基于圆弧摆线铰链的双光纤光栅加速度传感器
2023-07-12徐佳凯倪凯龚华平樊其明赵春柳
徐佳凯 ,倪凯 ,龚华平 ,樊其明 ,赵春柳
(1 中国计量大学 光学与电子科技学院 光电子技术研究所, 杭州 310018)
(2 中国计量科学研究院 光学与激光计量科学研究所, 北京 100029)
0 引言
近年来加速度传感器被安装于国内外许多大型桥梁上并应用于桥梁健康状况的监测[1],加速度传感器的性能对桥梁状况的实时监测有较大的影响。对于桥梁以及建筑物振动状况的监测,需要使用低频灵敏度高,且稳定可靠的加速度传感器,光纤光栅(Fiber Bragg Grating,FBG)加速度传感器与传统的压电式传感器相比,有灵敏度高、抗电磁干扰能力强等优点[2-3],可用于桥梁与建筑物的实时监测。并且桥梁监测需要进行多点同时进行,使用FBG加速度传感器分布式传感可以避免压电式加速度传感器出现的布线问题。
光纤光栅加速度传感器主要分为基于梁结构的光纤光栅加速度传感器和其他弹性结构体形式[4]。由于铰链结构的光纤光栅加速度传感器有梁结构的优点,整体振动结构一体成型,谐振频率比传统梁结构FBG加速度传感器高,并且可以更具实际需求改变加速度传感器的结构来满足特定的灵敏度与频率测量范围的要求[5-9],成为国内外光纤光栅加速度传感器研究的热点[10-12]。苏李等[9]研制了大量程高灵敏度的光纤光栅低频振动传感器,该传感器固有频率约为91 Hz,灵敏度约为1.94 nm/g。邱忠超等[13]研制了一种基于双弹性板的铰链型加速度传感器,该传感器使用双弹性板,传感器谐振频率约为1 300 Hz,灵敏度约为20 pm/g。
