轮胎式自动化场桥箱区防碰撞保护系统的研究与应用
2023-08-29王勇
王勇
(天津港联盟国际集装箱码头有限公司,天津 300456)
随着绿色智能化港口的步伐加快,大多数传统码头都开始陆续加入自动化升级的队伍中。在传统码头自动化升级过程中,面临最多的则是轮胎式场桥(RTG)的自动化升级。RTG 自动化改造过程中,保证设备在自动化运行过程中的安全是极为重要的。为此则需要增加箱区防撞保护系统。箱区防撞保护系统包括小车方向和吊具起升方向的保护。
1 系统概述
1.1 小车防撞保护系统
在小车平台的前方和后方各安装1 个的激光扫描装置,实时扫描龙门吊堆场内集装箱或障碍物高度和轮廓信息。在小车运行时,小车前方和后方的激光扫描仪会实时扫描到行进方向箱区的高度信息和吊具的高度,当吊具的高度与箱区的高度差小于设定值(默认值1m),在小车方向吊具离高箱的距离小于一定的距离时(距离可自行设定)实现小车减速、停止、急停三级保护,从而防止碰撞事故。
1.2 吊具防撞保护系统
为了避免在自动或远程手动作业时,吊具在下降过程中砸到相邻列或者相邻贝的集装箱,在吊具上安装传感器进行保护,当吊具自动下降时,实时检测吊具与周围集装箱或者障碍物的距离,当系统检测到的距离小于设定的范围值后,场桥自动化控制系统停止吊具和小车的动作,并进行报警转人工处理。
2 测距传感器选择
本部分将从原理和码头作业环境等角度,选择防撞系统所用测距传感器的类型。常见的测距传感器有超声波测距传感器和激光测距传感器两种。
2.1 超声波测距传感器
超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。首先,超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为C=340m/s,根据计时器记录的时间T 秒,就可以计算出发射点距障碍物的距离L,即:L=C×T/2。这就是所谓的时间差测距法。
由于超声波也是一种声波,其声速C 与温度有关,在使用时,如果温度变化不大,则可认为声速是基本不变的。如果测距精度要求很高,则应通过温度补偿的方法加以校正。通过实际的测试,超声波测距的距离有限且超声波测距点的范围比较大,在实际生产作业中,集装箱堆场的箱缝一般在40cm 左右,超声波传感器很难在这种情况下应用。
2.2 单点激光传感器
按照实际考虑,可以装在吊具上用来做测距的激光传感器为单点激光传感器和小型单线激光扫描雷达。单点传感器一次只能测量一个点,即只有正对障碍物的时候才能测到吊具与障碍物之间的距离。四绳吊具下降过程中,由于本身机械结构的特点会产生扭动,使得单点传感器在晃动的过程中很容易被触发。故最终选择在吊具上安装单线激光扫描仪来实现吊具过程中的防撞保护。
2.3 单线激光扫描仪
单线激光扫描仪同时可以测量一个扫描面上的所有能扫描到的物体的距离。
2.3.1 扫描原理
激光扫描仪一般基于脉冲时间飞行原理(TOF),通过连续不停地发射激光脉冲,由旋转光学机构将激光脉冲按一定角度间隔(角度分辨率)发射向扫描角度内的各个方向而形成一个径向坐标为基准的二维扫描面。被测物体位置信息通过扫描仪到物体的距离及对应的角度数据给出相关示意图,如图1、2 所示。

图1 激光扫描仪的旋转光学机构
2.3.2 扫描关键参数
激光扫描系统的硬件关键因素有扫描距离、扫描角度、扫描频率、扫描精度等。
扫描距离是指激光扫描仪可以测量的最远距离,此参数在实际使用过程中受环境影响较大。主要影响因素有:目标物体表面反射率,目标物体形状,环境干扰等等;一般情况下,厂家会标明物体表面反射率为10%和90%情况下激光扫描仪的测量距离,如图2 所示。
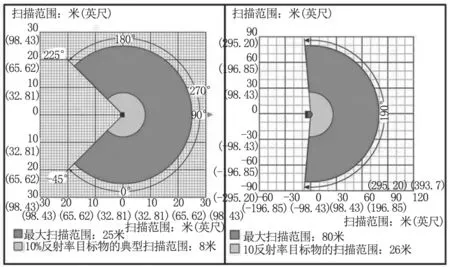
