基于正演模拟的地下典型目标体探地雷达图像特征分析与评价
2023-07-31杨洁王云龙张雪甄占胜
杨洁,王云龙*,张雪,甄占胜
(1.石油石化污染物控制与处理国家重点实验室,北京 102206;2.北京师范大学水科学研究院,北京 100875;3.地下水污染控制与修复教育部工程研究中心,北京 100875;4.中国石油天然气股份有限公司辽河石化分公司,盘锦 124007)
随着探测技术的发展,探地雷达的应用范围越来越广[1-5]。20世纪80年代中后期,探地雷达逐步成为土壤污染原位探测,无损调查的主要方法,但探地雷达异常信息解译的依据和标准千差万别[6-11]。雷达波高频,波长短等特性使其易被介质吸收,当地下目标物非单一个体时,可能存在干扰信号,导致返回的波形图不够清晰[12]。由于在管线探测中雷达波和地震波的传播机制差别较大,以往基于地震波信息处理方法的雷达波解译模式的不足日渐明显[13]。目前,探地雷达资料解译准确性取决于探测人员的工作经验以及对多种地下目标体探地雷达图像特征和异常信号识别技术的掌握程度[14]。因此,系统地研究典型地下目标体的雷达图像反射波组特征,有利于提高探地雷达资料解释的精度,扩展探地雷达应用领域。
目前,学者常通过数值方法仿真模拟污染地中的典型目标体,搭建数值模型进行正演模拟,对地下目标体的雷达波长信号,图形特征进行解译,从理论上证实探地雷达在泄露污染探测中的适用性,具有一定的工程实用价值[15]。张鹏等[13]采用时域有限差分法(finite-difference time-domain,FDTD)正演模型分析管线材质、直径及埋设深度对图像的影响,同时得到了不同形状空洞的雷达图像并对其差异进行对比。梁小强等[16]自主开发探地雷达正演的FDTD程序,并探究管线埋深,间隔和材质等各种影响参数与雷达探测管线效果之间的响应关系。姚显春等[17]采用FDTD分别搭建金属管线和非金属管线的正演模型,探究不同介电常数的管线分界面波幅的特点及规律,并对地下管线材质种类进行区分。王莹莹等[18]将室内模拟和正演模拟的结果进行对比,分析出土壤中油饱和度不同情况下雷达图形的异常特征。刘传奇等[14]通过基于VS2010搭建模型提取轮廓实现准确识别污染物位置。杨菊等[19]利用计算机模拟不同泄漏情况下管道及其周围土壤的雷达回波,探究介电常数变化与雷达回波的响应关系。刘仁杰等[20]利用FDTD仿真软件验证基于曲线拟合的层状介质参数反演算法的预测精度。冯德山等[21]提出利用基于复频移完全匹配层的辛龙格库塔算法进一步提升正演模拟截断边界处的预测精度。李博等[22]基于哈希算法对正演模拟的地下管线图形进行智能分析,可有效地从探地雷达剖面中识别定位管线的空间分布及材质。
虽然近些年研究者用正演模拟的方法逐步推动探地雷达(ground penetrating radar,GPR)图像解译体系的构建,但中国对地下典型目标体的GPR正演模拟剖面图图形解译尚未形成规范的体系。本研究选用GPRmax2D软件,分别对水平层状介质、圆形管道、矩形目标体、局部含水层及石油污染物等地下典型目标体进行正演模拟并分析雷达图谱特征,进一步对探测中常见的多次反射波、绕射波等形成机理及识别特点进行解读,同时通过改变模型的参数,对比不同天线频率、目标体材料、土壤介质性质等因素对探测结果的影响,最后在污染场地验证探地雷达图形特征分析的准确性。本文通过探究地下典型目标体的图形成像规律,为实际雷达探测中图形信息解译提供一定的理论依据。
