便携式水下机器人系统设计与实现
2023-07-29汤奇荣崔国华
孙 栋,汤奇荣,李 江,崔国华
(1.上海工程技术大学 机械与汽车工程学院 智能协作机器人研究所,上海 201620;2.同济大学 机械与能源工程学院 机器人技术与多体系统实验室,上海 201804)
全球范围内,粮食消费需求的快速增长和陆地生态环境承载力不匹配的矛盾日益突出[1],急需全方位、多用途开发食物资源,以满足现在和未来的严峻挑战[2]。地球表面71%的面积都被水所覆盖,为人类的食物供给提供了巨大前景。《2022 世界渔业和水产养殖状况》报告指出,随着水产养殖业的显著增长,全球渔业和水产养殖产量创下历史新高,水产食品对保障21 世纪的粮食安全和营养做出了重要贡献[3]。但依靠人力的传统粗放式生产方式存在危险性高、代价昂贵、效率低下等问题,特别是在渔业环境检测和生物行为监视领域,需要大力推进渔业智能装备的科技创新,发展水下机器人技术[4]。
水下机器人是一种要求学科交叉性强、技术先进性高的综合系统,可以在部分渔业模式中发挥出很大优势。对此,大量国内外专家学者和机构对此做了深入研究。文献[5]为支持因东日本大地震而受损的渔业,开发了一台应用于清洁沉积物的水下机器人原型;文献[6]针对废弃渔具在无人控制的情况下,继续工作导致水生生物死亡的问题,提出了一种综合解决方案,并开发了一个带光学收发器的便携式AUV(autonomous underwater vehicle)。GLIDER项目通过使用3 台带有高性能传感器的水下机器人,对高产大陆架区的浮游动物进行持续声学监测,以便充分了解海洋中浮游生物和渔业产量的相关性[7]。国内在该领域起步较晚,但是经过科研人员的努力也取得了一定成果。中国水产科学研究院于2018 年对多个水下机器人系统进行研究和优化,并模拟水下环境对样机完成了耐压、运动等试验[8]。文献[9]设计了一款渔业养殖水下机器人,可以完成多项水质参数的检测任务。虽然现在已经出现了一些性能卓越的水下机器人,但是因为其高额的制造和使用成本无法广泛应用,而很难产生较高的经济价值。
本文结合近浅海水产养殖业中检测、预警等任务,设计开发了成本低廉、操作简单的便携式水下机器人。利用模块化可重构的设计思想,搭载不同的功能模块,可以使水下机器人具备实时监测水体环境质量、跟踪监视水生动物等多种不同的功能。该水下机器人的设计不仅为水产养殖业的自动化进程提供了新思路,且将会很大程度提高水产食品的产量和质量。
1 整体设计方案
考虑到应用场景和任务需求,将以模块化、可重构的思想来设计整体结构和布局,如图1 所示。
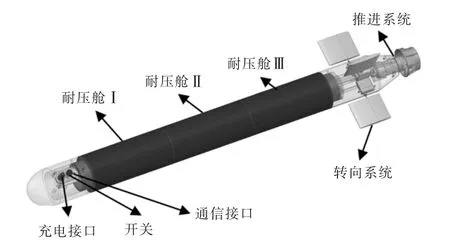
图1 便携式水下机器人系统构成Fig.1 System composition of portable underwater vehicle system
所设计便携式水下机器人应满足以下要求:①最大下潜深度大于50 m,支持深水域水产养殖;②整体质量小于25 kg,便于运输和布放,回收简单;③最大航速大于2 kn,操作灵活,保证工作效率;④产生的最大噪声小于60 dB,以免对水生生物造成惊扰,不便于近距离观察。
2 艇体外形与结构优化
2.1 机器人基本外形
本文选择Nystrom 型作为便携式水下机器人基本外形,从水动力分析结果可得,Nystrom 型包络体积大,且在水中航行时受到的阻力较小。进一步,利用基于拥挤距离的多目标粒子群优化算法进行优化设计[10]。具体地,在艇体外形优化模型中,水阻力和包络体积的倒数被定义为优化变量,艏艉段长度与水下机器人总长之比和艏艉部形状系数为设计变量。艇体外形优化结果如图2 所示。
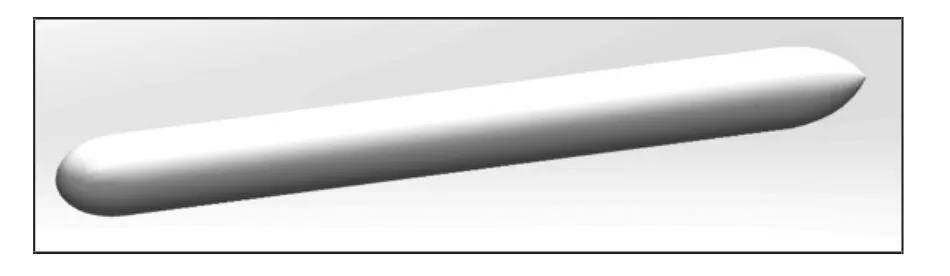
图2 水下机器人艇体外形优化结果Fig.2 Optimization results of hull shape of underwater vehicle
2.2 舱体设计与校核
考虑到便携式水下机器人的尺寸和结构特性,将艇体耐压舱直接作为控制舱壳体。如图3 所示,为方便实现重构,对耐压舱进行分段式设计,同时也将大大降低其加工难度。特别的,该方法可以搭载不等数量的舱段,并通过接入不同功能的传感器和负载设备,以满足不同环境下的多种任务需求。该机器人尺寸和结构简单,可通过单人单艇实现布防和回收。