直圆摆线铰链是一种基于摆线与圆弧混合切口的异形非对称式柔性铰链结构[14],具有旋转中心可调的机械特征。本文根据直圆摆线柔性铰链结构设计了一种基于直圆摆线铰链的双光纤光栅加速度传感器,设计了特殊质量块结构,使用单光纤刻蚀双光栅,分析传感器各项尺寸结构对传感器灵敏度以及谐振频率的影响,通过理论分析优化传感器各项结构参数,设计制作满足桥梁加速度传感要求的传感器,最后进行实验验证理论分析结果。
1 传感器设计
1.1 传感器结构
传感器结构如图1所示,该传感器由直圆摆线铰链结构、双光栅光纤、矩形椭圆复合质量块以及传感器基座组成。传感器整体结构一体成型,单根光纤上刻蚀双光栅,通过胶黏的方式绕过半椭圆部分固定传感器一周,两个光栅位于铰链位置。当传感器受到外界激励时,质量块会绕着铰链进行振动,使得两个FBG分别产生伸缩,导致光栅中心波长产生漂移。两个FBG分别位于传感器的上下两侧,当质量块发生振动时两个FBG发生方向相反的形变,即当其中一个FBG拉伸时,另一个FBG处于收缩状态。
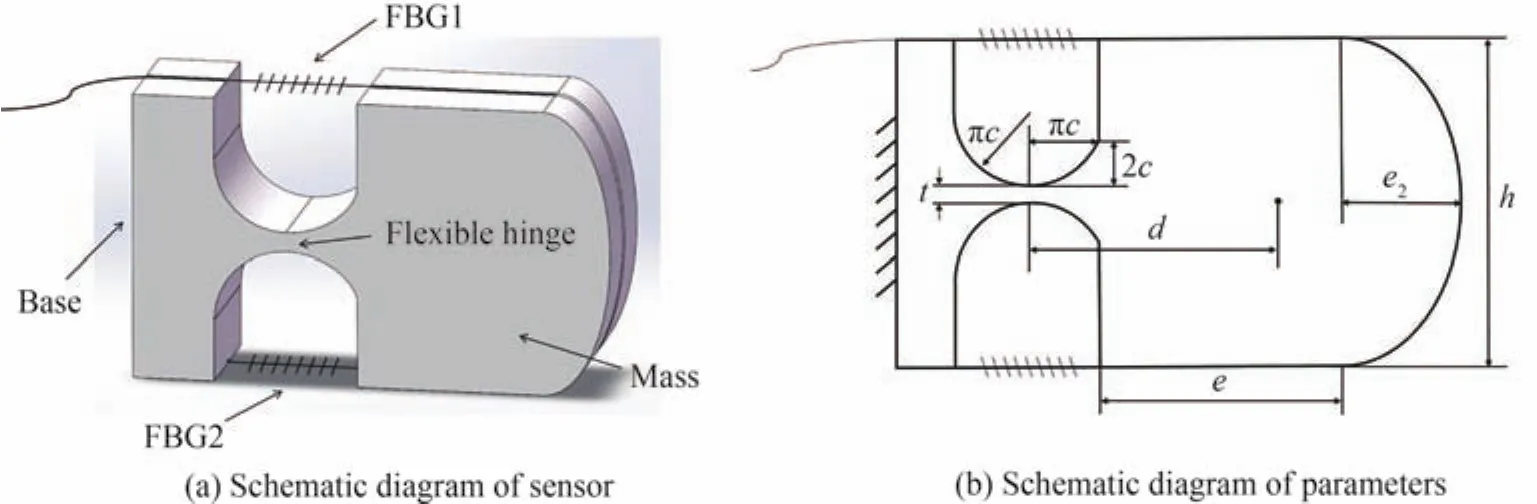
图1 加速度传感器结构及参数示意图Fig.1 Schematic diagram of acceleration sensor structure and parameters
1.2 传感器灵敏度分析
传感器力学模型如图2所示。加速度a作用在质量块上,使质量块绕着直圆摆线铰链进行轻微的振动。
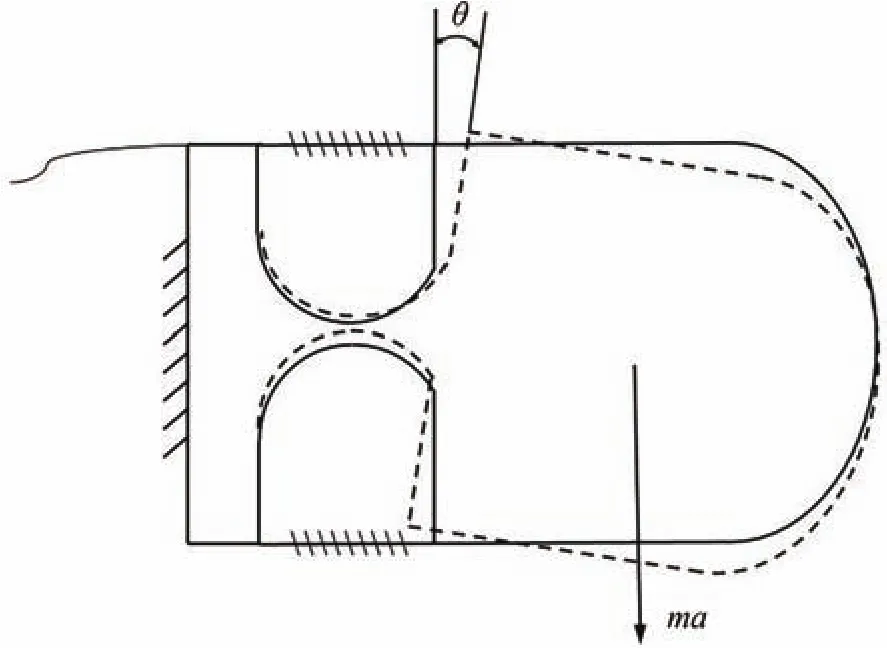
图2 加速度传感器振动模型Fig.2 Vibration model of acceleration sensor
由力矩平衡方程可以得到
