双边永磁同步直线电机随机模型系统辨识
2023-07-31俞建荣曹旺辉盛沙刘强刘学城
俞建荣,曹旺辉,盛沙,刘强,刘学城
(北京石油化工学院,精密电磁装备与先进测量技术研究所,北京 102617)
微发光二极管显示器(mini/micro light emitting diode display,Mini/Micro LED)作为新一代显示技术,具有超高解析度、无拼接缝隙、高发光密集度及快响应等优点,是继液晶显示屏(liquid crystal display,LCD)和有机发光显示器(organic light-emitting diode display,OLED)之后颇具活力的显示技术[1-2]。Mini/Micro LED显示屏量产化生产有许多制作环节,包括芯片制备、巨量转移、检测与修复等,其中芯片巨量转移是制约显示屏量产的技术瓶颈[3]。运动定位平台、视觉定位系统和芯片剥离系统是构成巨量转移工作台的三大部件,其中运动定位平台作为实现芯片从源基板到目标基板转移的重要部分,其运动执行机构分为“旋转电机+丝杠”和“直线电机+机械导轨”两类[4]。前者由旋转电机产生电磁转矩,经过传动机构转换成直线运动,但传动机构存在弹性变形、间隙和摩擦等不利因素,会引起高频重复定位精度差和动态响应慢等问题。后者由直线电机直接驱动,无需传动结构,具有高刚度、高加减速度、快响应、高定位精度等优点[5],能够满足芯片巨量转移中微米级点对点高频重复定位需求。
直线电机按照结构差异有扁平型(单边型和双边型)、圆筒型和圆盘型,根据工作原理又可分为交流感应直线电机、交流同步直线电机、直流直线电机和步进直线电机等[6]。其中交流同步直线电机中的双边型永磁同步直线电机(permanent magnet synchronous linear motor,PMSLM)具有高加速度、快动态响应、小推力波动等优势,能实现高带宽运动控制。但其易受温度、摩擦等因素的影响,运动中参数易发生变化,影响系统建模精度,不利于运动控制。因此如何精准建立PMSLM动态系统模型是保证PMSLM高性能运动控制的关键。
目前的动态系统建模可分为机理建模和实验建模两类,前者通过已知物理规律和参数推导得出系统模型(白箱模型),后者基于输入输出数据和相应的辨识方法获得模型参数(黑箱模型)[7]。PMSLM的系统辨识研究按照辨识参数可分为物理参数辨识和传递函数模型参数辨识。文献[8]采用改进粒子群算法对永磁同步电机的电阻、交直轴电感和永磁磁链的物理参数进行辨识研究,通过混沌变异小生境粒子群算法实现物理参数的精确辨识。文献[9]研究了一种新型自适应互联扩展卡尔曼观测器,建立了复杂的多参数互联耦合补偿辨识模型,实现了PMSLM高精度抗干扰在线多物理参数辨识。文献[10]针对噪声环境下分数阶系统建模问题,结合粒子群算法和递推辅助变量法完成整体辨识,并在电网络系统实例中得到验证。但受限于新辅助变量的构造,造成模型参数辨识精度低。文献[11]针对含有饱和特性的Hammerstein系统,将静态非线性环节和动态线性环节分开串联,通过递推算法利用双率采样数据辨识模型参数。文献[12]对于切换非线性系统,提出了基于神经网络的Hammerstein-Wiener模型,采用折息递推辨识算法辨识非线性子系统参数。然而对于切换规律难以确定的非线性系统,则存在系统参数辨识困难问题。文献[13]使用可分离最小二乘法结合带有非线性特性和随机扰动的Wiener Box-Jenkins模型,辨识出系统传递函数模型参数,并采用蒙特卡罗模拟验证了辨识算法的有效性。文献[14]针对PMSLM系统传递函数模型参数辨识问题,提出了辨识精度高于标准递推最小二乘法的辅助变量递推最小二乘法。但其对激励信号源、采样周期等试验条件要求苛刻,致使此类辨识算法没有在工程上得到应用。
为解决双边PMSLM传递函数模型参数动态变化、传统方法辨识精度低的问题,提出一种基于随机模型的系统辨识方法,分析运动过程中系统特性,确定传递函数模型的结构和阶次。针对系统可能存在的系统扰动,选择带有随机扰动项的Box-Jenkins模型,采用Levenberg Marquardt算法进行迭代优化,寻找最优模型参数。通过设计不同采样频率、不同注入电流幅值和不同电机运动速度条件下的系统辨识实验,分析参数辨识结果。最后对实验平台和输入信号的设计进行介绍和说明。
1 运动定位平台
1.1 运动定位平台结构及工作原理
运动定位平台玻璃板载晶平台结构示意图如图1所示,主要包括双边PMSLM(提供电磁推力)、两条机械导轨(作为支撑单元)、载晶平台(通过真空吸盘吸放LED芯片载晶玻璃板)以及气缸等气路元件,其中载晶平台和气路元件部分与无铁芯的直线电机动子相连接。当PMSLM通入控制电流时,与电机动子相连接的载晶平台按照控制指令做高频率两点之间的往复运动,实现LED芯片巨量转移过程中的重复定位功能。

