农药喷雾车远程数字化监控作业研究
2023-08-28蔺志鹏
蔺志鹏
(长安大学工程机械学院,陕西 西安 710000)
在农业生产的各个环节中,农药喷雾车作为重要的工具和设备,扮演着至关重要的角色。针对我国果树大面积种植现状,传统的农药喷雾车工作模式存在效率低、费时费力、药剂浪费严重等问题,对于提高农业生产效益来说非常不利,因此研究如何提高农药喷雾车的工作效率和质量具有重要意义。基于我国农业发展现况,大面积规模化农田占有率不断上升[1],亟需智能化农业装备来弥补传统机械的不足之处,实现对农作物的高效管理[2]。姜帆等利用RTK-GNSS 车载定位模块、Cortex A7 系列控制器实现了水田插秧机自动驾驶的功能[3];丁凡以拖拉机为研究对象,研究了其自动驾驶作业的转场和路径规划技术,提出了通用的路径规划方法[4]。以上研究可借鉴应用于智能农药喷雾车数字化作业系统中,该系统以STM32 和云平台服务器为核心,功能包括车辆作业位置信息采集、行驶轨迹的控制、车辆行驶状态的监测、作业参数的实时监测、数据的采集和发送、网络通信、数据的后台管理和对作业机械的远程控制,可实现农药喷雾车车载智能硬件设备与后端服务器的数据交换通信,为后期农业装备数字化、智能化提供参考依据,提高农业作业生产效率。
1 总体智能监控系统框架
农药喷雾车数字化智能监控系统由车载作业数据采集硬件设备和后端网络管理平台组成,农药喷雾车上的GPS 位置信息采集器和传感器可实现在田间行驶时路径的自动规划调节和作业过程中农药喷雾车剩余药量、作业面积、风速、行驶视频等作业数据的采集,4G 插卡路由器为数据传输提供网络服务,后台服务器管理平台进行数据处理,利用动态网页技术或者App 端对农药喷雾车的作业运行状态进行远程可视化监控。农药喷雾车智能监控系统拓扑结构如图1所示。
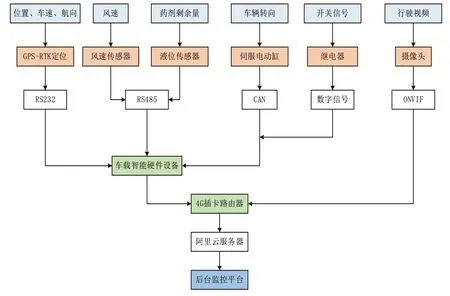
图1 农药喷雾车智能监控系统拓扑结构
2 车载智能硬件设备设计
为采集RS232 总线、RS485 总线、CAN 总线、数字信号等多种数据,笔者基于STM32F407 芯片设计了3 种串行数据接口和若干开关量控制接口。车载智能硬件由STM32F407 微处理器、ESP8266WiFi 模块、定位设备、继电器、传感器、伺服电动缸、网络摄像头、4G 插卡路由器组成,车载硬件设备如图2所示。
