一种基于单星敏的人造星光定位方法
2023-07-20郜义蒙闵昌万杨锐
郜义蒙 闵昌万 杨锐
摘要:为解决惯性导航中快速发射初始位置不准引起的制导误差, 提出一种使用单星敏感器观测近地通信卫星的导航方式。 该方法通过观测卫星在惯性空间方位, 与计算机内仿真结果对比修正飞行器位置。 实验以一条仿真轨迹为例, 通过卡尔曼滤波组合导航进行了仿真。 结果表明, 该导航方式可以实现在观测到卫星30 s快速定位并达到350 m的定位精度, 可实现在不增加新导航设备的情况下进行快速位置修正, 提高了捷联惯导组合导航精度。
关键词:组合导航; 人造星光导航; 星敏感器; 卡尔曼滤波; 近轨卫星
中图分类号: TJ765; V249.32+2文献标识码:A文章编号: 1673-5048(2023)03-0087-06
DOI: 10.12132/ISSN.1673-5048.2022.0185
0引言
距离地球表面20~100 km的近空间, 具有重要战略价值[1]。 在该空间内, 飞行器飞行时间长、 飞行范围广、 机动能力强、 对自主导航有更高的要求[2-3]。 目前各国对近空间飞行器的研究多关注飞行器的飞行能力, 验证飞行器的结构与材料、 机动能力与控制系统等, 在测试实验中多使用惯导+卫星导航[4-6]。 使用卫星组合导航存在抗干扰能力差的问题, 在极端条件下有精度降低甚至失效的风险[7]。
天文导航作为一种稳定、 可靠的导航技术[8], 可实现高精度定姿。 使用地平基准的高度差法, 由于确定地平困难, 难以实现高精度定位[9]。 星光折射导航作为一种用于间接敏感地平的导航方式, 星光穿过稠密大气层而发生折射, 通过星折射角与大气视高度关系敏感地平, 解决了高度差法地平仪水平基准精度低的问题, 主要应用在大气层外, 大气层内研究较少[10-11], 且易受大气折射模型、 飞行高度影响。 随着星链计划开展, 近地通信卫星增加, 在提供通信功能的同时, 使用星链卫星机会信号的定位方式被提出[12-14], 而基于星链等近地卫星光学信息的导航方式还处于空白, 未来近地巨型星座轨道低、 数量多、 易于观测、 可选择性强, 极大改变了天空成像形态, 观测近地卫星定位的方式变得可行。
为解决该区域导航问题, 本文提出利用星敏感器观测近地卫星, 测量人造天体在惯性空间光学指向确定卫星方位, 与飞行器预存卫星坐标进行比对, 确定飞行器位置的定位方法。 该方法利用的卫星相对恒星距离更近, 其星点指向同时受卫星位置与距离影响, 飞行器位置的移动会直接改变卫星星点的指向, 可作为一种直接定位信息使用。 本文以完整星链卫星为基础, 对观测卫星定位的可行性、 精度等进行了分析, 提供了一种不额外增加传感器实现自主导航, 可实现快速位置修正要求的新导航方式。
1卫星观测模型
1.1近地卫星模型
截止2022年6月, 已经在轨的低轨卫星数目已超过5 000颗, 其中星链已经成为拥有2 000余颗卫星的巨型低轨通信星座, 并将于2027年达到约1.2万颗, 近地卫星数目将进一步增加。 目前在轨的星链卫星如图1所示。