式中,m为传感器质量块的质量,d为质量块质心到铰链中心的距离,k为光纤的弹性系数,Δl为光纤伸缩长度,h为质量块的高度,K为直圆摆线铰链转动刚度,θ为质量块转动角度,其中光纤弹性系数,Af为光纤横截面积,Ef为光纤的弹性模量,l为光纤固定点之间的距离。质量块质心到铰链中心距离。摆线拱高2c,摆线水平投影长度为πc。
铰链转动刚度
式中,f=f1+f2
式中,E为材料弹性模量,ω为传感器厚度,直圆半径R=π·c,t为铰链最薄处厚度,,。
传感器的灵敏度S由光纤光栅中心波长变化量Δl与传感器受到的加速度a的比值确定,即
式中,λ是光纤光栅的中心波长,Pe为光纤光栅有效弹性系数。
1.3 传感器谐振频率分析
谐振频率是加速度传感器的另一重要参数,传感器设计需要满足实际应用时的谐振频率要求。
根据平行轴定理得到质量块转动惯量
式中,m为质量块整体质量,m1为矩形部分质量,m2为半椭圆部分质量,长轴,短 轴a=e2,。
由动力学方程得到传感器谐振频率
2 仿真分析
2.1 结构参数对传感器影响
柔性铰链参数c,铰链最薄处厚度t,质量块高度h,质量块半椭圆短轴长度e2对传感器灵敏度以及谐振频率产生较大的影响。由于传感器是使用于桥梁上进行加速度检测,所以选择不锈钢作为传感器的制作材料,材料的弹性模量为200 GPa,密度为7 850 kg/m3,光纤弹光系数Pe为0.22,光纤光栅中心波长λ均为1 532.5 nm,反射率90%,边模抑制比11 dB。光纤固定点之间距离l=2πc,传感器厚度ω为16 mm,光纤横截面积Af为1.23×10-8m2,光纤弹性模量Ef为72 GPa。
分析质量块高度h和质量块半椭圆短轴长度e2对传感器灵敏度以及谐振频率的影响,令柔性铰链参数c=1.908 0 mm,20 mm≤h≤40 mm,5 mm≤e2≤10 mm,铰链厚度分别为1.5 mm,2 mm,2.5 mm,模拟结果如图3所示。