图1 玻璃板载晶平台示意图Fig.1 Schematic diagram of glass plate loaded crystal platform
1.2 PMSLM数学模型
在推导PMSLM数学模型时,做如下假设:忽略磁饱和;不考虑初级铁芯涡流及磁滞损耗;初级与次级之间的气隙均匀;次级永磁磁场在气隙空间正弦分布;初级电枢绕组中的感应电动势为正弦波;初级绕组线圈均匀分布。运用磁场定向控制策略,建立dq轴坐标系,对电机的电流、电压作park变换,可得到电机dq轴电压方程和电磁推力方程为
(1)
式(1)中:id、iq和ud、uq分别为PMSLMdq轴电流和电压;R为电阻;Ld、Lq分别为dq轴的电感;ψPM为永磁磁链;pn为极对数;Fe为电磁推力;τ为磁极中心距;v为直线电机运动速度。
由于假设研究的永磁同步直线电机气隙均匀,则Lq=Ld,采用id=0的控制策略可得
(2)
式(2)中:Ke为反电势系数;Kf为电磁推力系数。
PMSLM运动方程为
(3)
式(3)中:m为PMSLM动子质量;Bv为摩擦系数;Fn为外部干扰力;FL为负载阻力。
1.3 系统传递函数模型
PMSLM通过控制器输出电流控制指令,作用于电机伺服驱动器,经滤波放大作用后,驱动载晶平台运动,并用光栅尺测量反馈电机的输出位移信号。将系统的外部扰动项视为扰动输入下的系统输出,则电流-位移为输入输出关系的系统传递函数框图如图2所示。

Ts为采样周期;K为电流增益系数;Ka为驱动放大系数;Kf为电磁推力系数;Ke为反电势系数;m为PMSLM动子质量;Bv为摩擦系数;R为电阻;iqc为PMSLM伺服驱动器电流输入;s为拉普拉斯算子;Ka为PMSLM驱动器放大系数;V为PMLSM的速度环速度输出;D为PMLSM的位置环位移输出图2 PMSLM系统传递函数框图Fig.2 Block diagram of PMSLM system transfer function
经过推导化简,电流-位移关系的输入输出系统传递函数表达式为

=KKaKf{s(Ts+1)[Lqms2+(Rm+
Kam+BvLq)s+(BvR+BvKa+
KfKe)]}-1+FΣ(s)
(4)
式(4)中:Ts为采样周期;K为电流增益系数;Ka为驱动放大系数;Kf为电磁推力系数;Ke为反电势系数;F∑(s)为系统扰动输入时的传递函数项。
采用离散系统模型参数辨识,需经双线性变换对传递函数进行离散化处理,如式(5)所示。
(5)
式(5)中:α1、α2、α3、α4、β0、β1、β2、β3、β4、σ(延迟因子)为所要辨识的离散系统模型参数。
2 系统辨识
2.1 Box-Jenkins模型
Box-Jenkins模型是带有随机扰动的确定性模型,将系统输入分为正常输入和扰动输入,即由系统输入输出确定性部分和随机扰动信号造成的不确定性部分组成。相比于应用广泛的ARX模型,其扰动输入传递函数更具有独立性,不依赖于系统的确定性阶次,通过将确定性模型和随机扰动相结合可得到模型结构示意图如图3所示。

v(t)为随机扰动输入;u(t)为正常输入;y(t)为含有噪声的输出图3 Box-Jenkins模型示意图Fig.3 Schematic diagram of the Box-Jenkins model
y(t)可表示为
(6)
式(6)中:B(z-1)、F(z-1)、C(z-1)和D(z-1)为基于离散移位算子z-1的多项式,其表达式为
(7)
式(7)中:nb、nf、nc、nd为根据先验知识选取的参数最大阶次,bnb、fnf、cnc和dnd为相应的B(z-1)、F(z-1)、C(z-1)和D(z-1)最大阶次的系数。
对于具有l个周期时滞系统,模型中分子项参数b0,b1,…,bl-1为零。
2.2 预报误差方法
Box-Jenkins模型的参数可用向量θ表示。
θ=[b0,b1,b2,…,bnb,f1,f2,…,fnf,
c1,c2,…,cnc,d1,d2,…,dnd]T
(8)