美国SpaceX公司提交的星链卫星一期计划约1.2万颗, 目前卫星高度设计在330~570 km, 2020年5月提交的二期计划包含了约3万颗近地卫星, 将进一步增加低轨卫星数量。 除美国星链外, 欧盟等国家或组织也在实行各自的低轨通信卫星星座计划。 随着卫星数目的进一步增加, 将极大地增加卫星的可观测概率, 为观测卫星定位提供了可能。 本文以完整的星链卫星为校验对象, 展开研究。
1.2卫星光学可见性
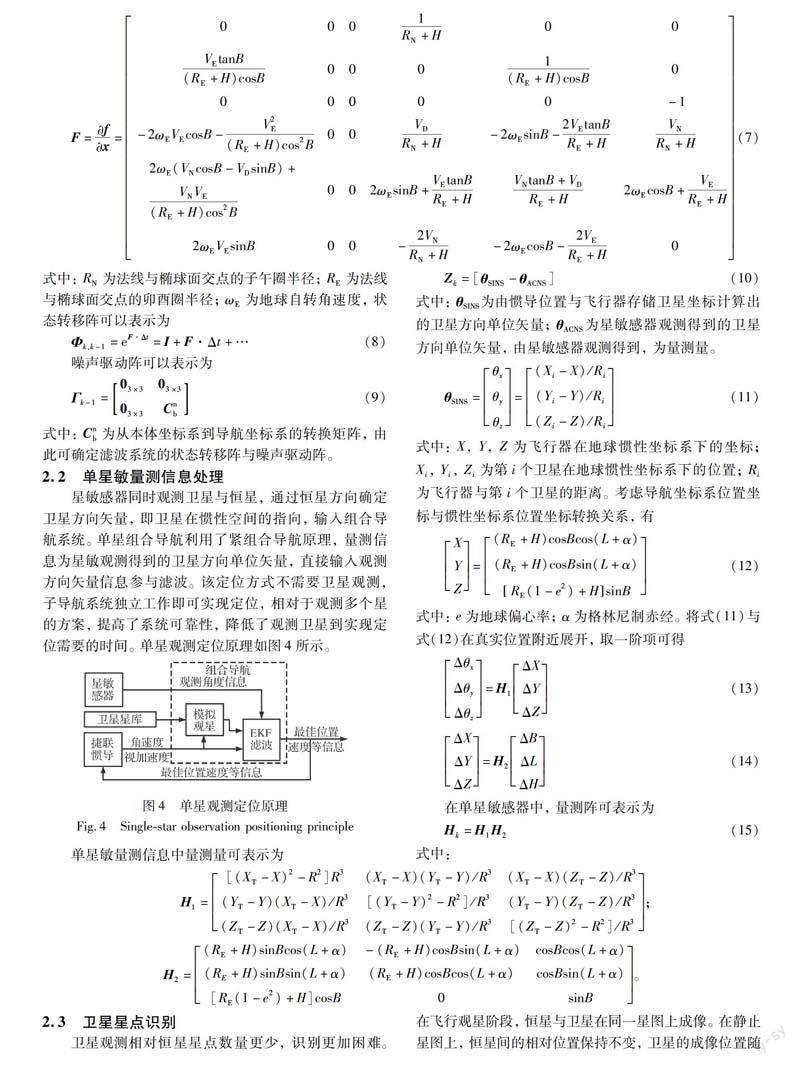
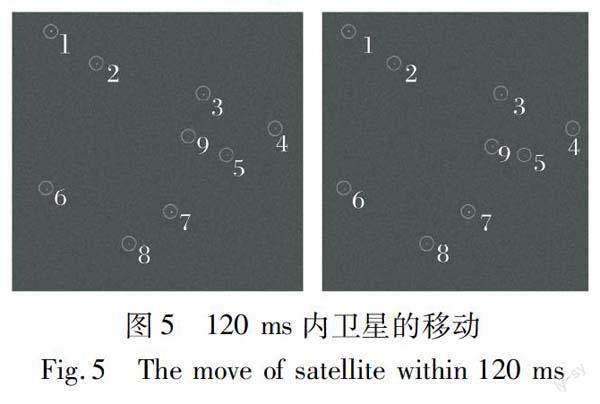
由于近地轨道卫星自身不具备发光能力, 只能通过反射太阳光发光, 卫星的光学可见性与卫星的特性(大小、 姿态、 形状、 反光特性)、 观测者与目标的距离(斜距)、 观察方向与太阳夹角(相位角)等因素有关, 不同的观测条件将影响卫星在星敏的可见性, 需要对卫星光学特性进行建模, 选择可见卫星进行观测。
本文在反光特性处理中按理想球进行简化分析, 反射强度由镜面反射与漫反射进行叠加计算。 镜面反射主要发生于高度平整的表面, 球镜面反射沿各向均向反射, 且大小与方向无关, 平面镜面反射方向性强, 观测使用范围小; 漫反射强度主要发生在粗糙表面, 反射强度与观测相位角有关[15-16]。
2.3衛星星点识别
卫星观测相对恒星星点数量更少, 识别更加困难。 在飞行观星阶段, 恒星与卫星在同一星图上成像。 在静止星图上, 恒星间的相对位置保持不变, 卫星的成像位置随时间变化, 这一不同为恒星与卫星的分离提供了条件。
与无初始姿态或姿态丢失情况下的星图识别不同, 在观星阶段飞行过程中, 导航系统已经完成初始姿态校正、 星敏感器安装误差校正, 星敏感器自身存在的坏点形成的静止假星也已实现剔除, 恒星成像在星图中的位置可由飞行器姿态预先确认, 误差约2~3个像素, 可实现恒星快速识别。
卫星识别中, 计算机首先计算得到卫星的惯性空间指向, 计算出卫星在星敏中出现区域。 与恒星不同, 卫星是运动状态, 且由于飞行器位置存在误差, 卫星指向可能范围可扩大40个像素, 识别范围内可能存在未知假星, 需要结合星点动态信息进行卫星识别。 在3~5张星图成像过程中可分离出与卫星移动方向和距离相同的星点, 即为识别卫星星点。
如图5所示, 恒星1~8相对保持静止, 卫星星点9在星图中存在明显移动。 利用这一不同可实现卫星识别, 卫星识别在原理上是可行的。
3仿真校验
3.1参数设计
(1) 时间与坐标系
星敏感器采样频率1 Hz, 捷联惯导采样频率200 Hz, 积分频度100 Hz, 双子样解算。 导航坐标系采用当地北东地坐标系, 星敏感器观测在地球惯性坐标系下进行。
(2) 飛行器轨迹
设计高空飞行器飞行轨迹, 如图6所示。 截取飞行距离5 000 km、 仿真总时长1 215 s、 飞行高度35~47 km仿真校验段, 仿真飞行在飞行过程中使用航天飞行标准轨道再入制导, 通过倾转进行主动能量耗散, 不进行观星目的的变姿机动。
轨迹起点为东经72.9°、 北纬74.7°, 高度47 km, 在仿真轨迹起点, 飞行器惯导位置与真实位置的误差为
ΔX0=[1 km,1 km,1 km,0.5 m/s,1.0 m/s,0.7 m/s]T(16)
(3) 卫星轨道设计
仿真中在轨卫星设计为星链计划全部完成时的卫星星座, 卫星总数目为11 914颗, 定轨误差均值为200 m(RMS), 各卫星定轨误差方向随机分布。 卫星整体分布如表1所示。
