切削加工过程中颤振在线监测研究综述
2023-07-29李益文邓朝晖刘涛卓荣锦李重阳吕黎曙
李益文,邓朝晖,刘涛,卓荣锦,李重阳,吕黎曙
1.湖南科技大学 机电工程学院,湘潭 411201
2.华侨大学 制造工程研究院,厦门 361021
3.湖南科技大学 难加工材料高效精密加工湖南省重点实验室,湘潭 411201
近年来,航空航天装备朝着大型化、轻量化和精密化方向发展,其工业产品中的低刚性结构件(薄壁件、细长轴等)和低刚性工艺系统结构件(深孔、窄槽等)被广泛运用[1]。由于此类结构件在切削加工过程中极易发生颤振[2-5],而颤振是切削加工系统在非周期性外部激振力的连续作用下产生的一种强烈自激振动,受其时变特性和系统结构复杂性的影响难以得到控制[6],严重影响了工业产品的加工质量和加工效率,于是对切削加工过程中的颤振监测变得至关重要。传统的离线检测方法需要停机,导致了效率低和无法实时反馈机床加工状态信息等问题[7],因此对切削加工颤振在线监测技术开展研究势在必行。
颤振在线监测,即在充分利用计算机网络技术、传感器技术和数据采集技术的基础上,将加工过程的数据实时传输到监测中心的计算机中进行处理,以实现机床状态的在线识别,将极大地提升工业生产效率[8]。颤振在线监测主要包括颤振数据采集、在线特征提取以及颤振识别三大任务,然而目前颤振在线监测的工业运用仍不成熟,主要存在以下问题尚未解决:①数据采集受机床系统差异、传感器性能以及信号的选择与融合等因素的制约;②颤振特征的手动选择、自动提取以及有机融合仍缺乏良好的理论支撑;③现有的颤振识别算法只能针对特定情况,通用且鲁棒的颤振识别模型暂不具备。
改译:During the Yongzheng reign,the nine-peach design was commonly seen on the famille-rose ware such as globular vases,olive-shaped vases and plates that are decorated with branches that extend from the outside into the bowl.
如何有效解决上述问题,以实现机床的高效、高质量加工,是颤振在线监测技术真正应用于工程实际的关键。为此,对颤振在线监测的三大任务的研究现状进行深入归纳与分析,可为未来颤振在线监测的研究方向和技术突破提供指导。
1 颤振数据采集技术
颤振在线监测的第一要务须完成机床加工状态信息的采集,目前已有的数据采集形式主要有[9]:①外接传感器数据采集;②基于可编程逻辑控制器(Programmable Logic Controller,PLC)数据采集;③机床通讯接口数据采集。
思维能力的训练和思维品质的提升是历史课教学的一项重要任务,教师应在课堂教学的各个环节中有意识地渗透历史思维训练,寻找适当的教学策略,激发并维持学生的思维动力,发挥学生的潜能,让学生在具体的情境体验中感悟历史,经历真实的思维过程,完成有效的思维活动,交流思维成果,进而提升思维品质。
机床在加工过程中会产生各种形式的物理信号,究其原因是动态切削力所导致。动态切削力会使得系统的振动频率、电机电流发生相应变化,因此通过附加相应传感器可检测力、加速度、声发射、电流、功率等信号[10-14]。另外,振动频率的变化会产生相应的声音信号,利用麦克风传感器同样可完成数据采集[12,15-17]。采用单一传感器进行数据采集会存在特征漏检的现象,而不同的信号具备不同的特性,将各单一传感器进行合理组合以实现多传感融合,可减少信号间的冗余和干扰产生的影响,获得更加精确的颤振监测结果[16-17]。
表4 总结了常用于颤振识别的各类有监督学习算法的优缺点和应用情况。目前有监督颤振识别技术凭借其高精度、高鲁棒性等特点仍然是大多学者的首选,但有监督学习严重依赖样本标签,无法真正实现智能化颤振在线监测。
相较于前二者数据采集方法,机床通讯接口采集方式在数据采集和传输方面优势更明显,其数据采集方式主要有[25]:基于RS232 串口采集[26]、基于DNC 接口采集[27]和基于OPC 规范和网络接口采集[28-29];其中RS-232 串口采集适用于短距离信号实时传输。DNC 接口采集可实现机床内部信息的实时采集和远程控制,但存在受机床系统限制的问题。基于OPC 规范和网络接口数据采集方式在基于专业的软硬件条件下,可实时采集大多数机床内部信息。然而通讯接口采集通常会受到机床封闭性的影响,开放式数控系统接口采集则可通过外部调用函数,实现外部系统与数控机床的联网和信息读写,打破了设备之间的信息交互壁垒[30],为实现数据平台集成化以及颤振在线监测与抑制协同运作创造了条件。胡磊[31]采用开放式数控系统接口采集方式实现了切削加工数据的共享,并进一步提高了切削加工过程中的稳定性。单蒋楠[32]通过该采集方式完成了颤振数据采集和状态监测,并对二者进行了实时性评估。