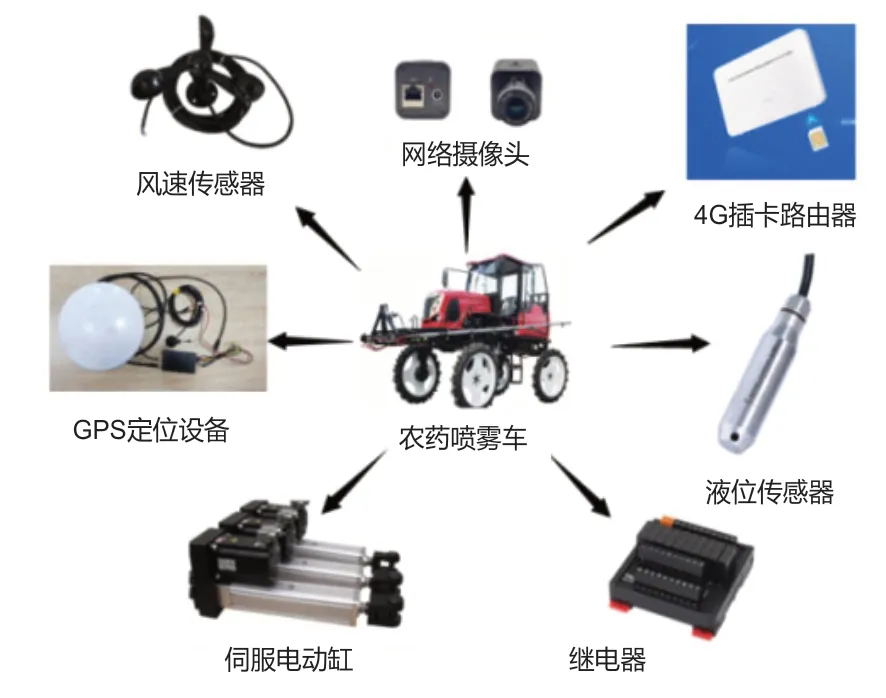
图2 车载硬件设备
作业位置信息监控和行驶轨迹控制采用GNSS(全球导航卫星系统)技术,车顶安装两套GPS 定位天线,且两个天线的位置处于车辆的竖直中心线上,GPS 接收器设置为高精度RTK 定位,固定解输出,输出NMEA 报文采用$AGRICA 数据格式,该报文包含车辆行驶的经纬度、速率、航向角等数据信息。服务器反馈给处理器的车辆方向控制数据经CAN 发送,由伺服电动缸的伸缩动作控制车辆的行驶方向;车辆的启停、倒退、速度挡位通过I/O 控制继电器的开关实现,共同配合控制车辆在农田的轨迹行驶[5]。
作业过程中的农药剩余量、作业环境风速、农药喷洒器设备的开关和喷洒流量大小的检测通过RS485 通信和I/O 口数字开关量来完成,微处理器对RS485 通信数据进行解析,将数据信息转化为农药剩余体积、风速数据信息;后台远程操控微处理器来控制农药喷洒开关和喷洒流量大小的开关[6]。
车载智能硬件设备中STM32F407 芯片的串口端口PA9(Tx)、PA10(Rx)与ESP8266WiFi 模块的串口Tx、Rx 相连接,4G 插卡路由器为数据采集设备和网络摄像头提供网络服务,后端平台可远程在线实时监控农药喷雾车的周围作业环境。车载智能数据处理设备如图3所示。
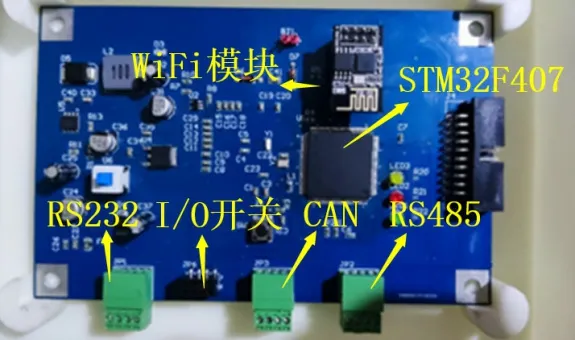
图3 车载智能数据处理设备
3 智能系统软件设计
数字化协同系统的软件系统主要由车载智能设备STM32F407 微控制器程序和后端服务器软件平台两部分构成。
STM32F407 微控制器程序主要调用内部的寄存器,有串口UART、CAN、GOIO、定时器TIMx、中断EXTI、DMA 传输等寄存器。RS232、RS485、UART、WiFi 模块通信的波特率统一设置为115 200,初始化串口发送和接收中断触发功能,数据流采用DMA 传输(直接存储区访问),不依赖于CPU 的控制独立完成,可以实现数据在外部寄存器和存储器之间的高速传输[7]。发送给服务器的数据在微控制器中打包成Http 数据协议格式,由WiFi 模块发送至服务器后端,同样服务器反馈给微控制器的数据以同样数据协议格式进行发送,数据经解析发送至串口发送寄存器和I/O 寄存器[8]。微控制器程序框架如图4所示。