1 正演模拟原理和实验方案
1.1 GPRmax2D软件
借助GPRmax2D软件,模拟泄漏污染场中典型目标体的雷达反射波数据,并利用MATLAB软件对模拟结果进行处理和图像生成[23]。GPRmax2D软件的理论基础为FDTD[24]。FDTD是一种以差分原理为基础的数值方法,从概括电磁场普遍规律的Maxwell方程出发,用有限差分式代替方程中的微分式,将电磁场连续域内的问题转变为离散系统的问题,得到关于场分量的差分方程组,利用具有相同电参量的空间网格模拟被研究的模型,同时选取合适的场初始值和计算空间边界条件,来逐步求得此后各个时间空间电磁场的分布[25]。
1.2 水平层状目标体模型参数设定
水平层状介质正演模型长、高均为6 m,共分3层,上下两层模拟两层干土,中间夹体积含水量约为0.23的湿沙层(图1),各地层的厚度、电磁参数等如表1所示。本次正演模拟选用400 MHz频率的雷达天线,测量方式为剖面法,时窗长度设为200 ns,天线偏移距离为0.2 m,每次移动0.2 m,共包括26道。
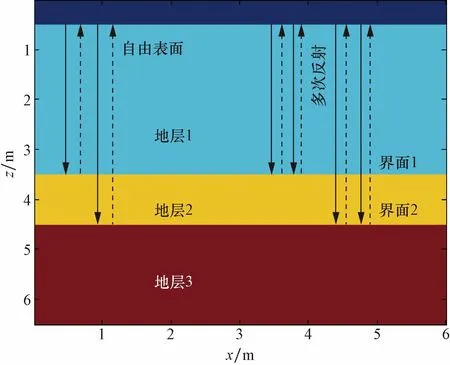
图1 水平层状目标体正演模型示意图Fig.1 Schematic diagram of the forward modeling model of the horizontal layered target volume

表1 层状模型参数Table 1 Layered model parameters
1.3 水平层状目标体模型参数设定
圆形目标体模型长8 m,高6 m,用于模拟干土介质中金属储油罐的目标体位于模型中心位置,中心点埋深为3 m,直径1 m,金属壁厚5 cm(图2),金属材料的电磁参数为GPRmax2D模型的默认值。雷达测线垂直于该目标体走向,采用剖面法进行探测,探地雷达天线频率选择300 MHz,时窗设为220 ns,共包括34道。

图2 圆形目标体正演模型示意图Fig.2 Schematic diagram of the forward modeling model of the circular target
1.4 矩形目标体模型参数设定
正演模型长6.0 m,高6.0 m,用于模拟干土中矩形空气空洞的矩形目标体长、高和上界面的埋深分别为2.0、1.0、1.50 m(图3)。矩形模型参数如表2所示。本次探测方式为剖面法,探地雷达天线频率选用300 MHz,时窗长度设为150 ns,天线偏移距为0.2 m,每次移动0.2 m,共包括26道。

表2 矩形模型参数Table 2 Parameters of rectangular model
1.5 地下管线模型参数设定
本研究建立高5 m,宽10 m的模型,将地层概化为单一的黏土地层,模型上层0.5 m为空气层,下部黏土地层厚4.5 m,用介电常数和电导率不同的圆形来代替地下管道及其中流体。在正演模拟的过程中将发射和接受天线均放置在土层上部0.02 m处,正演模拟的扫描方法采用共偏移距剖面法[26],天线偏移距为0.2 m,激励源选择Ricker子波,空间网格步长选择为Δx=Δy=0.01 m,采集时窗设置为100 ns。
1.5.1 不同埋设深度及天线频率的正演模拟
通过控制单一变量,比较不同频率天线对不同深度管线的探测能力,以便为实际探测中天线的选择提供参考。建立的数值模型管道厚度为0.05 m,管道的外直径为0.5 m,管道材料为金属,管道内载体为汽油。设置4根埋藏深度不同的管线,其深度分别为1、1.5、2、2.5 m(图4)。本模型黏土地层介电常数设为6,导电率设为0.01 S/m,并分别用频率为100、200、300、500 MHz频率的天线进行正演模拟。