表1 总结了上述颤振数据采集方法及优缺点,其中开放式数控系统基于高性能计算机软硬件平台,将成为未来机床系统的发展趋势[33],因此基于该系统的通信接口采集方式将成为未来数据采集的重要发展方向。

表1 颤振数据采集方法的优缺点及应用总结Table 1 Summary of advantages,disadvantages and application of chatter data acquisition method
2 颤振特征提取技术
振动信号采集完成后,需对数据进行特征提取以获取关键颤振特征。而特征和特征提取技术的选择是影响颤振监测效率的关键,目前主要通过时域分析、频域分析及时频域分析法来实现。
2.1 时域分析方法
时域分析以时间为自变量描述信号变化过程,时域特征提取是通过时域分析法对采集的原始信号进行各种直观分析,以获取相应时域特征的方法[34]。时域特征主要分为有量纲和无量纲指标,笔者对该两类颤振指标近10 年的使用频率进行统计,如图1 和图2 所示。由于各类特征拥有不同的敏感性和稳定性,选择合适的特征可为在线颤振监测提供更高的精确性。
2012年11月2日百雀羚以7 000万元拿下2013年《中国好声音》第二标王,与两亿元冠名好声音的加多宝凉茶共同上演了本土品牌力压国际大牌的惊人一幕。在随后的“双11”上同样表现惊人——截至下午15:00左右百雀羚天猫旗舰店当天销售额达到1 500多万元,昭示着这个中国老字号化妆品百雀羚已经实现浴火重生凤凰涅槃。
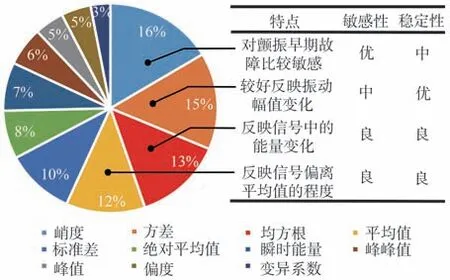
图1 有量纲指标使用频率饼状图Fig.1 Pie chart of dimensional indexes usage frequency

图2 无量纲指标使用频率饼状图Fig.2 Pie chart of non-dimensional indexes usage frequency
在有量纲指标中,峭度使用频率较高,Liu等[35]根据峭度值与信号幅值之间强相关性的特点,实现了车削颤振识别。Liu 等[36]采用快速谱峭度图解决了低信噪比信号无法确定颤振位置的问题。Wang 等[37]利用峭度概率密度函数完成了对振动信号冲击特性的评估。由于单个指标并不能同时兼顾良好的敏感性和稳定性,峭度往往与平均值、方差或均方根结合使用[38-40]。该3 种特征稳定性良好,Schmitz 等[41]将方差作为颤振指标,并建立了方差与铣削稳定性的相关性关系。谢锋云[42]将模态函数的均方根作为输入,通过神经网络模型实现颤振在线监测。Ye 等[43]将信号中的每一段均方根值组成均方根序列,通过快速变异系数(Coefficient of Variation,CV)算法提取均方根序列的CV 值作为颤振特征,从而提升了颤振监测效率。针对不同的使用场合,将不同特征组合使用,可取得更佳的颤振监测效果,王民等[44]利用了频段能量百分比计算均值和方差的方法,使得磨削颤振监测具备了更高的计算效率。Chen 等[45]利用峰值灵敏度高以及标准差较好的稳定性的特点,实现了96%的颤振监测准确率。
信号表征中,有量纲指标敏感性较好,而无量纲指标在稳定性上则更胜一筹,因此通常将两类指标结合使用。Lamraoui 等[46]选择了方差、峭度、峰值因子以及脉冲因子等9 个特征,利用相对熵对特征进行排序再优选,提升了颤振识别的精确性与鲁棒性。由于颤振产生的本质是能量变化所引起,能量熵可表征信号能量分布的不确定度,因而被广大学者采用[47-52]。各熵特征优势的差异会获得不同的监测效果,如Ji 等[53]利用功率谱熵可反映信号的频率特征的特点,开发了铣削颤振监测系统。Nair 等[54]根据排列熵(Permutation Entropy,PE)具有计算效率高、抗噪能力强等特点,实现了系统动态变化的有效检测。PE 只能从单一尺度表征故障信息,任静波等[13]则采用多尺度排列熵(Multi-scale Permutation Entropy,MPE)有效辨识了铣削颤振状态,该特征可兼顾PE 的优势,同时能从不同尺度解读颤振信息。在此基础上,Li 等[55]采用MPE 和多尺度功率谱熵(Multi-scale Power Spectral Entropy,MPSE),增强了颤振在线监测的鲁棒性。