图3 耐压舱体结构和组成Fig.3 Structure and composition of pressure tank
在选择耐压舱外壳材料时,不仅要计算水下静压力和随机浪流的不确定载荷,还要考虑加工工艺和成本。通过对常用材料的比强度、比刚度、弹性模量、屈服极限等数值的对比,决定采用铝合金6061作为耐压舱壳体材料。
为保证所设计便携式水下机器人可在水下正常工作,不发生强度破坏或屈曲失稳问题,对耐压舱体进行强度校核计算,可靠性计算公式为
式中:Ri为便携式水下机器人耐压舱壳体的外半径;Ro为内半径;P 为机器人在水下所受最大压力;σ 为铝合金6061 的屈服极限。
计算可得,所设计便携式水下机器人在最大潜深下,至少可承受1.1 倍静水压力。
为进一步保证其耐压性能,在理论计算的基础上,进行仿真验证。仿真结果如图4 所示,耐压舱壳体最大变形仅为0.0362 mm,位于中间部分,不会造成漏水或者内部元器件被挤压导致损坏;最大压强为47.4 MPa,远小于铝合金6061 的屈服极限,满足强度要求。

图4 耐压舱体结构和组成Fig.4 Structure and composition of pressure tank
2.3 动力执行机构布局与选择
为降低制造成本,减少航行过程中对水生生物的负面影响,整体采用对称结构,在艉部设置单推进器和4 个舵机作为动力执行机构,如图5 所示,以实现机器人进退、俯仰及偏航等位置和姿态调整。

图5 推进器与舵机分布Fig.5 Distribution of thrusters and steering gear
推进系统是水下机器人的主要动力来源,由电机、螺旋桨、导流罩等组成。电控部分安装在耐压舱内,电机通过橡胶垫片与艉部浮力材固定。另外,导流罩可使尾流最大程度地汇聚,屏蔽一定噪声和增强有效推力。
水下机器人在航行过程中通过调节水平舵和垂直舵的角度来实现俯仰和偏航控制,具体由同一平面的舵机经连接杆带动舵板同步转动实现。与推进系统类似,电控部分安装在耐压舱内,电机通过环氧树脂胶与艉部浮力材固定。
3 电控系统设计
3.1 功能架构
如图6 所示,机器人的电控系统按功能划分,可分为感知层、通信层、决策层、控制层和执行层。

图6 电控系统的功能划分Fig.6 Function division of electric control system
3.2 硬件设计
电控系统核心为STM32 系统,主要负责规划、计算、信息处理与存储等,其通过LoRa 无线模块,将从水下双目相机或侧扫声呐采集到的目标和环境信息传递给其它机器人系统或相应水下设备。IMU 和数字磁罗盘分别用以获取艇体3 个自由度方向的位移值和角度值。浸水传感器用以检测控制舱内是否发生漏水,一旦发生漏水,立即通过通信系统向上位机发出警报,防止造成损失。机器人在执行水质检测任务时,利用携带的温度传感器、pH传感器、溶解氧传感器等对水质信息进行采集,相关信息可暂时被存放在信息存储系统。
该控制系统框架简单,不需要搭载复杂、昂贵的电子元器件,通过与整艇结构相互配合,成本较于市面上已经量化生产的水下机器人约降低30%。
4 样机验证实验
完成便携式水下机器人设计、加工及装配后,对样机进行性能测试。
4.1 密封性测试
目前一般密封技术已经比较成熟,但由于材料选型、加工和装配误差、磨损腐蚀等多种情况的影响,水下机器人达到完全可靠的密封存在一定困难。
利用正压测试方法,通过水密接插件预留接口,向耐压舱内注入一定压力的气体,保持舱内气压为0.86 N/m2。50 min 后,舱内气压没有发生明显下降现象,可证明该耐压舱密封性能完好。
4.2 耐压性测试
为进一步验证耐压舱可靠性和静力分析的正确性,按照《超高压容器安全技术监察规程TSGR0002-2005》,模拟水下高压环境进行分段式实体测试。
便携式水下机器人舱体耐压性能的测试过程,如图7 所示。在保压阶段,压力表数值未有骤降的情况;测试结束后,耐压舱壳体未有变形或配合问题出现;将耐压舱体完全打开后,观察壳体内部和密封圈周围,未发现水渍;最后重复进行气密性测试实验,舱内气压未有发生明显下降现象。根据以上结果,可证明实验有效,耐压舱的耐压性能符合设计要求。