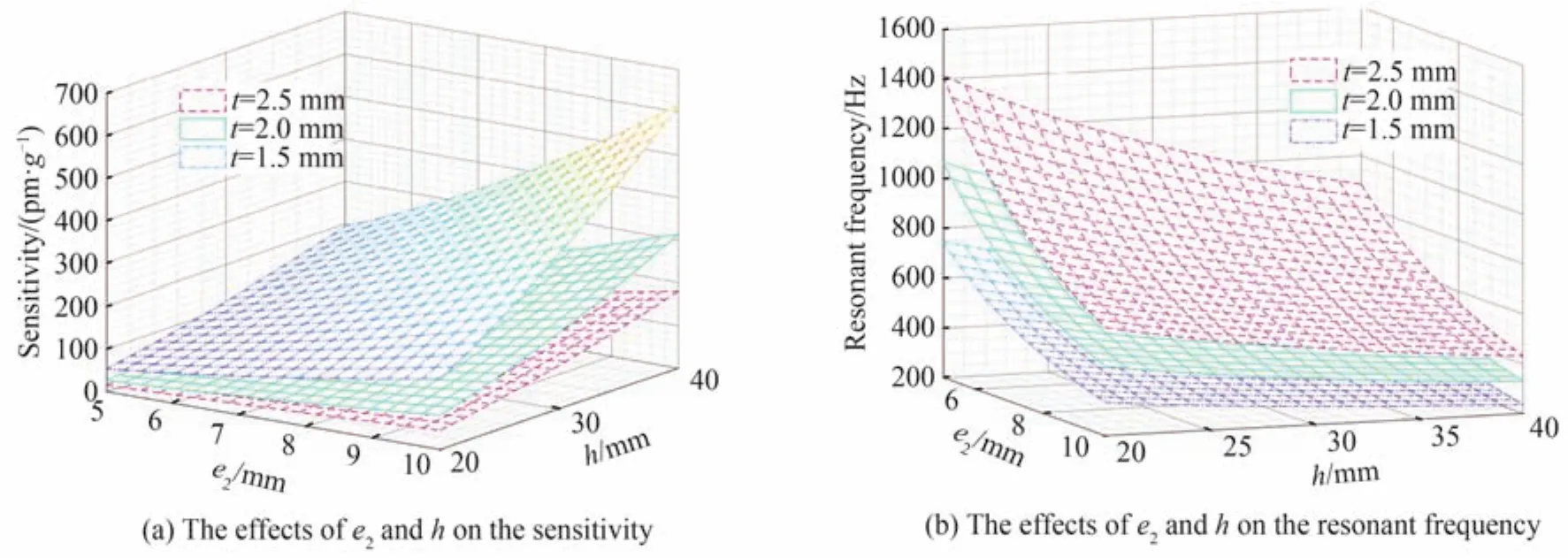
图3 质量块半椭圆短轴长度e2和高度h对传感器灵敏度和谐振频率的影响Fig.3 The effects of e2 and h on the sensitivity and resonant frequency of the sensor
由图3可知,不同铰链厚度的情况下,质量块高度和半椭圆短轴长度对传感器谐振频率和灵敏度有较大影响,当h与e2越大时质量块质量越大,传感器灵敏度越高,谐振频率越小。随着铰链厚度t的变大,谐振频率变大,传感器灵敏度变小。
分析直圆摆线柔性铰链参数c与t对传感器灵敏度以及谐振频率的影响。令柔性铰链参数1 mm≤c≤3 mm,铰链厚度t分别取1.5 mm、2 mm和2.5 mm,质量块高度h=30 mm,质量块半椭圆短轴长度e2=7 mm,模拟结果如图4所示。
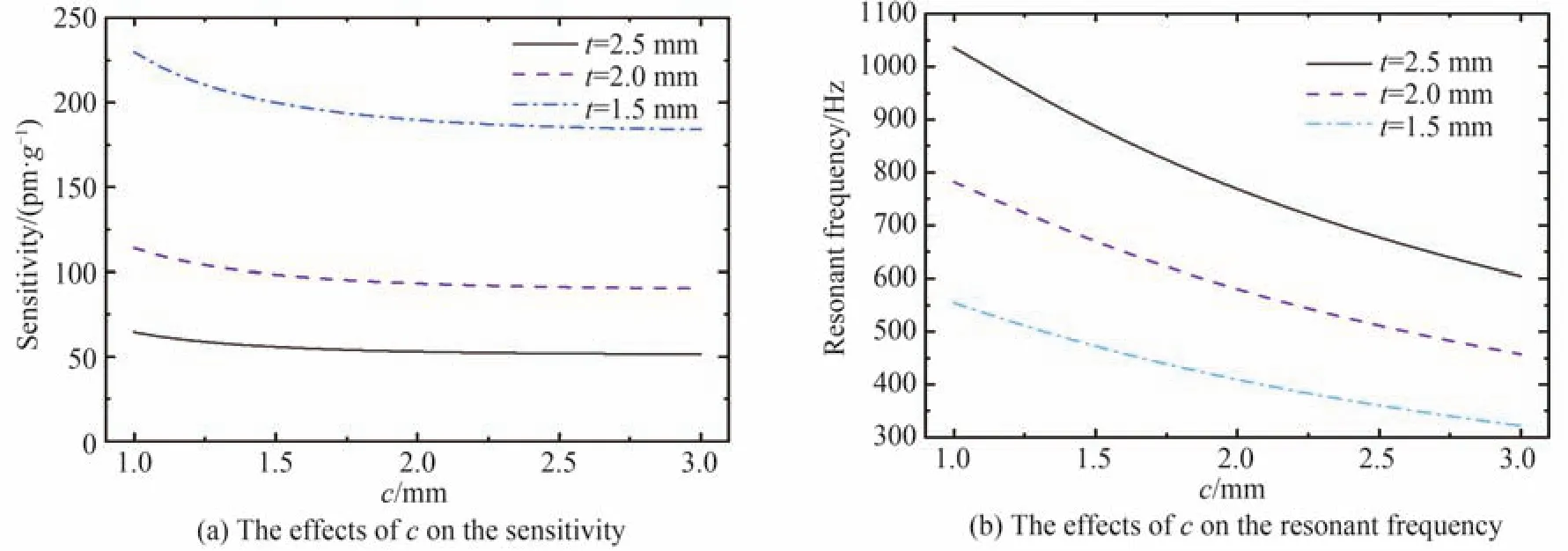
图4 直圆摆线柔性铰链参数c与t对传感器灵敏度和谐振频率的影响Fig.4 The effects of hinge parameter c and t on the sensitivity and resonant frequency of the sensor
光纤粘贴点之间距离l与c有关,即l=2πc,由图4可以看出,在1 mm到3 mm范围内c变大时,传感器灵敏度与谐振频率均变小。铰链厚度t越大,传感器灵敏度越小,谐振频率越高。
2.2 结构仿真