时域分析方法凭借其直观、简单及预定参数少等特点被广大学者所采用,但该方法存在下列问题[56]:①所测原始信号易受实际工况干扰从而导致分析偏差;②难以反映信号所蕴含的全部信息,不易准确掌握信号的本质构成,易使得颤振监测精确性下降。此外时域分析中的颤振特征选择仍然是经验的,缺乏较好的理论指导。
2.2 频域分析方法
3)聚合经验模态分解法
Cuka 等[57]将信号通过Babor 滤波器组分解为重要的频率分量后,利用Teager-Kaiser 能量算子(Teager-Kaiser Energy Operator,TKEO)追踪瞬时频率和振幅变化,可高效、准确地识别切削加工的稳定性,提高了颤振识别的精确性。为克服TKEO 易受到噪声干扰的问题,汪晓珊[58]和Dong[59]等采用Vold-Kalman 滤波器(Vold-Kalman Filter,VKF)提取各个信号分量,同时利用基于频谱集中系数的瞬时颤振频率估计方法,提高了颤振识别的鲁棒性。Chen 等[60]采用了一种自适应总体最小二乘–旋转矢量不变技术(Total Least Squares-Estimation of Signal Pa‐rameters via Rotational Invariance Techniques,TLS-ESPRIT)进行颤振频率分量谱估计,开发了一种由信号预处理、颤振频率估计和颤振检测组成的在线颤振监测系统,可自适应确定颤振谐波个数,并具有良好的抗干扰性,如图3所示。

图3 基于TLS-ESPRIT 在线颤振监测流程图Fig.3 Flow chart of online chatter monitoring based on TLS-ESPRIT
上述两种算法尽管有较强的抗噪能力,但存在设置参数较多以及计算复杂度偏高等问题,Liu 等[61]提出的一种基于频域搜索(Frequency Domain Search,FDS)的铣削颤振识别算法则具有计算简便、实时性良好等特点,该算法在特征提取前不需要较多复杂信号进行信号处理,可直接提取颤振频率进行机床颤振识别。Wang 等[62]将颤振频率构造成稀疏字典矩阵,再利用正交匹配追踪(Orthogonal Matching Pursuit,OMP)算法进行颤振频率提取,缩短了信号重构时间。然而OMP 算法仍需预先设置稀疏度,针对该问题,窦慧晶等[63]提出了一种改进稀疏度自适应匹配追踪算法,通过对步长大小进行自适应调整,从而高效逼近信源稀疏度。颤振频率会受到加工条件和机床动态特性变化的影响,从而出现颤振频移现象,Liu 等[64]采用归一化谱熵和对数谱距离两种指标解决了该问题。
为提高神经网络模型颤振在线识别精确性,Abul 等[12]采用多种深度学习框架,建立了基于深度神经网络(Deep Neural Network,DNN)的颤振监测系统。Tran[98]和Sener[99]等均提出了基于深度卷积神经网络(Deep Convolutional Neural Network,DCNN)和WT 的颤振识别架构,文献[99]将切削参数与连续小波结合使用,使得DNN 拥有更好的分类性能。此外,有部分学者[100-102]结合弹性反向传播算法、磁细菌优化算法及遗传算法等,提高了人工神经网络(Artifi‐cial Neural Network,ANN)及DNN 的全局搜索能力以及迭代效率,提高了在线颤振识别的实时性。由于颤振的发生是短暂的,难以获得有效的颤振数据样本,利用神经网络进行颤振监测的优势并不十分显著。

表2 颤振频率提取相关算法总结Table 2 Summary of relevant algorithms for chatter frequency extraction
2.3 时频域分析
颤振在线监测的关键在于对早期颤振信号的实时、准确监测,而颤振早期冲击能量微弱,信号易被噪声淹没,仅靠时域和频域分析方法,难以准确判断颤振的产生,而时频域分析能从时间和频率两个方面同时解读信号中包含的信息,可提高其分析精度。几种常用的时频域信号处理方法如下所述。
1)小波变换法
政治参与理论自然是依据我国的法律以及实际发展情况而形成的,指导我国公民进行政治生活也是遵照“依法参与”的原则,公民的政治参与需要以法律为基础,为自己一切政治活动的准绳,以此来科学、合理地进行政治生活的参与,其称之为合法参与。