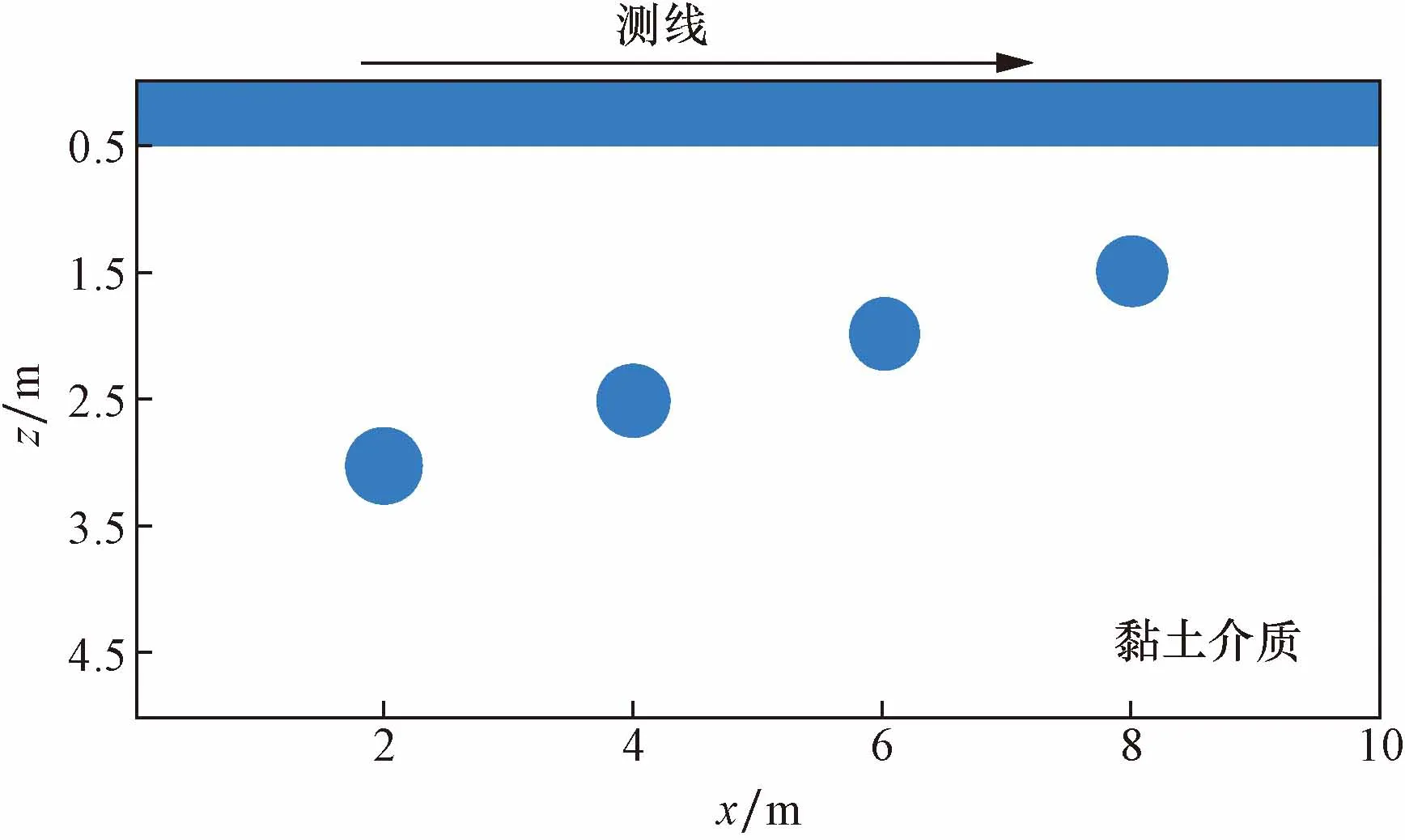
图4 地下管道正演模型示意图Fig.4 Schematic diagram of the forward modeling model of the underground pipeline
1.5.2 不同管线材料正演模拟
分别建立空气孔洞、PVC管线、金属管线,及充水状态下上述3种管线的模型(图5),来比较不同材质下探地雷达波的反射图像[27]。模型参数与图4中模型保持一致,其中将PVC材料的介电常数设为3,管线中心的埋深为1.5 m,分别设置100 MHz和300 MHz频率雷达天线进行模拟。

图5 不同材料管线正演模型示意图Fig.5 Schematic diagram of the forward modeling model of pipelines with different materials
1.6 局部含水层模型参数设定
模型由上层滞水、局部隔水层、包气带、潜水含水层及隔水层组成。模型长、高分别为20、5.5 m,分为3层(图6),各地层的厚度、地电参数等如表3所示。本次正演模选用400 MHz频率的雷达天线,测量方式为剖面法,时窗长度设为100 ns,天线偏移距离为0.2 m,每次移动0.2 m,共包括96道。

图6 局部含水层雷达正演模型示意图Fig.6 Schematic diagram of the radar forward model for local aquifers
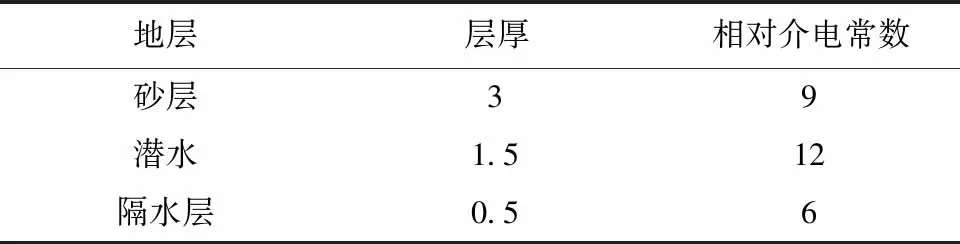
表3 局部含水层模型参数Table 3 Local aquifer model parameters
1.7 局部含水层模型参数设定
石油等轻质非水相流体(LNAPLs)被释放到地表后,由于重力的作用进入土壤[28]。当LNAPLs遇到含水单元后,在毛管边缘和饱和区顶部形成薄饼状层。当地下水流经含污染物的区域时,随着可溶解成分的溶解,逐步形成羽状LNAPLs带。LNAPLs进入地下后主要分为挥发相、残留相、自由相和溶解相[29]。污染土壤的介电常数随着土壤含水量和含油量的增加而增加,石油污染物本身介电常数较小,所以含水量是影响介电常数的主要因素[30]。虽然建立的模型越符合LNAPL扩散与赋存实际情况,模型越能反映GPR信号的响应特征[31],但由于含油量的影响相对较小,在实际场地中挥发相和溶解相含量相对较低,所以在利用GPRmax2D对石油污染物进行模拟时,对污染物模型进行简化,仅对残余相和自由相(油污核心)进行模拟。
建立了残留相和自由相两部分的概念模型,残留相中污染物浓度向两侧逐渐降低,随之介电常数也相应变小,限于软件无法设置渐变的模型,所以将残留相分为了内部高介电常数和周围介电常数较小的两部分。石油污染物迁移正演模型包括空气层,包气层和含水层,模型长4 m,地下水埋深1.5 m,模型中不同地质体的介电常数如表4所示[32]。
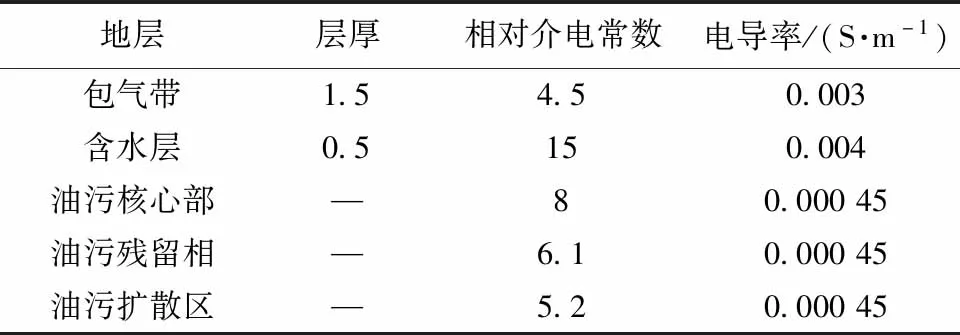
表4 石油污染物正演模拟模型介电常数Table 4 Dielectric constant of oil pollutant forward modeling model
