花椒采摘软体机械手的设计研究*
2023-07-21唐英文陈治帆韩丹丹谭云峰
王 键 ,陈 霖 ,唐英文 ,陈治帆 ,韩丹丹 ,谭云峰 ,胡 森
(四川农业大学,四川 雅安 625014)
花椒原产于中国,是中国特色经济物种,可作材用与药用,也是我国菜肴中不可缺少的调味品,在我国平原和海拔2 500 m 以下丘陵山地均可良好生长,遍布我国20 余个省份,其中以四川、甘肃、陕西为主要栽培地区。花椒树耐贫瘠,因此花椒产业成为贫困地区农民脱贫增收的重要支柱产业。但大部分花椒生长于山坡及山脚,宜机性差,无法使用大型机械,且花椒树枝条生长、果实分布均无序,花椒外部保持花椒风味的油胞易破。当前我国花椒采摘仍以手工为主,青花椒可采用“带枝采摘”的收获方式,红花椒只能采取树上掐摘收获方式,无论采用哪种方式,采摘效率仍然低下,工人在收获过程中还极易受伤。因此,本文对现有花椒采摘机具研究现状进行论述,为采摘机具的研发和花椒产业的发展提供参考。
1 花椒机械化采摘的必要性与研究现状
1.1 手工采摘效率低、成本高
花椒采摘是花椒种植至收获过程中最为费时费力的环节,全树带刺、树型散乱及油胞易破等特性大大增加了花椒机械采摘难度,制约了花椒生产过程机械化水平的发展,同时造成人工采摘困难、效率低、成本高。青花椒人工采摘费用为2 元/kg~3 元/kg,采摘效率为20 kg/d~40 kg/d,红花椒人工采摘费用为4元/kg~6 元/kg,采摘效率为15 kg/d~25 kg/d,花椒种植大户要完成适时采摘,需要雇佣大量工人,人工成本急剧增高,极大地制约了花椒产业的发展。而花椒树茎、枝、叶轴、叶柄及小叶均带刺,手工采摘易受伤,青花椒可用剪切工具代替手工掐摘,但红花椒果实旁长有来年的花椒芽,使用工具将伤害花椒芽,降低来年花椒产量,只能采取手工掐摘,花椒油胞易破,导致长时间采摘后指甲缝受花椒影响出现麻疼感,若采用护具,则会降低采摘效率,由此加剧了农村劳动力短缺与用工需求增加之间的矛盾。
1.2 种植规模扩大,急需提高采摘效率
近年来,得益于扶贫产业实施、需求拉动产业等各方面政策的综合推动,我国花椒种植面积迅速扩大。2021 年,根据国内25 个产区的数据,花椒栽种面积共1 728.4 万亩。其中,青花椒主要分布在四川、云南、贵州和重庆等省份,栽种面积占60%;其余产区以红花椒为主,栽种面积占40%。由于花椒种植面积的迅速增加,花椒已出现供过于求现象,价格下跌,极大地打击了农民种植积极性。2022 年,重庆江津青花椒更是跌至2 元/kg~4 元/kg,同时用工量也随之上升,除去成本,农户无利可赚甚至亏损。特别是到6—8 月花椒成熟期时,采摘工人的需求激增。若不能在收获期收获花椒,会造成产量降低以及花椒品质下降,收获过早,花椒果皮薄,油胞不饱满,品质不高;收获过晚,花椒籽爆出,果穗脱落,产量降低[1],6—8 月雨水丰富,采摘不及时,花椒会因雨水影响脱落甚至霉变。若不采取措施提高花椒收获效率,用工需求增加与劳动力短缺之间的矛盾可能愈演愈烈。实现机械采摘,降低成本,是缓解种植面积迅速扩大冲击花椒行业的良好手段,有利于巩固脱贫攻坚成果和促进花椒产业长期稳定发展。