短时傅里叶变换(Short Time Fourier Trans‐form,STFT)通过加入固定窗函数的方式完成局部信号的频谱分析[65-66],但同时会导致自适应性的缺乏以及非平稳信号处理效果不佳等问题[67]。小波变换(Wavelet Transform,WT)法则通过设置时间窗和频率窗宽窄的方式,可实现对高频和低频信号的分析[68],适合探测信号中的瞬态反常现象及易被忽略的信号特征,实现了STFT 优缺点的继承与弥补。Wang 和Liang[69]提出了可适用于不同工艺的小波变换模量颤振指标,并采用小波变换模极大值(Wavelet Transform Modu‐lus Maxima,WTMM)检测信号中的奇异点和瞬态现象。Yuan 等[70]提出了一种基于小波相干函数的颤振检测方法,该方法在颤振早期的信号分析中表现良好。然而WT 仅对低频信号分解效果显著,小波包变换(Wavelet Packet Trans‐form,WPT)则解决了传统WT 对高频信号分解存在分辨率差的问题。Yao 等[71]和Tao 等[49]采用WPT 处理信号中的高低频成分,利用局部离群因子(Local Outlier Factor,LOF)和PE 特征分别实现了铣削和钻削颤振实时监测,图4 为基于RWPEE 与LOF 的颤振识别方法。

图4 基于RWPEE 与LOF 的颤振识别方法Fig.4 Method of chatter identification based on RWPEE and LOF
2)经验模态分解法
WPT 的特征提取受基函数、分解层数等因素的影响,限制了颤振监测效率。经验模态分解(Empirical Mode Decomposition,EMD)法则无需参数设置,便可将信号自适应地分解为多个固有模态函数(Intrinsic Mode Function,IMF),并使振动信号的时频变化规律充分体现,弥补了WT 和STFT 在分析非平稳信号时的不足。有部分学者[35,72-73]利用EMD 在车削和铣削加工中完成了对加速度和电流信号的分解,并实现了颤振的在线监测与早期识别。另外Shrivastava 和Singh[74]利用EMD 良好的噪声处理能力,从而建立了刀具颤振与加工参数的相关性关系,为切削加工预测出稳定的加工区域提供了策略。
由于切削加工过程通常所采集的信号并不是纯白噪声,因此EMD 处理信号时会存在部分时间尺度丢失的问题,从而产生模态混叠,使得IMF 分量失去了分解的物理意义。为此Liu 等[75]提出了EMD 与WPT 相结合的方式用于在线颤振特征提取,其中EMD 对信号进行分解,WPT对第一次重构信号进行处理。
频域分析可将频率域内的原始信号分解为几种简单信号的叠加,并完成信号中敏感频率成分的识别和分离,弥补了时域分析的不足。当颤振发生时,信号的主频会向加工系统的固有频率频段转移,而频域分析可筛选出加工频率以及颤振频率频带内的信号,据此,通过频域分析提取颤振频率的方式可实现颤振监测。
聚合经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)法可通过抵消信号中的白噪声的方式,显著改善模态混叠[76]。Fu等[77]以及Shrivastava 和Singh[78]均通过实验比较了EMD 和 EEMD 两种信号处理技术的适用性,由于EEMD 可极大地增强IMF 的窄带特性,因此可显著缓解模态混叠,如图5 所示;文献[77]通过基于EEMD 和能量聚合特征的Hilbert-Huang变换实现了颤振前兆信息的有效检测。由于信号中的白噪声无法完全抵消,残余白噪声仍会影响分析结果,Shrivastava 和Singh[79]则采用了Teager 滤波器对经EEMD 分解后的IMF 进行处理,清除了IMF 中残留的噪声污染。

图5 EMD 与EEMD 的信号处理对比[77]Fig.5 Signal processing comparison between EMD and EEMD[77]
但是,EEMD 在抑制模态混叠时,还存在较大缺陷[80]:①信号中所添加的白噪声幅值须选择合适,较小或较大的幅值分别会造成模态混叠抑制效果差以及计算量急增的问题;②信号分解时会出现非标准IMF 的可能以及模态分裂问题。
4)局部均值分解法