石油污染物进入土壤12 h后的状态,污染物浓度下部高,上部逐渐降低,浓度最大的油污核心部分沉降在最底部,核心圆心深度约为0.5 m,并向四周扩散[图7(a)]。石油污染物进入地下96 h后的状态,油污到达地下水面,在地下水面污染物富集,整体上污染物浓度达到稳定状态,污染物浓度由下向上逐渐降低[图7(b)]。

图7 污染物不同迁移时间的正演模型示意图Fig.7 Schematic diagram of the forward modeling model for different migration times of pollutants
2 数据与分析
2.1 水平层状目标体模拟分析
水平层状目标体雷达正演模拟剖面图和波形图[图8]有从上到下共4条水平且按一定旅行时间周期性出现的反射轴。在其他条件不变的情况下,将模型中3个地层的电导率分别调大到0.001、0.02、0.01,获得的正演模拟剖面图如图8(a)所示。通过对比电导率变化前后的剖面图[图8(a)],可以观测到反射轴间隔与位置不变,但信号能量减弱,下方的反射波信号微弱甚至消失。反射轴信号间隔和位置未变表明电磁波进行反射的界面位置没有发生变化。

图8 水平层状介质雷达正演模拟剖面图和波形图Fig.8 Horizontal layered medium radar forward modeling simulation profile and waveform
在图1中,只有3个分界面,分别是空气和地面的分界面(自由表面),水平层状目标体上界面,水平层状目标体下界面。当水平层状目标体上下界面的反射波到达地面时,由于空气和地面的介电常数相差很大,自由表面便成为一个具有良好反射性的界面。当反射波能量足够时,有可能从自由表面反射并向下传播,到达地层间的分界面后,又被反射回地面,往复循环。其中,经过多于一次反射的波称为多次反射波。由于介质电导率越大,电磁波在介质中传播的衰减系数越大,反射波的能量越弱,图8(a)中下方的反射波不明显。因此,图8(a)中最上方的两条反射轴是水平层状目标体上下界面的反射波,下方剩余的反射轴是在水平层状目标体上下界面和自由界面之间反射形成的多次反射波。
采用共中心点法对上述地质模型进行模拟。模型的大小及地电参数保持不变,将模型地面中心点设为发射和接受两个天线的中心,偏移距离为0.2 m,每次各相向移动0.1 m。通过剖面法和中心点法对水平层状模型进行正演模拟,观察对应的雷达剖面图和波形图(图9)。本次正演模拟选用400 MHz频率的雷达天线,测量方式为剖面法,时窗长度设为200 ns,天线偏移距离为0.2 m,每次移动0.2 m,共包括26道。
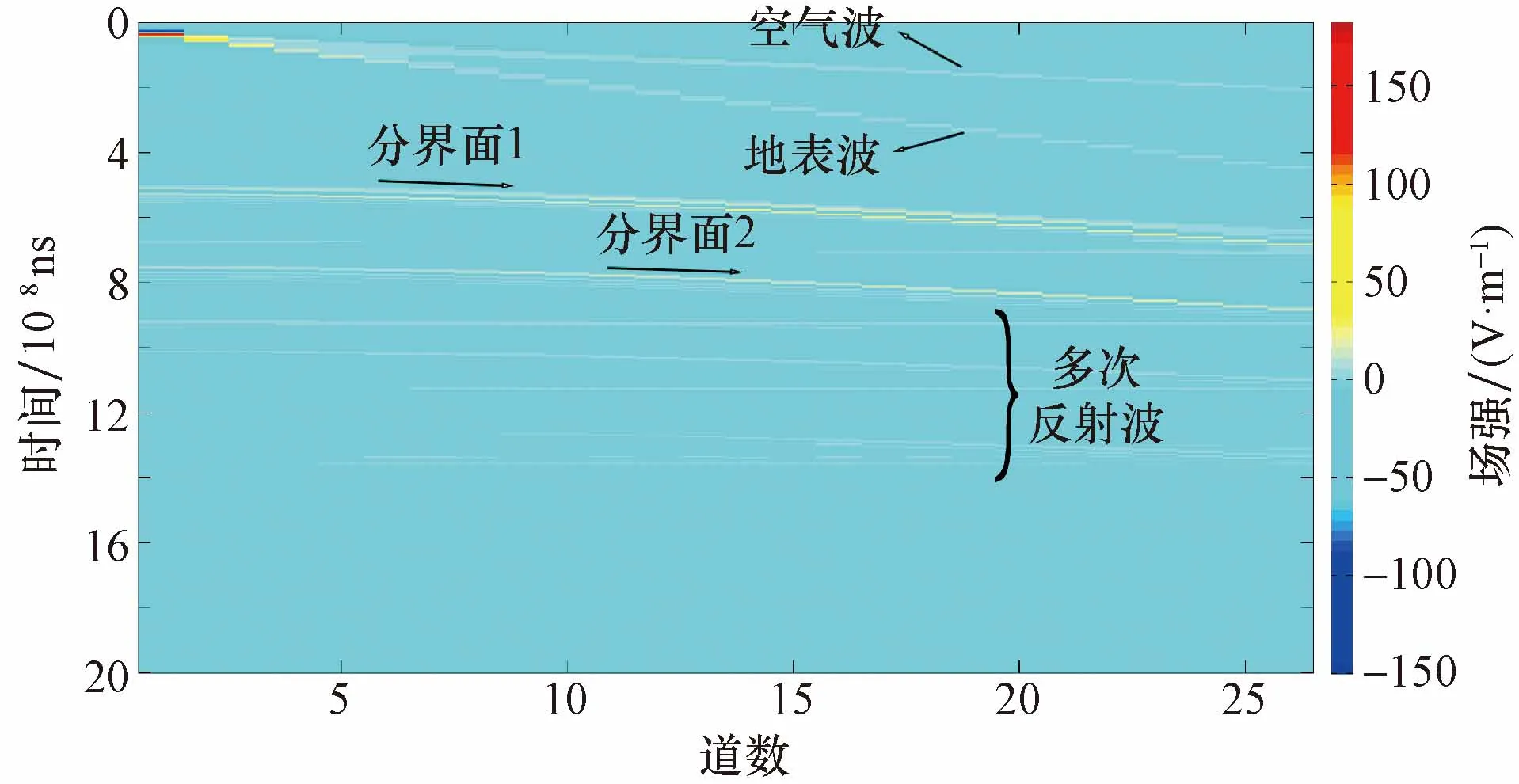
图9 中心点法探测正演模型剖面和波形图Fig.9 Profile and waveform of forward modeling model for detection by center point method
如图9所示,用共中心点法获得的水平层状介质二维雷达剖面图表现为倾斜的曲线状。沿着测线的正方向,曲线呈向下倾斜的趋势,倾斜度逐渐变缓,并且空气直达波和地面直达波逐渐分离。电磁波在介质中的传播速度v为
(1)
目标体到地表的距离d的计算公式为
(2)
式(2)中:t为反射电磁波的双程旅行时间;x为发射天线和接受天线间的偏移距离。