根据图3,图4可以知道,改变传感器参数c、t、e2、h会对传感器灵敏度以及谐振频率产生一定的影响,根据实际桥梁上加速度传感器原位校准的需要,需要传感器谐振频率大于500 Hz,灵敏度不小于50 pm/g。同时考虑到光纤光栅长度限制、实物加工难度以及实际传感器质量与尺寸的要求,传感器参数最终选取c=1.909 8 mm,t=1.4 mm,e2=6 mm,h=24 mm。对结构进行模态分析与谐响应分析,仿真分析模型各项参数如表1所示。

表1 传感器参数表Table 1 Sensor parameter table
根据表1中参数计算得到传感器理论灵敏度42 pm/g,理论谐振频率471 Hz。
使用SolidWorks进行传感器模型制作,并导入到ANSYS中,设定各项参数后进行一阶模态分析结果如图5(a)所示。同样进行各阶模态分析,得到该传感器模型前4阶模态频率为471.06 Hz、2 878.1 Hz、3 226.7 Hz和9 208.4 Hz,二阶模态频率与一阶模态频率差距较大,该传感器模型的横向抗干扰能力较强。
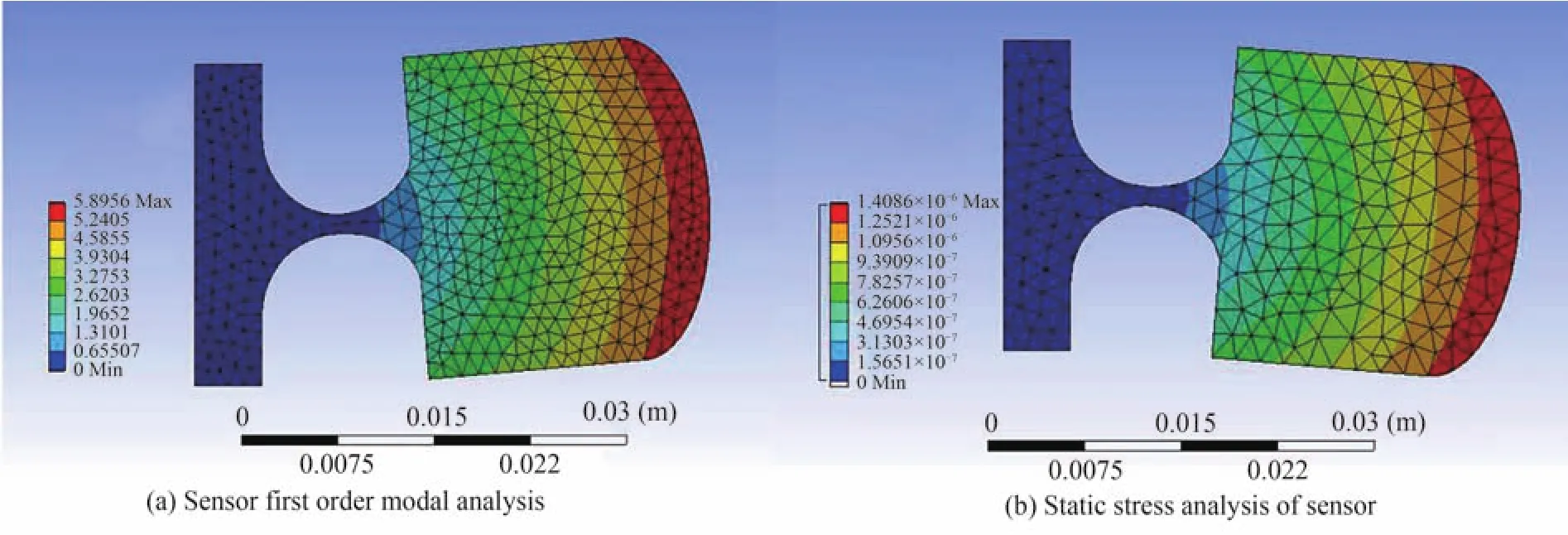
图5 仿真模拟图Fig.5 Simulation diagram
进行静应力时对传感器结构施加一个重力加速度,模拟结果如图5(b)所示,得到在重力加速度下传感器产生的应变为1.4 μm。设置谐响应分析加速度值为4g,分析结果如图6所示,分析结果得到该加速度传感器模型谐振频率为474 Hz。
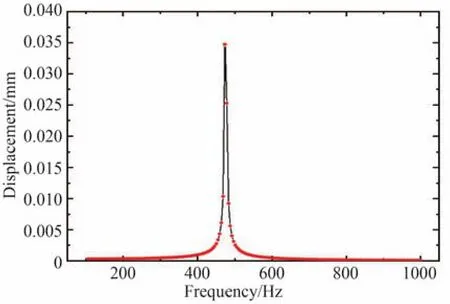
图6 谐响应分析Fig.6 Harmonic response analysis
3 传感器标定结果与分析
3.1 传感器标定方法