为缓解EMD 和EEMD 中运算效率低及模态混叠等问题,Smith[81]介绍了一种通过除法运算获取乘积函数(Product Function,PF),以使迭代次数大大减少的方法—局部均值分解(Lo‐cal Mean Decomposition,LMD)法。LMD 可用来解调调幅和调频信号,能自适应地将信号分解成一系列PF,并且PF 的瞬时幅值和频率可以直接从包络信号和调幅信号中获得[82-83]。由于LMD 的优势明显,Gupta 等[84-86]采用了该算法分析车削过程的声音信号,在结合均方根、峰峰值以及绝对平均值时,取得了良好的颤振识别准确率。
但LMD 为递归分析算法,且在步长选择不当时,仍会出现与上述模态分解方法相同的问题,Mishra 和Singh[87]则采用了样条局部均值分解(Spline Based Local Mean Decomposition,SBLMD)算法,改善了传统LMD 的固有缺陷,并开发了基于SBLMD 铣削颤振在线监测系统,如图6 所示。

图6 基于SBLMD 的颤振实时监测系统Fig.6 Real-time monitoring system of chatter based on SBLMD
2.3 不同液体管理方案对24 h液体复苏达标率的影响 实验组6 h及24 h液体复苏达标率分别为67.67%和83.33%,相较于对照组的20.00%和44.00%,实验组达标率更高,两组间差异有统计学意义(P<0.05),见表2。
变分模态分解(Variable Mode Decomposi‐tion,VMD)法则属于非递归分析法,其本质是具有自适应特性的维纳滤波器组合,具备高效、精准的信号处理能力,可明显缓解上述方法中存在的固有缺陷,因此VMD 在特征提取方面优势显著。如Li 等[88]提出了一种基于VMD 和功率谱熵差铣削颤振早期监测方法,可有效监测铣削早期颤振情况。Mou 等[50]比较了基于变分模态分解能量分布和变分模态分解能量熵的两种薄壁铣削颤振监测方法,前者具有更高的灵敏度和稳定性。然而VMD 须提前确定模态数K和惩罚因子α,针对该问题,Yang 等[89]利用模拟退火算法优化VMD 的参数K和α,在连续颤振和间歇颤振中均具有良好的颤振在线监测效果。Liu 等[90]结合粒子群算法可实现最优参数的自动获取。Zhang 等[91]提出一种快速迭代变分模态分解方法(Fast Iterative Variational Mode Decomposi‐tion,FI-VMD),解决了参数设定问题,如图7 所示。Liu 等[51]根据颤振信号与峭度值高相关性的特点,提出了基于峭度的VMD 参数自动选择方法,可通过确定最大峭度值从而确定最优参数。Liu 等[92]采用了快速局部平均经验模态分解,该方法可高效、自适应地计算出模态参数。
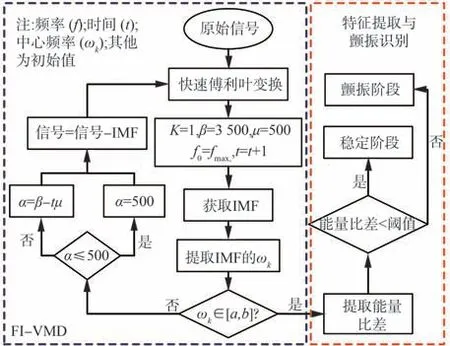
图7 基于FI-VMD 的参数获取与颤振识别Fig.7 Parameter acquisition and chatter identification based on FI-VMD
目前,颤振特征提取技术中还未能同时兼顾颤振提前预警和精确预警。针对不同的切削加工过程,须采用合适的特征提取技术,可获得适用于不同加工过程的敏感特征量。表3 总结了上述信号处理方法的优缺点及适用范围,可为下一步颤振识别的精确性与鲁棒性奠定良好的基础。

表3 颤振特征提取方法总结Table 3 Summary of chatter feature extraction algorithm
3 颤振识别技术
颤振识别过程是对切削加工状态的分类过程,是颤振在线监测的最后一步,也是最关键一步。目前,常用的颤振识别方法有阈值法和模式识别法[93],由于颤振伴随着频率和能量的再分配,因此通过提取颤振频率后并结合特殊指标(能量指标、熵特征等)的方式可通过阈值法实现颤振识别,在本文频域分析中有具体阐述。另外有较多学者[69,91,94-97]为提高阈值法在颤振识别中的精确性,分别提出了参数获取方法、相对阈值算法、颤振信号增强方法以及频率消除算法等方法,阈值法虽能迅速判断工件加工状态,但难点在于如何确定一个自适应阈值。
当前依靠模式识别法实现切削加工颤振识别仍然普遍,模式识别法是将采集的原始数据对机器学习模型进行训练,然后对数据进行分类的过程。下文从有监督和无监督学习两个方面来阐述模式识别的特点和应用情况。