图7 舱体耐压性能测试过程Fig.7 Test process of pressure resistance of cabin
4.3 平衡性测试
为确保便携式水下机器人在静水中处于中心轴线平衡状态,要求其舱体和控制舱内各设备的重力与舱体所受浮力能够抵消,且对中心点力矩之和为0。由于设备总重量过大,出现浮力不足的情况,通过设置艏艉部浮力材结构进行补偿。
平衡性测试实验如图8 所示,通过静水测试情况可进一步完善浮力材的设计与布局方案,使控制舱在满负载的情况下能够保持平衡。
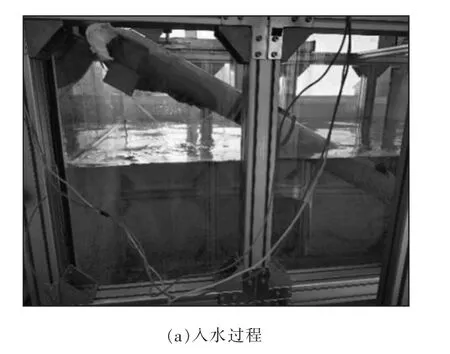
图8 便携式水下机器人平衡性测试实验Fig.8 Balance test experiment of portable underwater vehicle
5 鱼群监测视景展示
根据设计开发的水下机器人,通过半物理仿真与视景平台的二次集成,可以实时显示水产养殖场中鱼群的健康与成长状况。
本文基于Webots 仿真软件,自主搭建模拟鱼塘的虚拟世界,利用所设计水下机器人进行渔情观测、巡逻及监视作业仿真。具体地,等比例缩小20 m×20 m 的正方形鱼塘,水深为5 m,在鱼塘中对典型淡水鱼进行适当密度混养,列出了其中的部分鱼种,如图9 所示。

图9 鱼塘中的部分鱼种Fig.9 Some fish species in fish pond
在仿真平台中,通过完善物理引擎,搭建关于流体力学、涡轮噪声、动态碰撞等的物理模型。在仿鱼塘的虚拟世界中,置入多条不同种类的淡水鱼,并不间断随机游动。然后布置一台便携式水下机器人,通过设计基于指数趋近律的滑模变结构控制器,以解决该机器人非线性特点和水下不确定干扰的影响,提高作业的精度和效率。如图10 所示,该水下机器人通过携带的视觉系统获取鱼群状态,对养殖鱼进行实时监视。

图10 鱼塘虚拟环境Fig.10 Virtual environment of fish pond
通过仿真结果可得,所设计便携式水下机器人可较好地完成对鱼群的巡逻及监视任务,且容易融入水生物环境。该水下机器人可广泛应用于水产养殖业,对于推进渔业智能装备的科技创新有一定积极作用。
6 结语
本文针对当前水产养殖业中水质检测和水生物监视任务需要耗费大量人力物力的问题,设计了便携式水下机器人。基于模块化设计的思想,对于基本外形、耐压舱体、动力执行机构进行了一系列的设计与优化;同时完成了以STM32 为核心的电控系统设计,包括控制逻辑框架及具体硬件选择。相比较现有的水下机器人,所设计便携式水下机器人具有制造和使用成本低、方便维修、操作简单和机动性强等优势,可满足现代化渔业的全水域实时信息采集需求。最终在完成所研制水下机器人的安全性和运动性能验证的基础上,基于Webots 搭建了仿鱼塘的虚拟世界,对鱼群巡逻、监视任务过程进行了视景展示。