校准系统的硬件部分由光源,信号发生器,信号放大器,光纤光栅解调设备,电脑,激振台组成,如图7所示。通过信号发生器产生正弦振动信号,信号频率为40 Hz,输入信号电压为1 V,激振器最大范围20 N,最大位移±4 mm。压电加速度传感器灵敏度为49.7 mV/ms-2,压电式加速度传感器通过数据采集器(XL3208S)获取数据,采样频率最高为128 kHz,采样时间为2 s,Bayspec高速解调仪采样频率为2 000 Hz,采样时间为2 s。将传感器用特定支架安装在振动台上,振动台设定一定振动频率与加速度,使用光纤光栅动态解调仪进行信号采集并在计算机上实时记录,保存数据并进行分析获得传感器灵敏度与谐振频率参数。
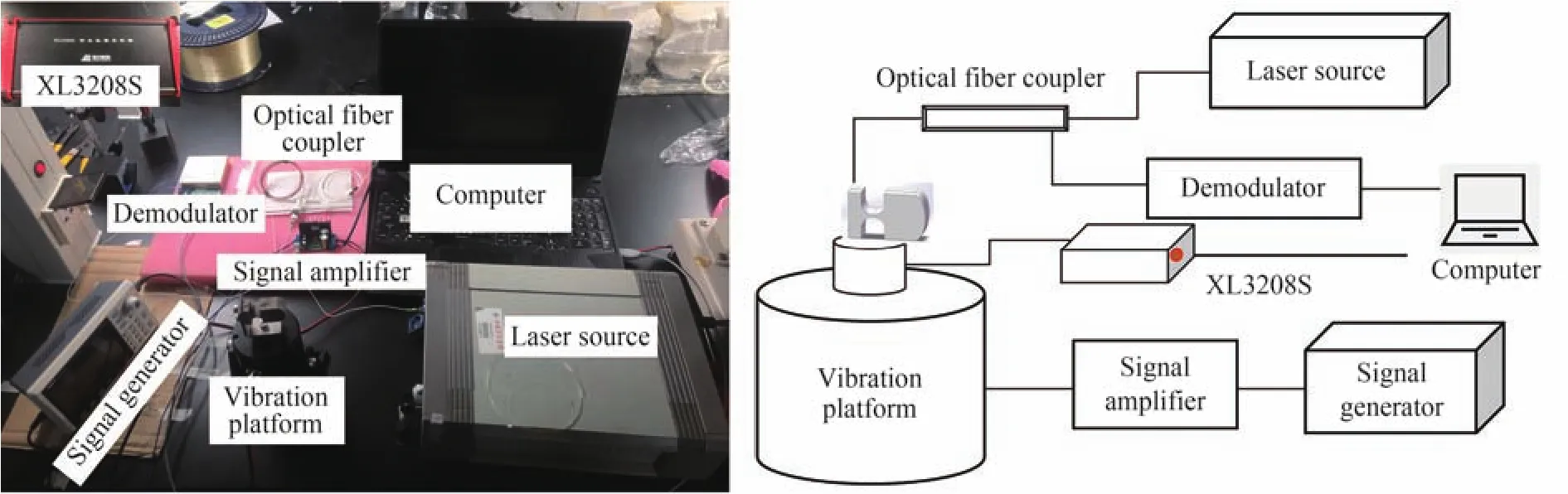
图7 传感器标定系统Fig.7 The system of sensor calibration
将FBG加速度传感器与压电式加速度传感器放置在振动台同一位置,给予相同的振动激励,改变信号发生器输入电压控制振动台振动信号变化,通过压电传感器灵敏度和得到的幅值数据U计算振动加速度,与FBG加速度传感器得到的波长漂移值对FBG加速度传感器灵敏度进行标定。
最后得到FBG加速度传感器灵敏度计算公式为
式中,S2是FBG加速度传感器灵敏度;S1是压电加速度传感器灵敏度;U是压电加速度传感器输出电压;Δλ是FBG加速度传感器中心波长变化量。
标定系统设定振动频率为30 Hz,信号发生器设置信号电压为0.4 V,FBG加速度传感器响应的时域曲线如图8所示。由图8可知,传感器接收外界振动时,同一根光纤上的两个FBG在传感器振动时产生的波长漂移量大小相同,方向相反。
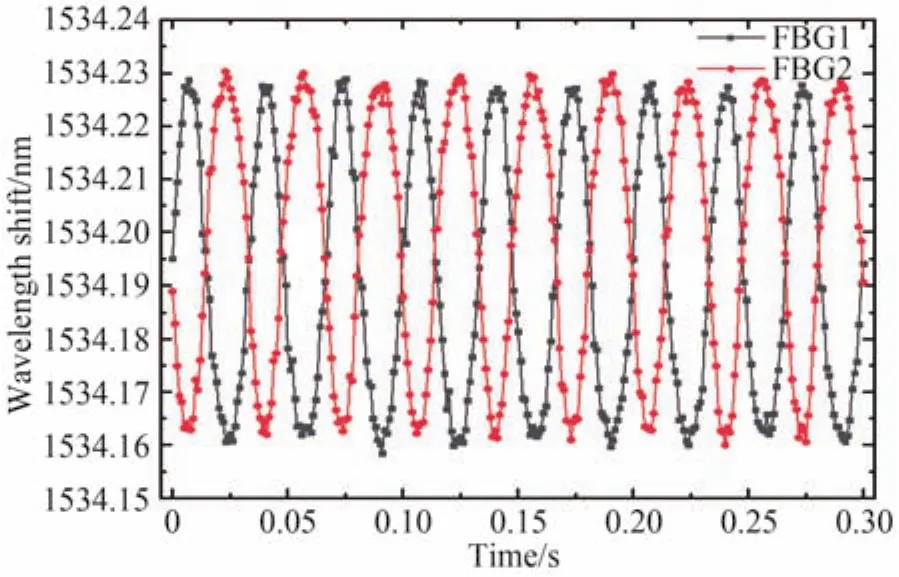