徐州90年代时的商业设施布局以沿路布置为主,集中分布在淮海路沿线、中山路沿线以及主要干道交叉口,整体形成沿街为市的空间布局形态;随后2000年开始商业设施在原有的基础上进行延伸扩大,在中山路与淮海路形成块状节点,同时,结合户部山、矿业大学等形成多处商业设施,并在大郭庄机场西南侧、沿三环东路、荆马河北侧等地区形成大型市场用地;现如今,随着徐州经济的快速发展,商业综合体主要集中在老城区,老城区商业设施布局从带状向面状发展演变,新城区商业综合体、铜山片区商业综合体以及城东新区商业中心等商圈也都应势而起。如图1所示。
5)变分模态分解法
3.1 有监督颤振识别技术
有监督学习是通过利用若干有标记的样本,对相关机器学习进行有指导性地训练,从而得到一个分类模型,利用该模型可对未知标签的数据完成分类。此类算法可充分利用标记信息实现方向性学习,因此具备良好的颤振识别准确率。
利用频域分析获得信号中的颤振频率信息,并结合相应的颤振特征,可通过颤振阈值检测的方式实现加工状态识别,相较于机器学习进行颤振识别,具有更好的颤振识别效率,常见的颤振频率提取相关算法总结如表2 所示。
如果说盖博和苏珊娜的爱是爱在神性的死中战胜了自然性的死,那么,浮西努对盖博的爱,便是努力地将一眨眼的幸福变成永恒的情爱,浮西努因为战争,可以让自己对一个男人的爱意轻而易举地无限地扩张,由此产生的艺术魅力使整部作品充满诗意。
相比DNN,支持向量机(Support Vector Machine,SVM)在非线性、小样本的数据中可表现出更好的鲁棒性和泛化能力。钱士才等[103]建立了基于数据集特征库的可在线进化最小二乘一类支持向量机(Least Squares One Class Sup‐port Vector Machine,LS-OC-SVM)颤振识别模型。Chen 等[104]采用了线性支持向量机(Linear Support Vector Machine LSVM)模型,其计算量小、实时性好,为颤振在线监测系统开发提供了策略。Li 等[105]采用了多分类支持向量机(Multi-Class Support Vector Machine,MC-SVM)模型,弥补了LSVM 分类精度较差的问题。Wan等[106]通过Adaboost 算法集成多个SVM 弱分类器,以组成性能更佳的强分类器Adaboost-SVM,避免了因样本标签错误导致颤振分类精度下降的问题,如图8 所示。Ren 和Ding[107]将自适应Hanke 低秩分解(Adaptive Hankel Low-rank Decomposition,AHLRD)和SVM 结合,并对信号处理和颤振识别进行了实时性评估,建立了具备良好的实时性、精度和早期颤振敏感性的颤振监测系统。
“雨课堂”提供了填空题、单选题、多选题、主观题、投票等互动设置,教师提前设置题目,课堂发布,学生在手机上即时作答,答题结果当即反馈给教师,方便及时评估学生知识点掌握情况。在具体的教学过程中,采用分组讨论,提前设置主观题“中美贸易摩擦对航运业的影响”“大数据和互联网+背景下,船舶经纪人将何去何从”等,学生分组查阅资料并展开激烈讨论,踊跃发表自己观点,大大提高上课质量。同时也可发布试卷,进行课堂测验。

图8 Adaboost-SVM 原理图结构[106]Fig.8 Adaboost-SVM schematic structure[106]
提升法(Boosting)同样由多个弱分类器所组成,所构成的强分类器极大地提升了其预测精度,并具备参数设置简易、无需先验知识等特点[108]。目前用于颤振识别的相关算法有梯度树提升算法(Gradient Tree Boosted,GTB)和轻梯度提升算法(Light Gradient Boosting,LGB)。其中GTB 在确定颤振时间和严重程度方面实现了智能化应用[14],如图9 和图10 所示。LGB 则通过结合近邻传播聚类算法后实现了在可变切削条件下的高精度颤振识别结果[109]。

图9 颤振实际发生与检测时间点对比图Fig.9 Comparison of actual chatter occurrence and de‐tection time points
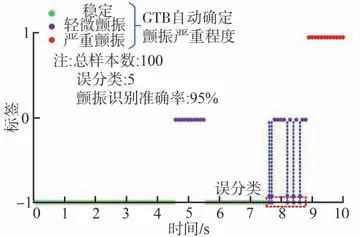
图10 GTB 识别颤振严重程度与准确率Fig.10 Grade and accuracy of GTB chatter identification