计算可得电磁波在地层1的传播速度约为0.122 m/ns,通过深度转换计算,图9中最上部的反射波对应的分界面在地面下3.06 m处,与模型设置分界面1的深度3 m相近,正演模拟预测的深度与真实值的相对误差为2%。同理可计算得出第2条反射波对应分界面2。第3条反射波与第4条反射波电磁波的旅行时间依次为第1、第2条反射波旅行时间的2倍,所以分别为界面1和界面2在自由面再次反射形成的多次反射波。
2.2 圆形目标体模拟分析
圆形地下金属储罐探地雷达正演模拟的剖面图及波形图(图10)中呈两条弧形曲线。根据电磁波传播的反射规律,得出圆形罐顶部距离模型表面的距离为2.33 m,与模型中圆形金属储罐的2.5 m埋深相近。正演模拟探测的深度与真实值之间的相对误差为6.8%。因此确定弧形1是金属罐顶层,弧形顶点对应圆形目标体的顶点。若目标体材料为非金属材质,则弧线2可推测为目标体底部的反射波。但该模型中目标体模拟金属储油罐,根据电磁波的性质,由于电磁波在金属表面会发生趋肤效应,电磁波无法穿透金属罐顶层到达底部[14]。弧形2位置电磁波的旅行时间是弧形1位置的2陪,符合多次反射波的规律。因此,弧形1是目标体顶部的反射波,弧形2为顶部反射波在自由面发生二次反射所得。

图10 圆形目标体正演模拟剖面和波形图Fig.10 Forward modeling profile and waveform of circular target
2.3 矩形目标体模拟分析
矩形目标体正演模拟剖面图(图11)与层状介质剖面图的形态有所不同,矩形空洞的波形表面水平,在角点处出现绕射现象。矩形空洞模型正演模拟的剖面图与圆形目标体的剖面图有相似之处,圆形目标体的反射波为双曲线状的弧线,而矩形目标体的弧线顶部变成了一个平直的反射面,假如将矩形顶部水平方向的长度逐渐减小,平直反射面变短,接近点状时,其剖面图将与圆形目标体的弧线反射轴相似[33]。

图11 矩形目标体正演模拟剖面和波形图Fig.11 The forward modeling profile and waveform of the rectangular target
图11中,反射波1平直部分,电磁波双程旅行时间为2.5 ns,经计算,该位置对应埋深为1.53 m,与模型中矩形顶部设置的实际埋深1.50 m之间的相对误差为2%,正演模拟的精度较高。同理计算得反射波2为矩形目标体的底部。在目标体顶、底部对应的反射波下还伴随多条多次反射波[34]。由于绕射波的存在,矩形目标体水平方向尺寸的确定存在一定困难,在实际工作中需要通过滤波和偏移对探地雷达采集的数据进行处理,以消除绕射波对解译结果的影响。
2.4 地下管道正演模拟分析
圆形管道雷达探测图谱(图12)为双曲线型。随着管线埋设深度的增加,得到的雷达反射信号越弱,双曲线的曲率逐渐变小[35]。模型中管道材料为金属,电磁波无法穿透,所以在剖面图中无管道下界面的反射波,模型中导电率设置较高,电磁波信号衰减快,所以图12中多次反射波信号微弱。

图12 不同天线频率不同埋深管线的正演模拟剖面图Fig.12 Cross-sectional view of forward modeling simulation of pipelines with different antenna frequencies and different buried depths