图8 传感器时域曲线Fig.8 The time domain curve of sensor
3.2 频率响应分析
频率响应是决定传感器工作范围的重要参数,信号发生器设置信号电压为1 V,从10 Hz开始进行振动测试,到650 Hz结束,记录波长变化量,结果如图9所示。测试结果表明,传感器在振动频率在460 Hz附近波长变化量最大,在10~250 Hz波长变化较为平稳,在有限元仿真中对传感器谐振频率的模拟没有考虑到光纤以及实际加工精度的影响,最终谐振频率结果与模拟结果有一定的差距。
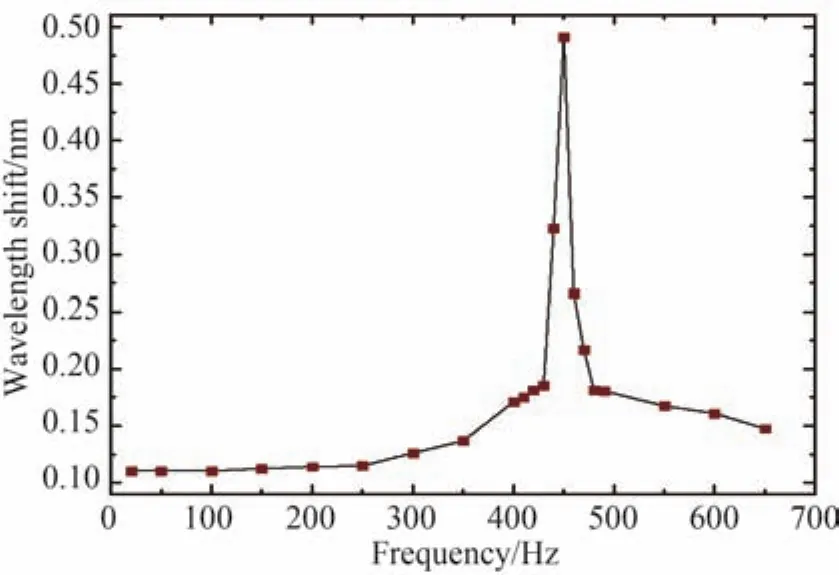
图9 传感器频率响应曲线Fig.9 The frequency response curve of sensor
3.3 灵敏度分析
灵敏度是决定传感器测量精度的重要参数,振动台设置恒定频率30 Hz和60 Hz作为模拟桥梁现场的测试频率,30 Hz测试时电压值从0.2 V开始增加到0.9 V,步长为0.1 V。60 Hz测试时电压值从0.2 V开始增加到0.7 V,步长为0.1 V。记录波长变化量随着加速度值的变化,并通过比较法计算出光纤光栅加速度传感器灵敏度,绘制灵敏度曲线如图10所示。
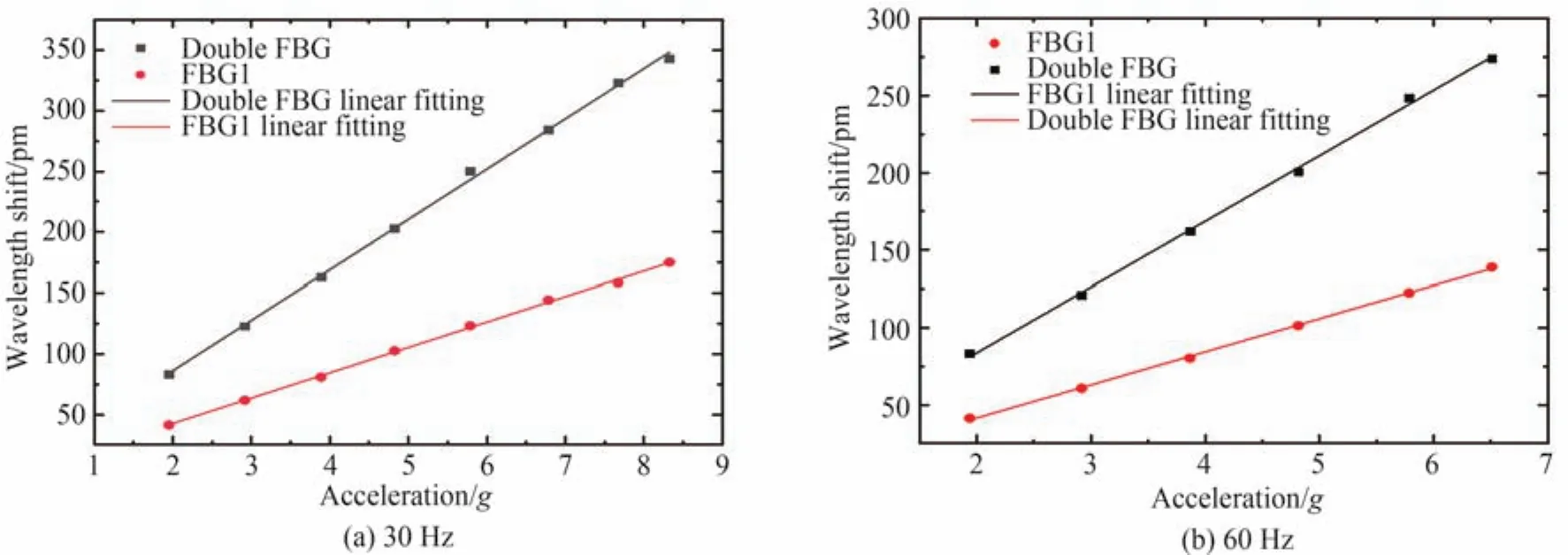
图10 传感器灵敏度曲线Fig.10 The sensitivity curve of sensor
测试结果表明,频率30 Hz时传感器双FBG灵敏度为43.14 pm/g,拟合系数为0.995 7;传感器单FBG1灵敏度为21.74 pm/g,拟合系数为0.997 7。频率60 Hz时双FBG灵敏度为43.21 pm/g,拟合系数为0.992 8;传感器单FBG1灵敏度为21.81 pm/g,拟合系数为0.998 9。实验表明传感器波长变化与加速度变化之间有良好的线性关系,实际传感器灵敏度约为43 pm/g。