(9)

={1-[C(z-1)/D(z-1)]-1}v(t,θ)
(10)
将式(10)代入式(9)可得

(11)
模型预测误差e(t)可表示为

(12)
为量化每次迭代优化结果,定义平方差(mean square error,MSE)代价函数为
(13)

(14)
为确定系统的延迟因子σ,通过系统脉冲响应,测量输入电流的延迟时间(时滞周期),进而在离散系统辨识过程中直接输入系统的时滞周期nk。
2.3 Levenberg Marquardt迭代优化算法
由于系统中含有可能的延迟非线性特性,Levenberg Marquardt迭代优化算法通过每次迭代更新预测输出值的参数向量,解决非线性环节的影响。令θi表示为第i次迭代的参数向量估计值,其可以用式(15)进行迭代更新。
θi+1=θi+δi
(15)
式(15)中:δi是为保证VN(θi+1)≤VN(θi)而选择合适的方向和步长。
δi方向的获取基于对当前参数估计值θi的二阶泰勒展开,可表示为
(16)
式(16)中:雅可比矩阵J用来表示预测输出关于θ的一阶偏导数项;海森矩阵H为评价函数VN关于θ的二阶偏导数项。
对式(16)求关于δi的导数,并将其等于零,可得到使VN(θ)最小的δi值,其可表示为
δi=H-1JTe
(17)
使用Levenberg-Marquardt方法时,需保证得到可逆的近似海森矩阵H,可表示为
H=JTJ+ξjI
(18)
式(18)中:ξj用来控制步长和调节收敛;I为n×n的单位矩阵。
搜索方向给出为
δi=(JTJ+ξj)-1JTe
(19)
3 实验设计
3.1 实验平台介绍
采用的实验平台如图4所示,芯片巨量转移工作台的载晶平台采用LI4-S4型双边PMSLM驱动,其PMSLM电气及机械参数如表1所示。实验平台采用以色列高创公司的CDHD伺服驱动器输出电流控制信号驱动电机运动,运用德国RSF Elektronik公司的敞开式直线光栅尺(分辨率0.5 μm)测量反馈位置信号,使用Servo Studio软件编写辨识实验控制参数和辨识数据记录脚本。