根据不同天线频率对同一地下管道的探测结果分析,其中300 MHz天线的探测效果最好,可以清晰地得到4根管线的反射图像,500 MHz天线虽然较其他小频率天线得到图谱的分辨率更高,但埋深为2.5 m管道的反射波形未能在图像中显示出。整体上,在100~500 MHz频率范围内,探地雷达的探测效果先随频率增大而变优,后随着频率增大而变差。究其原因,随着电磁波频率增大,波长变小,图像的分辨率逐渐增大。但当频率越高的电磁波在如土壤、水、金属等有损介质中传播时,频率越高,能量衰减越快,所能探测到的深度也就越低。
这下热闹了,有说自己老爸微信名叫“云水禅心”,是因为他喜欢听同名古筝曲;有说自己小姐妹的上司微信和小姐妹同名,叫“一米阳光”,气得她把自己微信昵称改成了“红尘多可笑”。
通过两种不同天线频率下不同材料管线图谱特征对比分析(图13),金属管线的反射波最明显,而无管壁的空心孔洞反射最不明显。该现象符合斯奈尔反射定律,当不同材料管线的介电常数存在差异[36],则不同管线与土壤的介电常数差值各不相同,两者之间的介电常数差值越大,对电磁波的反射越强烈[13]。由于金属和土壤的介电常数的相差最大,剖面图中反射界面最明显。

图13 不同管线的正演模拟剖面图Fig.13 Cross-sectional view of forward modeling simulation of different pipelines
通过图13中两幅剖面图的对比,天线频率变化对模拟结果的影响较小。仅在100 MHz天线的模拟结果中,PVC空管道位置上出现两根的垂向距离相差约5 ns双曲线[37]。研究认为,上方的曲线为管道上部反射所得,下方曲线为管道底部反射所得。其他位置均未获得管线底部的反射波是因为本模型将土壤介质的电导率设置了较高的值,电磁波的衰减较快,在充水管线中,得到电磁波对管道底部反射波的可能性更小。在两种天线的模拟结果中,在无管壁充水孔洞和充水PVC管道位置的垂向上出现2条甚至3条波形相似的双曲线,根据双曲线出现位置双程旅时的周期性,推测最上方双曲线为管道上部的一次反射波,下部双曲线均为管道顶部的多次反射波。
2.5 局部含水层正演模拟分析
上层滞水模型的探地雷达正演模拟剖面图(图14)含水层及隔水层的形态在剖面图中清晰可见,400 MHz天线在该模型中具有较高的分辨率。局部含水层介电常数及电导率均大于周围包气带,电磁波在上层滞水含水层中波速变小,衰减和吸收要大于包气带[38]。所以,在上层滞水正下方,潜水面反射波明显向下凹陷。在正演模拟中多次反射波较为明显。在实际探测中,需要根据多次反射波周期性出现的特征进行识别,及采用偏移法等对多次波进行消除。
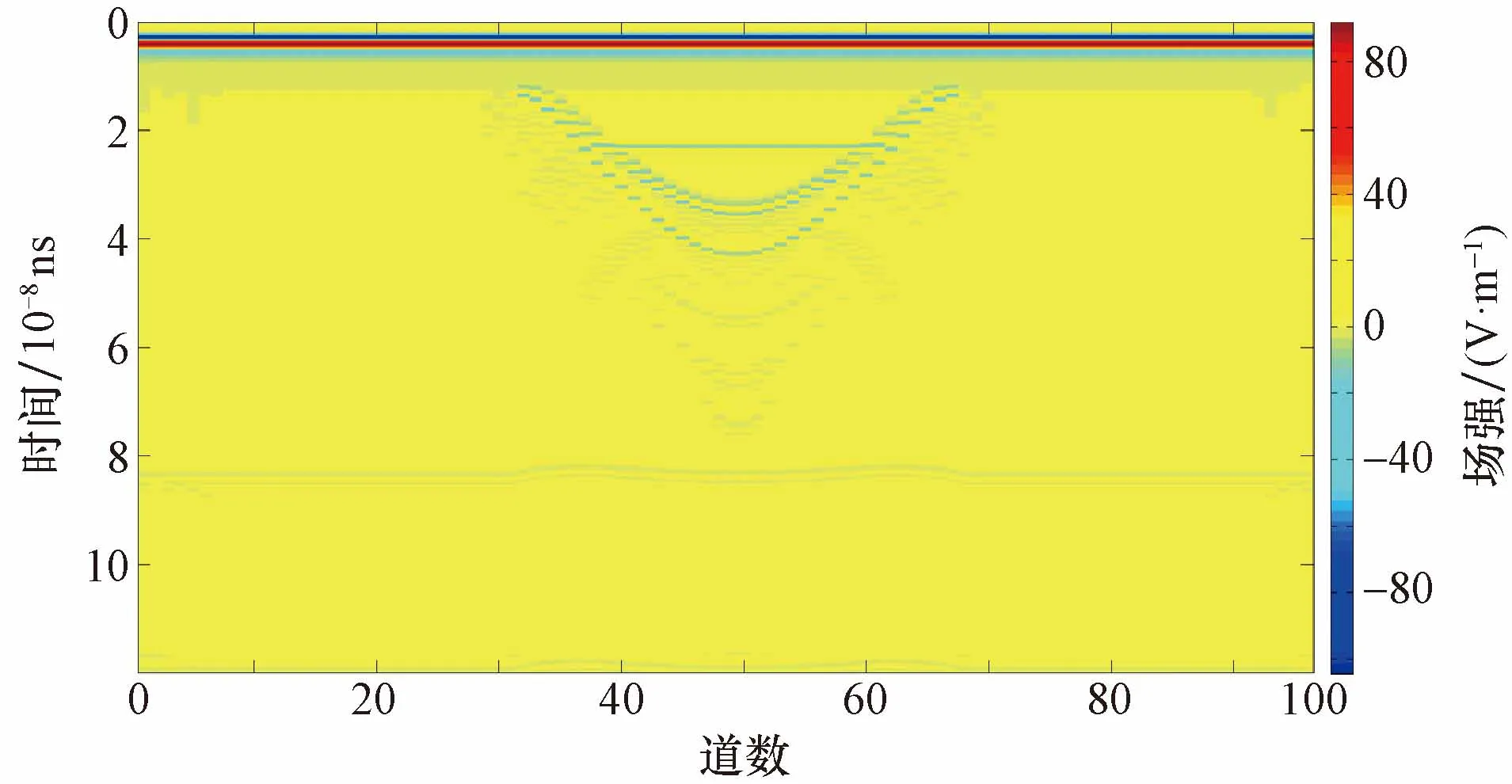
图14 局部含水层模型图Fig.14 Model diagram of local aquifer
2.6 石油烃污染物正演模拟分析
由于石油烃污染物正演模型在小范围内包含了形状、地电参数不同的多个目标体,所以雷达剖面图较复杂,存在杂波。石油污染物在进入土壤后迁移12 h后的正演模拟剖面图[图15(a)],接近地表的弧形1为污染区扩散边缘的反射弧,弧形2为污染物残留相上部的反射波,弧形3为污染物核心部分的反射波。石油污染物在进入土壤后迁移96 h后的正演模拟剖面图[图15(b)]中油污扩散边缘、污染物残留相及自由相分别对应弧形1、弧形2及弧形3。在雷达剖面图中地下水面反射波始终保持水平,线条清晰,特征明显,且下方存在多层反射波[39]。随着时间的推移,污染物位置下移,浓度逐渐降低,污染物扩散范围增大。在正演模拟剖面图中,反射波的清晰度随之降低,反射波对应的埋深逐步增加,反射波弧形长逐渐增长[40]。因此,基于FDTD原理的正演模拟可以有效地监测石油污染物范围,埋深,和迁移变化情况[12]。