(4) 星敏感器参数
星敏感器视场角为20°×20°, 观测极限星等为7.0 m, 星敏感器精度为5″, 固联于飞行器, 在本体坐标系中指向为T0=[-0.565, 0.474, -0.676]。
(5) 惯导主要性参指标
陀螺仪随机测量误差为0.015 (°)/h, 加速度计随机测量误差为20 μg, 随机测量误差均视为白噪声, 陀螺与加表零偏在仿真中视为已经标定。
量测阵不考虑卫星的位置误差, 当一个星敏感器视场中存在多个卫星时, 量测噪声阵需要根据卫星数目进行拓展。
3.2仿真结果
飞行器在飞行过程中不进行主动寻星, 当有卫星在视场中经过时进行观测, 当不存在卫星时进行纯惯导。 在非地影区进行组合导航, 可以得到如图7~8和表2所示的仿真结果。
从仿真结果可以得出, 在累计观测到卫星30 s后, 组合导航系统达到350 m, 实现目标导航精度。 之后通过观测卫星抑制惯导发散, 在最终定位精度上, 单星敏可以实现200 m的定位精度, 对惯导误差进行了有效修正。 在速度方面, 单星敏感器速度误差发生突变, 速度修正可信度低。
针对图8中速度误差突变问题进行单独分析, 选用同样的仿真条件, 令全部卫星拥有相同的定轨误差, 分析不同卫星轨道误差情况下的定位、 定速精度, 结果如图9~10所示。
通过以上分析可得, 观测卫星定位方式下, 定位精度主要与卫星的轨道精度有关, 轨道精度越高, 定位精度越高; 而定速精度主要取决于观测前后卫星的轨道精度变化, 当观测前后卫星定轨精度不同时, 卫星速度将出现大突变, 导致速度信息出现大误差。
4结论
本文提出一种利用单星敏感器观测低轨卫星的导航新方法, 对影响定位实现的因素进行分析, 建立了单星敏卫星观测定位模型, 并进行仿真校验。 该方法使用的低轨卫星数量多, 星座卫星可观测能力强, 无需借助电磁信号, 在飞行前装订卫星数据后可以作为一种“自主导航”方式使用。
仿真分析表明, 飞行中无需进行主动寻星便可实现卫星观测, 单星敏方案设备简单, 可利用飞行器原有的姿态修正星敏感器, 而无需新的星敏感器, 观测卫星更加容易, 更具有实用价值。 基于单星敏的紧组合导航可以实现快速定位, 表明该方法可以应用于高空飞行器导航。
参考文献:
[1] 薛永江, 李体方. 临近空间飞行器发展及关键技术分析[J]. 飞航导弹, 2011(2): 32-36.
Xue Yongjiang, Li Tifang. Development and Crucial Technology Analysis of Near-Space Vehicle [J]. Aerodynamic Missile Journal, 2011(2): 32-36.(in Chinese)
[2] 王鹏飞, 王光明, 蒋坤, 等. 临近空间高超声速飞行器发展及关键技术研究[J]. 飞航导弹, 2019(8): 22-28.
Wang Pengfei, Wang Guangming, Jiang Kun, et al. Research on the Development and Key Technologies of Hypersonic Vehicle in Near Space [J]. Aerodynamic Missile Journal, 2019(8): 22-28.(in Chinese)