表1 PMSLM电气及机械参数Table 1 PMSLM electrical and mechanical parameters
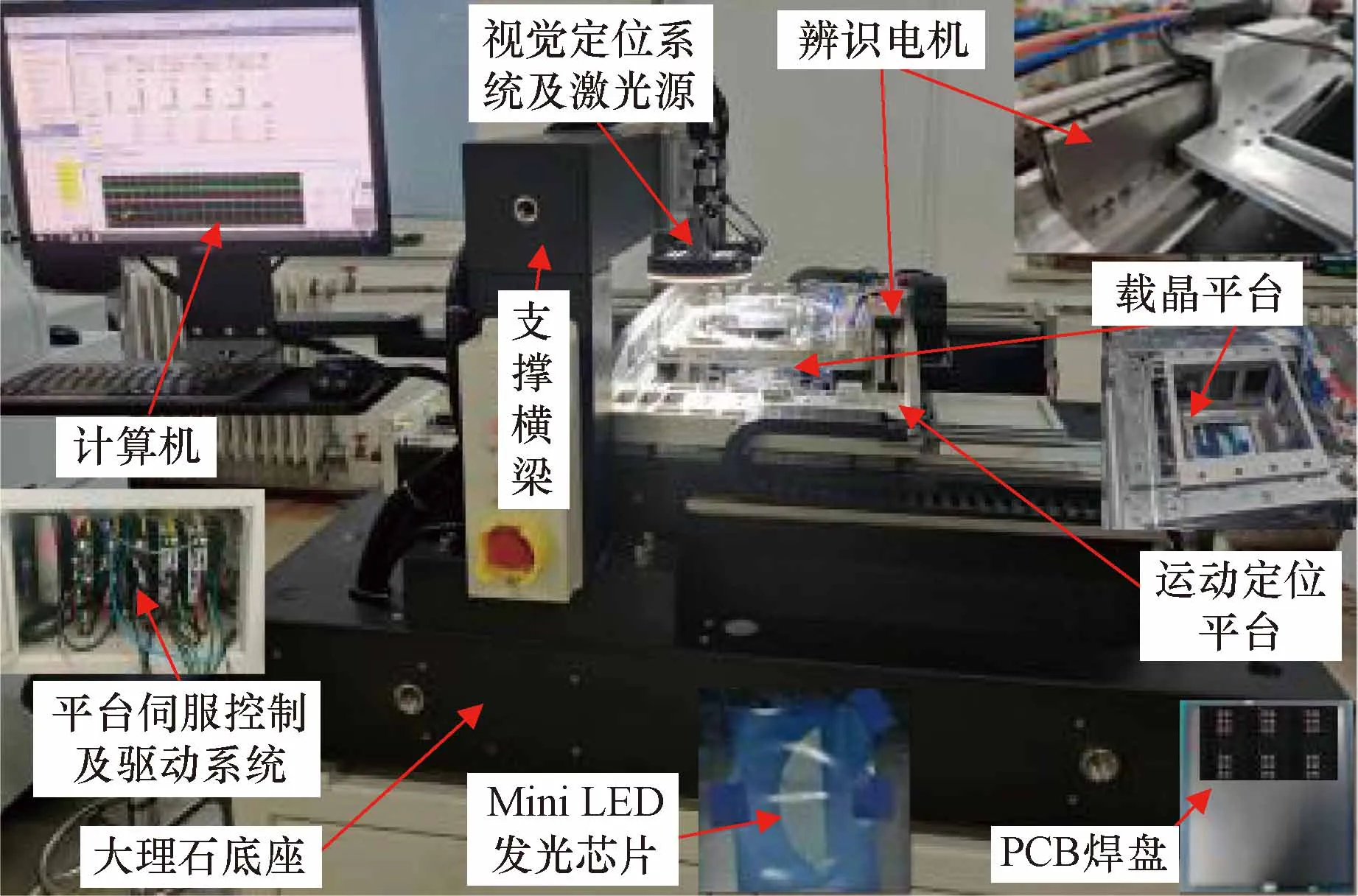
图4 电机辨识实验平台Fig.4 Motor identification experiment platform
3.2 输入输出数据采集与分析
通过机理分析选择模型结构和阶次后,发现输入信号是影响模型参数辨识精度的主要因素。由于逆M序列能够克服M序列中的直流成分,避免了对辨识对象的静扰动,且易于工程实现,因此选择逆M序列作为系统辨识实验电流输入类型,如图5所示。

图5 实验测试信号设计Fig.5 Design of experimental test signal
4 实验辨识结果与分析
采用迭代优化算法系统辨识时,输入输出数据较为敏感。通过设计多组不同采样频率、注入电流幅值和电机运动速度条件下的辨识实验,分析研究影响参数辨识的因素和规律,验证参数辨识方案的有效性。实验中采集双边PMSLM运动中的2 000组输入输出数据,前1 500组数据作为辨识训练数据,后500组数据作为验证数据。接着通过分析模型仿真输出、辨识误差、代价函数,达到优化辨识模型参数目的。
4.1 采样频率对辨识结果的影响
采样频率对辨识的影响主要在于对数据的采集和处理上,频率过低会丢失系统部分中高频率信息,而且频率过高又会采集到高频扰动噪声,不利于精确辨识模型参数。因此,设计多组不同采样频率条件下的辨识实验,分析其对辨识结果的影响。为了激发双边PMSLM系统响应,初步选择注入电流幅值为2.4 A,电机运动速度设为20 mm/s,输入输出数据采样频率为500 Hz、1 kHz、2 kHz、4 kHz。系统模型参数辨识结果如表2所示,表2中第一列为系统模型传递函数参数、模型匹配度和平方差。

表2 不同采样频率条件下的模型参数辨识结果Table 2 Model parameters identification results under different sampling frequency
通过表2和图6可以得出,当采样频率越来越大时,模型参数辨识的匹配度会有所不同。当采样频率为2 kHz时,采集的数据集中于相似的一段小运动行程中,会造成94.87%的高匹配度,但对于整个系统模型参数辨识而言不具有代表性。采样频率为1 000 Hz时,系统辨识匹配度为90.69%,相比4 kHz的81.04%相应提高了10.6%;当采样频率为500 Hz时,数据采集过程中会丢失500 Hz以上的有用信息,此时辨识不能还原真实系统特征。因此,为获得系统不同频率时的系统特性以提高辨识精度,选择1 000 Hz作为数据采集频率。