图15 石油污染物迁移正演模拟剖面图Fig.15 Profile of forward modeling simulation of petroleum pollutant migration
3 典型污染场地案例分析
为了验证探底雷达正演模拟图形特征分析的准确性,选取北京市密云区某一废弃加油站作为研究区。据钻探资料显示,场地地表及地下水面附近检出较高总石油烃浓度。为探测场地地下管道、场地地层及石油污染物分布情况,利用SIR-4000探地雷达,采用纵横布线的方法,在可能的污染区域共布置3条测线。
测线1布置在汽油储罐区域,其探底雷达剖面图(图16)中出现4条清晰的双曲线反射弧。根据弧线曲率大小可以分为上下两组:第一组位于剖面图上部双曲线曲率较大,半径较小;第二组位于剖面图下部,曲率较小,但半径较大。曲率的大小可以反映出目标体的相对大小,第一组目标体小于第二组的目标体,表明地层下方存在两组不同大小的圆形目标体。图16中双曲线反射强烈,每组曲线均未捕捉到底部信号,对比对圆形目标体及金属管线的正演模拟,且电磁波在金属表面会发生趋肤效应导致波形图无底部型号。因此,图16中为典型的圆形金属目标体的雷达图像,弧线均为罐体和管线顶部的反射信号。据现场勘查可知,2个半径约1 m的汽油储罐埋于测线1地下1 m处,同时在2个储罐正上方0.5 m处,各存在一道半径约3 cm的金属管道,方向与储罐平行,弧线深度与实际管线及储罐的埋深相似,目标体种类与探地雷达剖面分析结果相同。

图16 测线1处探地雷达实测剖面图Fig.16 The waveform of ground penetrating radar measured at line 1
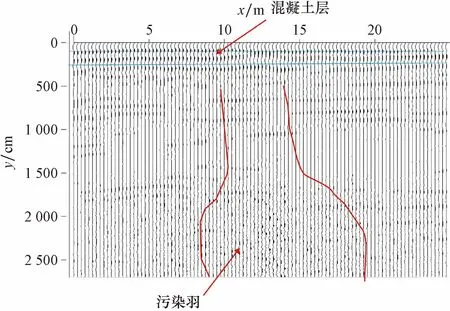
从测线2的剖面图(图17)可以看出,垂向上地下介质颗粒大小分层明显,土质的变化会导致地层中孔隙度及含水量的变化,从而引起土壤电磁参数的变化。电磁波在低含水量地层中传播时,能量衰减缓慢,波形振幅较弱,当地层含水量变大时,电磁波能量衰减加快,振幅变大,所以推测雷达图中各水平反射轴对应不同岩性的地层。不同土质的分界面会发生雷达波的反射。结合钻探揭露的场地岩性分布情况,及雷达反射波的旅行时长,可以看出各反射带对应的土质类型依次为混凝土层、粗砂层、粗砂含砾石层、卵砾夹层、砾石层、粗砂夹砾石层。

红色圈出区域为异常区域图17 测线2土层岩性及探底雷达实测剖面波形图Fig.17 Soil layer lithology and ground-penetrating radar measured profile waveform at line 2
测线2和测线3中,除了连续分布的地层反射界面,还捕捉到形似石油类物质污染羽的异常区,探底雷达剖面图(图17、图18)中红色圈出区域为异常区域,波形异常表现为反射增强,波峰放大,呈点状,强弱相间,范围变大的特征,说明介质的介电常数及电导率有所升高。根据钻孔资料显示,地下水面埋深约为24 m,异常区域主要分布在地下水面附近。汽油和柴油的介电常数要大于空气的介电常数,并且远小于水的介电常数。石油类污染物在土壤介质中进行迁移时,当其代替空气占据了未充水的介质孔隙,就会增大局部介质的介电常数,引起电磁波的反射;当石油类污染物到达地下水面,与水介电常数的巨大差异,也会使污染物的反射图像不同于地下水面的反射图像。