1.3 花椒采摘机械研究现状
从20 世纪80 年代起,就有许多椒农自制花椒采摘工具来代替手工掐摘[2],以此应对花椒采摘的瓶颈,而后花椒采摘机械开始正式研发。2009年,张涛依等设计了一款全自动花椒采摘机[3],该花椒采摘机生产效率是手工收获的8~10 倍,且体积小、质量小、方便携带,但收获质量不高。2016 年,王峰设计出负压吸收式花椒采摘机[4],该机采用负压吸收式采果,有效提高采收安全性、采收率和采收速度。2017 年,郑天云设计完成了双盘平板式花椒自动采摘设备[5],该设备的机械部分避免了采摘过程中损伤椒树,且采摘时能一次性将花椒收集于布袋中,使其收获后杂质较少。2022 年,陕西省宝鸡市农业科学研究院的毋万来等在已取得的“一种精准型电动疏花疏果装置”专利基础上研制出一种电动花椒采摘器[6],这款花椒采摘器采用S 型刀片切割采摘,可明显提升采摘效率。除采用刀片收获外,也有采用气吸或梳齿滚刷收获。2014 年,甘肃农业大学的万芳新设计梳齿式花椒采摘机[7],该机利用拨椒轮高速旋转时产生的梳刷作用和拨椒轮与弧形凹板间相对运动所产生的搓擦作用收获花椒,采收率高,花椒及其枝叶损伤小,利用伸缩柄,可以满足不同高度花椒的收获。2018 年,重庆市农业科学院的冯伟等设计了一种手持式花椒采摘机[8],该花椒采摘机通过喂入口对花椒枝条进行限位,然后通过梳刷滚筒的作用实现花椒收获。2020年,贵州理工学院机械工程学院的黎书文等设计了一种新型的手持电动式花椒采摘机[9],采用电机带动滚筒旋转,梳刷将花椒枝条揽入进料口,再利用往复切割单动式双层齿状刀片实现花椒采摘,提高了花椒采摘机械化程度,且有效降低采摘过程对人体的伤害。2021 年,甘肃农业大学的万芳新等研制了梳齿-气吸式花椒采摘机[10],利用梳齿实现花椒果实和枝条分离,利用轴流式风机产生的流场运输和清选花椒果实,整体效果较好,但整体机械较大,对于丘陵山地地区种植的花椒不适用。近年来,视觉识别技术快速发展,也有学者研究了自动识别花椒系统[11-12],经过训练后效果明显提升。
现有花椒采摘机械皆为剪切或气吸式机械,而椒农普遍反映现有机械使用不便,若无法在收获期内收获花椒,过早或过晚都会影响花椒品质和产量,因此急需开发新式采摘机械。本文提出一种刚性骨架与柔性蒙皮相结合的软体机械手,模拟人手掐摘花椒过程,气囊充气驱动关节转动,安装在机械臂的末端,结合视觉识别技术可实现花椒智能采摘。