图2 扫描距离示意图
扫描角度是指即扫描仪能覆盖的角度范围,如图3所示。
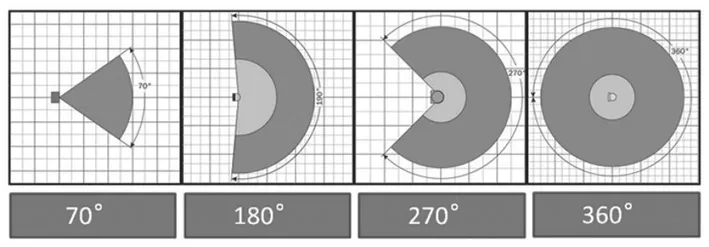
图3 扫描角度示意图
扫描频率是指激光扫描仪每秒钟扫描的次数,示意图如图4 所示。

图4 扫描频率示意图
扫描角度分辨率指两个相邻发射激光束之间的夹角,如图5 所示。
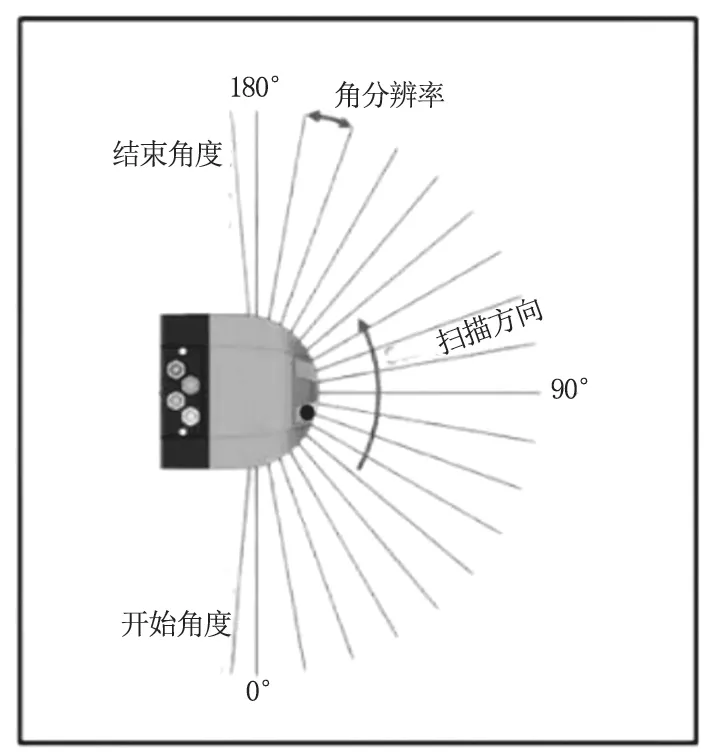
图5 扫描角度分辨率示意图
2.3.3 扫描精度
扫描精度分为两种表达方式:系统误差和统计误差。系统误差是指激光扫描仪多次测量的平均值与真值之间的误差;系统误差不能被完全消除,但可以通过预先的标定减小系统误差影响;统计误差是指激光扫描仪多次测量的均方差;统计误差可以采用多次测量取均值减小。
2.3.4 激光扫描仪在系统中的应用
在吊具四周安装单线激光扫描仪,激光射线垂直向下扫描,安装位置略大于集装箱宽度、长度,保证可以扫描到下方的信息。为了很好地起到防撞保护作用,可以将设置减速、停止、急停三级保护,选取一定的监测范围,分别对应的防护距离为D1、D2、D3,当该区域测距激光返回的最近结果D,当说明在吊具下方有障碍物,则触发减速,当D <D2 时,则说明进行停止保护,当D <D3 时则需要立即停止,否则,就会撞到旁边的集装箱上。
对于D1、D2、D3 距离的选择,需要根据吊具起升的加速度和最大速度以及负载的重量进行计算。速度和加速度的不同会导致距离的不同,具体的可以在场桥的机械图纸手册上找到。安全起见,当计算出D1、D2、D3距离后,需要吊具吊着水箱进行实际的测试。
3 影响防撞系统的因素
3.1 小车方向防撞保护的影响因素
当小车行驶到两侧后,由于RTG 两边的横梁会对小车方向的防撞起到保护作用,从而使小车不能正常地作业,因此,需要根据小车的位置,对保护的距离进行实时更新,当小车运行到横梁附近时,需要逐渐缩小保护范围,以保证设备的正常工作。
3.2 影响吊具下降防撞保护的因素
3.2.1 场桥自动定位的影响
首先,假设堆场内集装箱摆放整齐,箱缝距离也正常,则影响下降保护的因素有大车定位的精度、大车的纠偏精度、小车定位的精度、吊具的回零居中等。
自动化作业对大车的定位要求在±5cm 以内,当定位精度在这个范围内的时候,则吊具在正常下降的过程中传感器不会被触发,设备可以正常工作。如果大车定位的精度大于一定的范围且旁边贝位有集装箱,则在下降的过程中,激光扫描仪则很容易扫描到旁边贝位的集装箱,从而造成触发报警,而这种触发虽然起到了保护作用,但并不是我们希望看到的。故这种应用就需要将大车定位的精度按照要求做到±5cm 以内。
当大车的纠偏效果不好的时候,在吊具归零后,其相对于堆场的集装箱是斜着的,在吊具下降的过程中,激光扫描仪则很容易扫描到旁边列位的集装箱,从而造成误触发。同样,小车定位不准的时候,吊具会相对靠近旁边列的集装箱,在吊具下降的过程中,吊具上激光扫描仪则很容易扫描到旁边列位的集装箱,也会造成误触发。
3.2.2 堆场的影响
堆场中影响防撞的主要因素是箱缝之间的宽度和场地的平整度。当箱缝之间的距离过小时,吊具在下降的过程中,吊具上的激光扫描仪很容易扫描到旁边贝位或者列位的集装箱,从而造成保护触发,这种保护触发多了后,会影响正常的作业。场地的平整度不好的情况下,两侧的集装箱堆放高了会向两侧倾斜,吊具在下降的过程中,吊具上的激光扫描仪很容易扫描到旁边列位的集装箱,从而造成保护触发。这种保护触发多了后,也会影响正常的作业。
4 结语
本文从各测距传感器的原理出发,采用单线激光扫描仪组建箱区防碰撞保护系统并论述其组成、应用及影响因素,可充分保护RTG 自动化改造与作业。