决策树可通过信息增益寻找最大信息量的属性字段,从而建立并延伸决策树的节点和分支,所形成的树状结构使得模型具有可读性强、实现简单以及分类迅速等特点[110],克服了提升法的不足。Wang 等[111]利用分类和回归树(Classi‐fication and Regression Trees,CART)算法建立了自动颤振识别的决策树模型。然而决策树易出现过拟合现象,而梯度提升决策树(Gradient Boosting Decision Trees,GBDT)针对该问题可取得良好的优化效果,周晓敏等[112]则通过GBDT 算法建立了振动能量回归模型并完成了特征选择以及模型简化,实现了冷轧颤振监测。此外,有学者将优化算法与K 近邻结合[113-114],降低了运算成本,采用隐马尔可夫模型[115]建立颤振辨识模型,采用随机森林[116]克服了决策树容易陷入过拟合的问题,均取得了良好的颤振识别精度。
数控机床各执行部件的运动主要依靠PLC信号实现,因此数控机床各项参数的采集可通过读取机床端PLC 信号获得[9];机床端PLC 信号的采集方法主要有:PCI(Peripheral Component In‐terconnect)总线采集法[18]、嵌入式系统采集法[19-21]和机床外接PLC 采集法[22-23],前二者在实时性和可靠性上更佳,后者则具备更好的灵活性。基于PLC 数据采集架构主要由设备层和PLC 数据采集层以及数据传输层(串口、网口等)组成[24],其原理是PLC 对设备层中传感器的模拟信号进行采集,然后将模拟信号进行A/D 转换为数字信号后,最终将数字信号经过不同的矩阵运算即可输出对应类型的信号[23](如力信号、加速度信号)。另外依靠数据传输层中的PLC 通讯接口,可使数据有利于存储和传输,当前较先进的PLC 设备开始支持以太网,搭配网口通讯的PLC将进一步提升数据的传输能力。
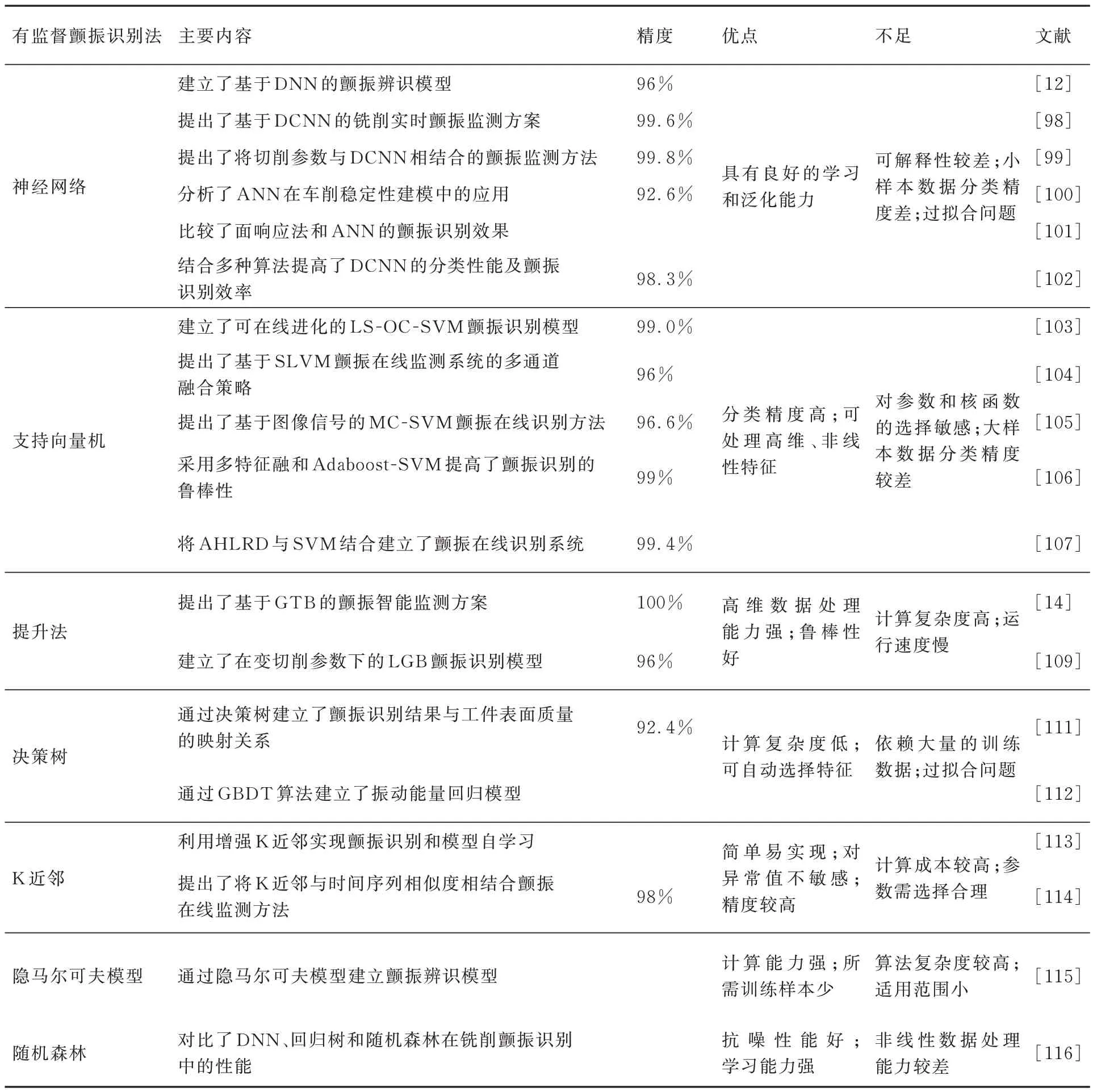
表4 有监督颤振识别法优缺点及应用总结Table 4 Summary of advantages,disadvantages and applications of supervised chatter identification
3.2 无监督颤振识别技术
无监督学习无需预先训练出模型,可通过输入无标签数据,依靠数据中蕴含的结构构造模型,适合用于实时、高速的处理场景[117]。相比于有监督学习,无监督学习在挖掘数据潜在信息上更具优势,避免了依赖大量人工标记数据导致的标记成本高的问题。随着计算机硬件和算法的发展,无监督学习开始逐步应用于切削加工颤振识别,如聚类法和高斯混合模型。
相较于有监督学习,无监督学习在精度上稍逊一筹,因此,须选择更加合适的特征,Wang等[37]从峭度概率密度函数(Kurtosis Possibility Density Function,KPDF)中提取了相交距离和交叉面积两种颤振指标,该两种指标与K-means聚类法相结合,聚类精度有明显提高,如图11 所示。由于K-means 聚类法的K 个初始聚类中心的选择是随机的,易导致算法对异常数据格外敏感,从而影响分类精度。张雪峰[118]通过建立聚类数和中心距离的函数关系,选择图像拐点作为最佳K 值,然后采用K-means 聚类法对铣削工艺系统动刚度变化情形进行归纳,建立了铣削工艺系统的动刚度计算公式。Dun 等[119]采用一种基于密度和距离度量的混合聚类法对压缩信号进行分类,克服了K-means 聚类法无法解决不规则形状数据集的问题。
从“十二五”期间国际油价大幅下跌以来,石油勘探开发板块整体效益大幅下滑,低效益、负效益成为石油开发近年的“热词”。如何实现长期的可持续、高质量发展,是全球各大石油公司面临的巨大挑战。同时受低油价影响,科技研发投入降低,世界范围内除美国页岩油外,近年来油田开发技术,尤其是老油田提高采收率技术没有大的突破与创新。大港油田作为一个开发五十余年的老油田,面临的形势更加严峻。

图11 基于KPDF 和K-means 的颤振在线监测流程图Fig.11 Flow chart of online chatter monitoring based on KPDF and K-means
