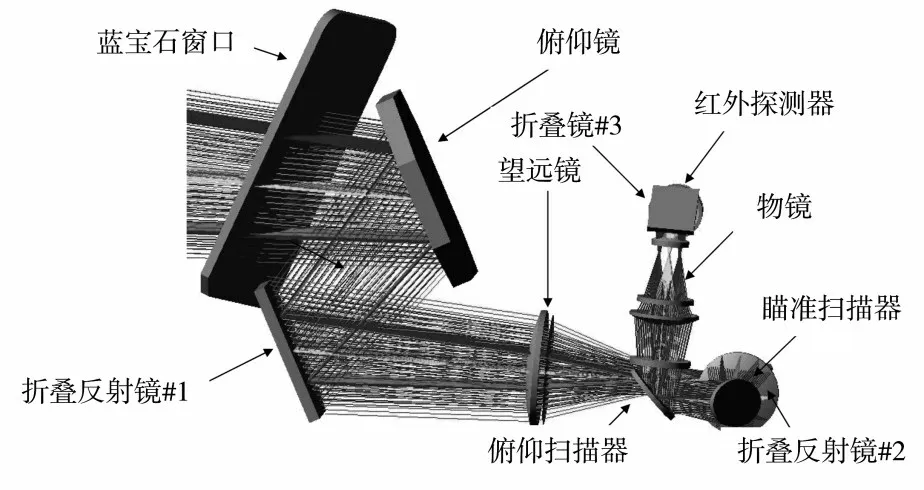
图10 法国VAMPIR NG系统光学设计
4 结语
现代海军使命任务的新需求和面临的新挑战给新一代的舰载红外搜索与跟踪系统带来了发展的契机,为此,美、英、法以及一些其它的欧洲国家海军都运用凝视舰载IRST 技术在逐渐取代采用线阵红外探测器和基于时间延迟积分的焦平面阵列与光机扫描体制的传统舰载红外搜索与跟踪系统,以实现高速率连续的全景警戒、宽俯仰角覆盖、高刷新率以及快速的航迹确认,近年来已陆续出现了一些新型的凝视红外搜索与跟踪系统的舰载装备应用,从中我们不难看出,这种新技术能为我们的装备研究工作增加一些新思路,以研制出适合我国军情新一代舰载红外搜索与跟踪系统来满足海军装备的需求。