2 建模方案
2.1 工作要求
青红花椒生长状态、采摘方式不同,因此本文设计的软体机械手主要针对红花椒。红花椒果实旁长有花椒芽,使用工具易伤害花椒芽,降低来年花椒产量,只能采取手工掐摘,花椒油胞易破,破损将造成花椒发黑,花椒品质降低。为了保证红花椒在采摘时花椒芽和油胞不被破坏,需要采摘工具足够小巧且不挤压花椒。
2.2 机械手结构和工作原理
根据红花椒采摘技术要求,利用SolidWorks 2020 建模,得到花椒采摘软体机械手三维模型,如图1 所示。本文设计的软体机械手包括软体手指、关节气囊、手掌、底座和相机;每只软体手指有三段指节,手指两个关节处各嵌入关节气囊,三只软体手指安装于手掌上,手掌与底座相连,相机安装在底座上,使用时机械手与机械臂配合,安装在机械臂手腕顶部;对关节气囊充气时,气囊轴向膨胀,驱使三只手指同时向中心线靠近并向下移动,从而指尖抓紧花椒簇,机械臂手腕顶部旋转拧断花椒枝条,完成采摘。
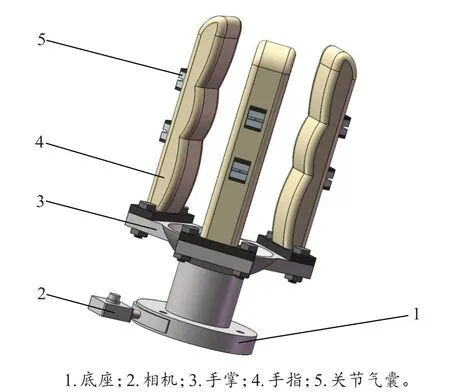
图1 软体机械手三维模型
与视觉识别系统配合,通过相机可以实时对花椒簇进行识别,判断其数量、位置、大小等,并控制手指气囊充气、机械臂运动、机械臂手腕扭转等动作,对花椒进行采摘,提高了自动化水平和可靠性。相机采集到图像后传输到计算机中进行处理分析,软体机械手工作流程图如图2 所示。
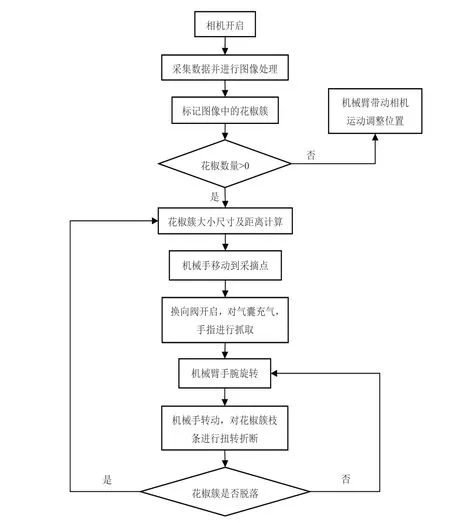
图2 软体机械手工作流程图
3 仿真分析
利用有限元软件ANSYS Workbench 17.0对机械手进行运动仿真,得出机械手工作时的应力分布和运动情况。向气囊内壁施加压力,模仿充气时的状态,以此进行仿真分析。
机械手运动情况如图3 所示。由图3 可知,第一个关节气压设置为0.03 MPa,第二个关节气压设置为0.02 MPa时,手指可合拢握紧。
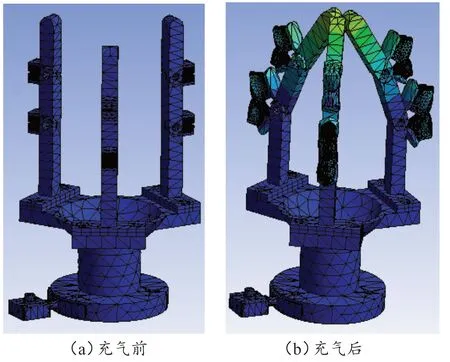
图3 机械手运动情况
机械手工作时应力分布如图4 所示。由图4 可知,机械手工作时最大应力为0.027 51 MPa,远小于结构钢屈服强度335 MPa,因此不会对采摘机构正常工作产生影响。
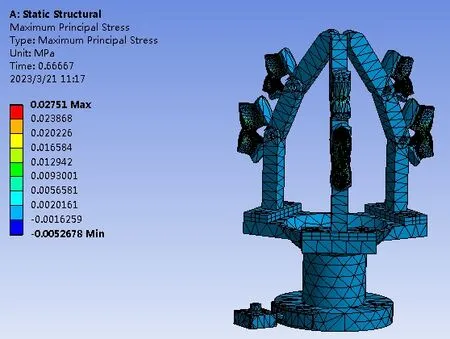
图4 机械手应力分布
4 结语
1)与传统花椒采摘器不同,课题组提出一种刚性骨架与柔性蒙皮相结合的软体机械手,模拟人手掐摘花椒过程,气囊充气驱动关节转动,与视觉识别系统配合完成花椒采摘。
2)利用ANSYS 软件进行仿真分析,验证了本文软体机械手设计方案的可行性。