图6 不同采样频率条件下辨识结果Fig.6 Identification results under different sampling frequencies
4.2 注入电流幅值对辨识结果的影响
注入电流的大小影响着系统是否充分被激发,电流过低时,PMSLM驱动器能力弱;电流过高则存在过饱和现象。因此,已知PMSLM的持续电流Icon=3.536 A,选择0.5~0.75倍的Icon,对应应取1.7、1.9、2.0、2.1、2.3、2.5、2.7 A的注入电流进行分析,模型参数辨识结果如表3所示。

表3 不同注入电流幅值条件下的模型参数辨识结果Table 3 Model parameters identification results under different injection current amplitudes
不同注入电流幅值条件下的参数辨识值变化曲线如图7所示,通过分析发现,随着注入电流幅值的增加,模型参数辨识精度先增加再减小。在表3中当电流幅值为2.0 A时,模型的匹配度达到92.01%;MSE值随着电流幅值的增大也是先增大后减小,当电流幅值为1.7 A时,MSE为2.435×10-4,当电流幅值为2.0 A时,MSE为2.962×10-4。注入电流幅值太大时,会有额外损耗且会造成辨识过程高频振动,影响参数辨识精度;电流过低时,使得PMSLM驱动能力受限,无法完全激励系统特性。综合考虑,采用注入电流幅值为2.0 A时,适合作为辨识实验条件。

图7 不同注入电流幅值条件下的参数辨识值Fig.7 Parameters identification values under different injection current amplitudes
4.3 电机运动速度对辨识结果的影响
分析采样频率和注入电流幅值对辨识结果的影响之后,确定了采样频率为1 000 Hz,注入电流幅值为2.0 A。因此,为研究电机运动速度对模型参数辨识的影响,基于电机有效运动行程为200 mm,设定实验速度条件为20~50 mm/s,间隔为5 mm/s。对不同速度条件下的数据进行辨识,系统模型参数辨识结果如表4所示。

表4 不同运动速度条件下的模型参数辨识结果Table 4 Model parameters identification results under different motion speed conditions
表4中,随着PMSLM运动速度增加,在有效运动行程中,运动位移距离越大,采集的位移信息更丰富。但受限于实验平台行程,速度在20~50 mm/s的范围变化时,模型参数辨识精度先减小再增大,当运动速度为50 mm/s时,模型的匹配度达到为94.81%;MSE值随着运动速度增大而有增有减,速度为25 mm/s时,MSE为4.801×10-4,速度为50 mm/s时,MSE为7.84×10-4。考虑到模型匹配度作为衡量系统辨识的重要指标之一,在MSE值相差不大的情况下,选择50 mm/s作为辨识时PMSLM运动速度条件。
采样频率为1 000 Hz,注入电流幅值为2.0 A和电机运动速度为50 mm/s时,辨识仿真输出如图8(a)所示,辨识位移输出曲线与实验采集位移曲线拟合效果良好,模型匹配度为94.81%。辨识误差曲线(辨识位移值-实际输出位移值)如图8(b)所示,误差随时间的增加而存在波动,但误差值在-0.922~0.607 mm区间。辨识参数值与代价函数值随着迭代次数的变化曲线如图9、图10所示,经过20次Levenberg Marquardt算法计算之后,得到最优参数辨识结果如表5所示。

表5 最优参数辨识结果Table 5 Optimal parameter identification results

图8 最优辨识结果及误差曲线Fig.8 Optimal identification result and error curve

图9 参数迭代优化曲线Fig.9 Parameter iterative optimization curve

图10 代价函数迭代优化曲线Fig.10 Cost function iterative optimization curve
按照表5的辨识参数值,并结合式(7)可以将B(z-1)、F(z-1)、C(z-1)和D(z-1)分别写为
B(z)=0.020 3z-2+0.004 3z-3-0.001 7z-4
(20)
C(z)=1+0.227 7z-1
(21)
D(z)=1-1.000 2z-1
(22)
F(z)=1-1.452z-1+0.553 4z-2-
0.737 3z-3+0.636 3z-4
(23)
结合式(5)和式(6),带有随机模型的的双边PMSLM离散传递函数表达式为

(24)
5 结论
针对双边PMSLM传递函数模型参数辨识问题,提出了基于Box-Jenkins模型的系统模型参数辨识方法,采用Levenberg Marquardt算法进行迭代优化,寻找最优模型参数。按照最优输入信号设计选择合适的频率和幅值以充分激励系统。通过对比多组辨识实验得出:当采样频率为1 000 Hz,注入电流幅值为2.0 A和电机运动速度为50 mm/s时,辨识仿真输出匹配度为94.81%,MSE为7.84×10-4。最后介绍了实验平台和设计了电流输入信号,为工程实际应用提供指导借鉴。