[3] 田宏亮. 临近空间高超声速武器发展趋势[J]. 航空科学技术, 2018, 29(6): 1-6.
Tian Hongliang. Development Trends of Near Space Hypersonic Weapon[J]. Aeronautical Science & Technology, 2018, 29(6): 1-6.(in Chinese)
[4] 李海林, 吴德伟. 高超声速临近空间武器平台导航方案研究[J]. 飞航导弹, 2012(2): 72-78.
Li Hailin, Wu Dewei. Research on Navigation Schemes of Hypersonic Vehicles in Near Space [J]. Aerodynamic Missile Journal, 2012(2): 72-78.(in Chinese)
[5] Hank J M, Murphy J S, Mutzman R C. The X-51A Scramjet Engine Flight Demonstration Program[C]∥15th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, 2008.
[6] 陈冰, 郑勇, 章后甜, 等. 临近空间高超声速飞行器导航技术发展综述[J]. 飞航导弹, 2021(12): 57-62.
Chen Bing, Zheng Yong, Zhang Houtian, et al. Review on the Development of Near Space Hypersonic Vehicle Navigation Technology [J]. Aerodynamic Missile Journal, 2021(12): 57-62.(in Chinese)
[7] 陈冰, 郑勇, 陈张雷, 等. 临近空间高超声速飞行器天文导航系统综述[J]. 航空学报, 2020, 41(8): 623686.
Chen Bing, Zheng Yong, Chen Zhanglei, et al. A Review of Celestial Navigation System on Near Space Hypersonic Vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(8): 623686.(in Chinese)
[8] 房建成, 宁晓琳, 田玉龙. 航天器自主天文导航原理与方法[M]. 北京: 国防工业出版社, 2006.
Fang Jiancheng, Ning Xiaolin, Tian Yulong. Principles and Methods of Spacecraft Celestial Navigation [M]. Beijing: National Defense Industry Press, 2006.(in Chinese)
[9] 封天明, 李涧青, 高长生, 等. 考虑地球敏感器误差的自主导航方法研究[J]. 上海航天, 2017, 34(2): 112-119.