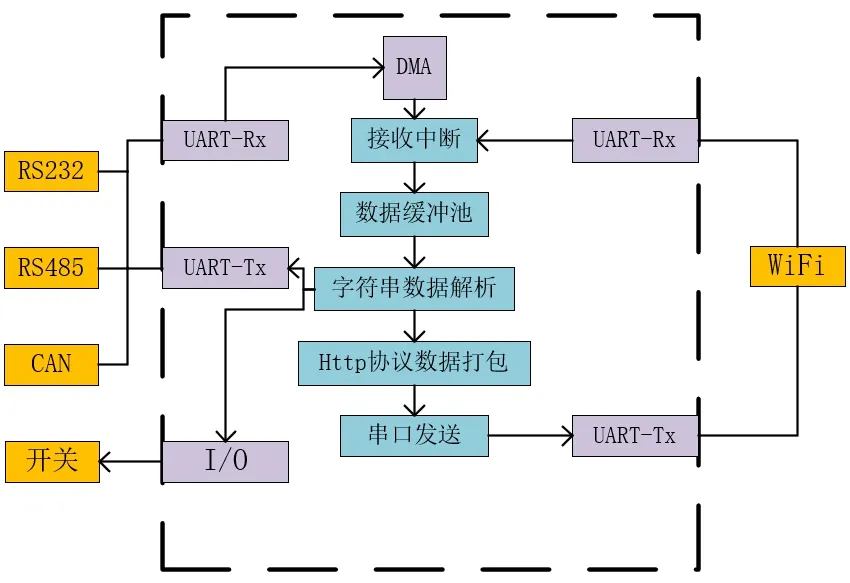
图4 微控制器程序框架
后端服务器平台搭建框架如图5 所示。智能系统服务器架构在阿里云服务器平台,功能包括农药喷雾车的车辆管理、农田作业面积管理、农药喷雾车速度控制、视频实时监控、农药剩余量监控、多车辆作业协同管理、轨迹规划等。智能系统基于B/S 架构,采用MVC 分层模式实现多车辆协同工作以及农药喷洒在线监控系统的开发。在MVC 支撑的分层模式下,结合路面压实质量后台管理的功能需求,按照自上往下的逻辑可以划分为四层:表现层、控制层、业务逻辑层和数据访问层[9]。其中,数据访问层通过访问数据库实现对车辆作业数据的增、删、改、查;业务逻辑层主要是对接收的数据进行处理运算,包括车辆行驶轨迹规划算法、作业面积计算算法、后端操作逻辑处理等;控制层主要是获取当前的动态操作、根据逻辑解析用户操作、执行操作并返回结果、调取作业视频;表现层通过手机App 和Web 端实现农药喷雾车机械协同作业信息监控和控制指令的输入。后端管理系统通过配置服务器通信所需的公网IP 和端口号,车载智能硬件设备采用TCP/IP 协议访问该服务器IP地址,最终数据进入到服务器进行解析[10]。

图5 后端服务器平台架构
4 结论
农药喷雾车多车辆作业数字化智能监控系统以STM32 单片机、后端服务器为设计核心,数据采集部分采用GPS 设备、风速传感器、液位传感器,作业视频监控采用网络摄像头,对车的行驶控制采用伺服电动缸和继电器,数据传输部分采用ESP8266WiFi 模块和4G 插卡路由器,后端服务器利用阿里云服务器,采用B/S 架构和SQL 数据库,数据经处理并实时控制农药喷雾车的行驶和作业状态。该系统性能稳定,开发成本较低,可实现多辆农药喷雾车在田间作业的实时可视化远程监控,减轻了人工劳动强度,提高了农作效率,为智能化农业装备的研发提供了依据。