在地下水流场中,反射波异常区域处于储油罐下游,均在污染羽的扩散方向上,推测异常区即为污染物分布区域。异常区显示,受污染地层具有一定厚度,分析原因为场地地层土壤颗粒及孔隙度较大,再加上污染泄漏已发生很长时间,污染物已迁移到达含水层,并在地下水面附近富集,由于本区域降水季节性变化明显,并且场地靠近潮白河,场地地下水与地表水联系密切,地下水水位波动大,驱动污染物在垂向上的扩展[41],导致污染物在垂向上的分布大。
红色圈出区域为异常区域图18 测线3处探底雷达实测剖面波形图Fig.18 The waveform of ground penetrating radar measured at line 3
4 结果与分析
通过正演模拟的方法,系统的总结6种典型地下目标体的反射波特征,并在污染场地验证目标体正演模拟图形特征的准确性。
在实际探测的雷达剖面图中,平行线和双曲线分别是层状介质和圆形目标体的基本特征。相比于水平层状目标体,矩形目标体反射波中间段水平,在角点处出现绕射现象,即雷达反射波在角点处出现弧度。在测定矩形空洞的水平长度,需先消除绕射波的干扰。相比于矩形目标体,圆形目标体的反射波整体为弧形,不存在中间水平的波形图。正演模拟对水平层状目标体和矩形目标体埋深探测误差均低于2%,非金属管线比金属管线的探测埋深精度更高[42]。
不同的土壤介质和目标埋深在探地雷达剖面图中呈现不同的探测效果。土层介质的变化会导致地层中孔隙度及含水量的变化,从而引起土壤电磁参数的变化,当场地地层岩性变化较大时,探地雷达剖面图可以清楚地探测到地层变化的分界面。随着天线频率的升高,波长变小,但在土壤介质中电磁波能量衰减增强,则探地雷达对地下管线探测效果清晰度变高,但探测深度变低。因此,天线频率和探测深度之间的平衡度是影响探测结果的重要一环。
不同材料管线的雷达剖面图具有各自图形特征。当管线与土壤介质的介电常数差别较大时,反射波越强,图形越清晰。通常金属管线的电磁波反射较强,塑料管线的反射波相对较弱[43]。由于金属介质的趋肤效应,使其不易产生介质底层界面的反射波,但常伴随多次反射波的现象[44]。可根据反射波的旅行时间倍数识别多次反射波。当在雷达剖面图的某一位置垂向出现多个雷达反射波时,可通过公式计算出每反射波的旅行时间,并分析各个反射波的旅行时间之间是否存在周期性关系。满足旅行时间周期性的反射波是同一反射界面形成的多次反射波,反之则不是同一界面的多次反射波[16]。
土壤中含水量和污染物浓度均会影响土层介电常数。由于局部含水层介电常数及电导率均大于周围包气带,电磁波在上层滞水含水层中衰减要大于包气带。在上层滞水正下方,雷达剖面图中潜水面会出现明显向下凹陷的现象。石油烃污染区域从上往下分别为油污扩散边缘、污染物残留相及自由相并且相应的介电常数依次增加,正演模拟的剖面图可清晰观测到各部分的反射波大小和空间分布,进一步计算可得污染物的埋深和相对大小[11]。
在物探工作中,基于时域有限差分法的正演模拟分析模型可用来探究多种地下物体的空间分布情况。水平层状目标体可用来模拟地下水面、断层、软弱夹层、破碎带等地质体。圆形模型可以用来模拟地下充水洞、地下管道、储罐、空气溶洞等地质体。矩形目标体模型或空气空洞模型常用来模拟隧道中衬砌脱空、不密实体、空洞充水等多种典型病害[45]。
在实际情况中,地面环境对探地雷达干扰较大且地下污染的分布情况繁杂,本研究内容覆盖面尚有不足,仍需各位学者共同构建探底雷达图形解译体系。