Feng Tianming, Li Jianqing, Gao Changsheng, et al. Study on Autonomous Navigation with Error of Earth Sensor[J]. Aerospace Shanghai, 2017, 34(2): 112-119.(in Chinese)
[10] Qian H M, Sun L, Cai J N, et al. A Starlight Refraction Scheme with Single Star Sensor Used in Autonomous Satellite Navigation System[J]. Acta Astronautica, 2014, 96: 45-52.
[11] 詹先军, 王新龙, 胡晓东, 等. 大气层内载体星光折射间接敏感地平定位可行性分析[J]. 航空兵器, 2022, 29(1): 107-112.
Zhan Xianjun, Wang Xinlong, Hu Xiaodong, et al. Feasibility Analysis of Stellar Refraction Indirect Horizon Sensing Positioning on the Carrier Inside the Atmosphere[J]. Aero Weaponry, 2022, 29(1): 107-112.(in Chinese)
[12] Khalife J, Neinavaie M, Kassas Z M. The First Carrier Phase Tracking and Positioning Results with Starlink LEO Satellite Signals[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(2): 1487-1491.
[13] 秦紅磊, 谭滋中, 丛丽, 等. 基于铱星机会信号的定位技术[J]. 北京航空航天大学学报, 2019, 45(9): 1691-1699.
Qin Honglei, Tan Zizhong, Cong Li, et al. Positioning Technology Based on IRIDIUM Signals of Opportunity[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(9): 1691-1699.(in Chinese)
[14] 秦红磊, 张宇. 星链机会信号定位方法研究 [J/OL]. 导航定位学报.[2022-09-07]. https:∥kns.cnki.net/kcms/detail/10.1096.P.20220516.1435.004.html.
Qin Honglei, Zhang Yu. Positioning Technology Based on Starlink Signal of Opportunity[J/OL]. Journal of Navigation and Positioning.[2022-09-07]. https:∥kns.cnki.net/kcms/detail/10.1096.P.202205 16.1435.004.html.(in Chinese)
[15] 何武灿, 廖守亿, 张作宇, 等. 空间目标可视条件与可见光特性分析[J]. 电光与控制, 2015, 22(5): 97-102.
He Wucan, Liao Shouyi, Zhang Zuoyu, et al. Analysis of Visible Conditions and Visible-Light Characteristics of Space Targets[J]. Electronics Optics & Control, 2015, 22(5): 97-102.(in Chinese)
[16] 李雅男, 孙晓兵, 乔延利, 等. 空间目标光学特性模拟实验研究[J]. 应用光学, 2009, 30(6): 895-900.
Li Yanan, Sun Xiaobing, Qiao Yanli, et al. Experiment of Optical Characteristic Simulation of Space Target[J]. Journal of Applied Optics, 2009, 30(6): 895-900.(in Chinese)
An Artificial Celestial Observation Navigation System Using Star Sensor
Gao Yimeng1, Min Changwan2, Yang Rui1
(1. Beijing Institute of Astronautical Systems Engineering, Beijing 100076, China; 2. China Academy of Launch Vehicle Technology, Beijing 100076, China)
Abstract: To solve the guidance error caused by inaccurately initial position of rapid launch in inertial navigation, a navigation method using a single satellite sensor to observe the near Earth communication satellite is proposed, which can correct the position of the aircraft through observing the position of satellite in inertial space and comparing with the computer simulation results. Taking a simulation trajectory as an instance, the paper conducts simulation experiments through Kalman filter integrated navigation. The results show that this navigation approach can realize the fast positioning of the observed satellite within 30 s and positioning accuracy of 350 m. In addition, it can realize the fast position correction without adding new navigation equipment, and improve the precision of integrated navigation of strapdown inertial navigation.
Key words: integrated navigation; artificial celestial navigation; star sensor; Kalman filter; LEO satellite
收稿日期: 2022-09-08
基金項目: 国家自然科学基金项目(12172058)
作者简介: 郜义蒙(1998-), 男, 河北沧州人, 硕士研究生。
*通信作者: 闵昌万(1971-), 男, 湖北大冶人, 博士, 研究员。