高斯混合模型(Gaussian Mixture Model,GMM)依据概率分配聚类成员,相较于K-means聚类法具有更灵活的类簇形状。Wang 和Cunha[120]在高速切削加工中比较了GMM 与Kmeans 聚类法两种无监督算法,其中GMM 可处理更多形状的数据集。为解决传统GMM 存在概念漂移问题,Diaz-Rozo 等[121]提出了一种基于GMM 的动态概率聚类法,可用于实时监测机床颤振情况,并具备更好的鲁棒性。Fu 等[77]将归一化能量比(Normalized Energy Ratio,NER)和CV 两种特征与GMM 结合实现了颤振监测中阈值的自动确定,如图12 所示。汪晓姗[122]采用GMM 对特征进行拟合,建立了颤振特征与铣削状态之间的函数关系,增强了颤振在线监测的实时性。
校企合作课题研究培训教师的教科研能力是一种新尝试,碰出了校企合作的感情火花和创新思维。这种以课程教学创新为目标、以研发产品为载体的培训活动增加了校企合作的粘度,也打开了教师教学改革的视野,取得的成果更加刺激了教师的积极性,对于专业带头人致力于专业教学改革提供了新的思路,达到了“授人以欲”到“授人以渔”的目的。其成功的原因主要归纳为24个字:自主研发、入心激欲、过程评价、分层管理、闭环控制。

图12 基于GMM 的颤振识别模型[77]Fig.12 Model of chatter identification based on GMM[77]
无监督学习法发展相对缓慢,目前仍缺乏较好的逻辑推理和记忆能力,当前基于无监督颤振识别技术的研究还需增加相应评估,如聚类趋势、数据簇数以及聚类质量等。在实际生产生活中,无标签数据占主体,采用无监督学习发现数据的内在关系,可获得更好的颤振监测效率,在未来有更广阔的发展空间。
本文采用聚类分析方法对不同载荷分布比例的车辆进行区分,聚类后同类数据尽可能地聚集到一起,不同类的数据尽量分离,以找到隐含的规律。聚类算法的选择取决于数据的类型和聚类的目的。K-均值(K-Means)是划分方法中比较经典的聚类算法,效率较高,广泛应用于大规模数据的聚类。
4 结论与展望
对国内外关于切削加工过程中颤振在线监测方面的研究进行了总结,主要包括颤振数据采集方法、影响颤振信号处理实时性与精确性的关键因素以及基于有无监督学习的颤振识别方法。在数据采集方面,目前有外接传感器数据采集、PLC 数据采集和通讯接口数据采集,该3 种数据采集方式在使用场合及数据采集种类方面具有较好的互补性,通讯接口采集技术在数据采集与处理之间体现了较好的协同性。在信号处理方面,现有研究主要集中在对算法的优化以及建立高效的颤振信号处理系统。在颤振识别方面,现有工作主要体现在提升有监督颤振识别法的时效性以及无监督颤振识别法的精确性方面。
总体而言,目前国内外学者在切削加工颤振在线监测研究中取得了一系列进展,但在保证颤振识别精确性的前提下,真正实现颤振的实时监测仍存在较大距离,笔者认为可以从以下3 个方面进行更深入研究:
1)通过外接传感器的数据采集方式仍是当前主流,但各传感器存在固有缺陷,易遗漏加工过程中的有用信息,利用通讯接口采集技术可获得良好的数据采集和处理能力,实现更高效的颤振在线监测,将是未来数据采集的趋势。
由双向DC/DC变换器的效率分析可知DC/DC变换器两侧的蓄电池和超级电容的压差越小,DC /DC变换器的效率越高。为了有效利用变换器的效率,所以在进行复合电源参数匹配分析时,应该让超级电容组的电压和蓄电池组的电压接近。按照分析,超级电容容量应该满足的约束条件为:
目前通讯接口采集技术仍存在通讯接口不统一、兼容性和开放性不足以及过分依赖高性能软硬件设备等问题,如何解决上述问题是未来颤振在线监测更好运用于工程实际的关键。
此功能使用的是Valve公司发布的SteamVR插件,并将该插件导入到Unity3D游戏开发引擎中,再经过脚本命令的编写,完善其精细程度,将其导出为APK文件安装至手机,即可实现三维人骨模型的虚拟增强。
2)目前大多学者都致力于建立先进的颤振在线监测系统,然而现有的监测系统仍无法及时反馈机床的状态信息,且颤振识别精度会随着加工系统刚度变化而逐渐下降,笔者认为可以从以下几点进行研究:①研究颤振特征选择与融合的理论基础;②探究先进的实时数据处理和决策方法;③开发具备特征自动提取、在线进化的颤振监测系统。从而有效识别颤振早期信号特征,是进一步提高颤振监测实时性与精确性的关键。
3)目前在颤振监测过程中,有监督学习因需要大量带标记数据,代价昂贵,已逐渐发展到瓶颈,无监督学习具备快速的计算能力,不依赖样本标签,将会是未来智能化颤振在线监测的重要发展方向。提升无监督学习信息利用率、深入探究有监督与无监督学习的融合机制,以建立同时具备良好的实时性和精确性的颤振识别模型,可作为未来颤振在线监测的研究方向之一。