表2为本文设计制作的传感器与其余文献传感器的对比,本文传感器在各项参数满足桥梁加速度监测的前提下,相比较与其他FBG加速度传感器,体积较小,有较高的集成度,使用椭圆与矩形相结合的质量块结构,可以将双光纤光栅刻于一根光纤上,便于波长数据采集。
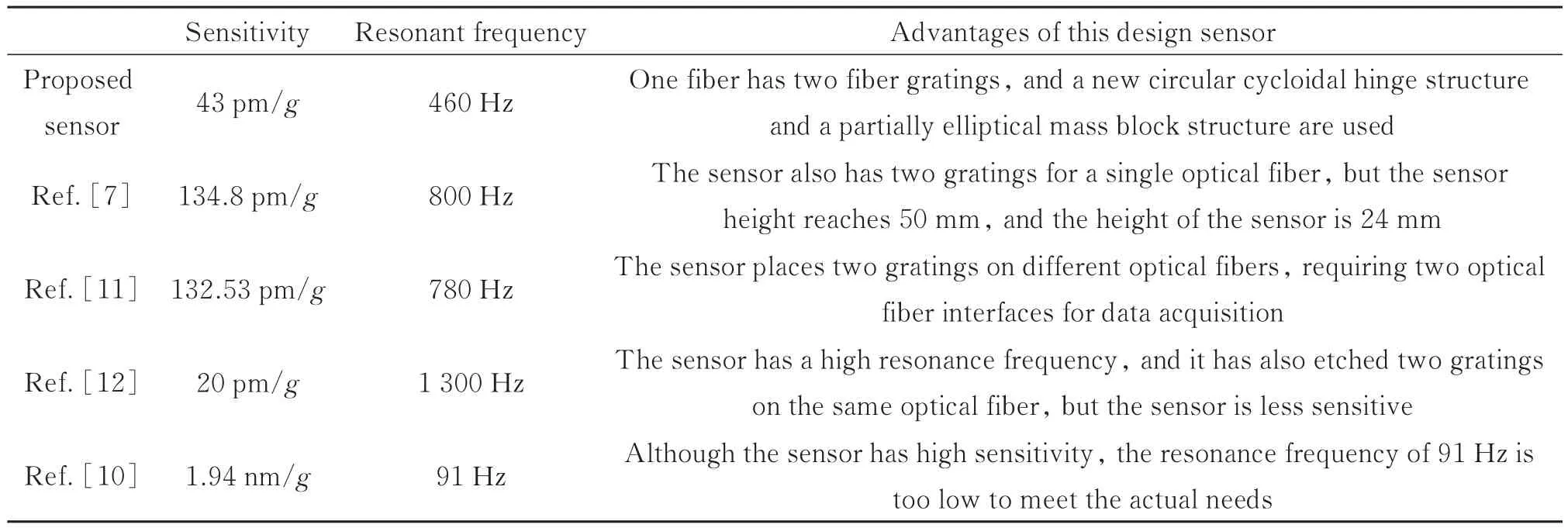
表2 本文传感器与其余文献数据对比Table 2 Comparison between the sensor in this paper and other literature data
3.4 横向抗干扰能力分析
横向抗干扰能力是传感器对是否能适应复杂环境的一项重要参数。振动台设置振动频率为50 Hz,信号发生器输入电压为0.3 V。将加速度传感器测试方向与铰链振动方向垂直进行安装,测试结果如图11所示。
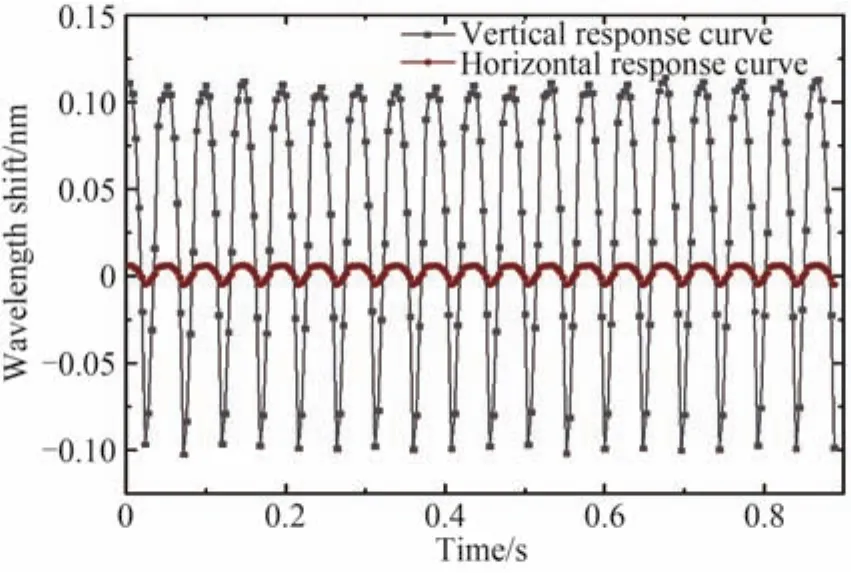
图11 传感器横向抗干扰测试Fig.11 The transverse anti-jamming test of sensor
测试结果表明,当传感器进行垂直于铰链振动方向的振动传感时,传感器灵敏度为2.456 pm/g,远小于铰链振动方向的灵敏度,得到该传感器横向干扰度约为5.7%,即该加速度传感器有较好的横向抗干扰能力。
4 结论
对于桥梁与建筑物振动传感问题,本文提出了一种基于圆弧摆线的双光纤光栅加速度传感器。根据数学计算以及程序模拟得到传感器各项参数与灵敏度和谐振频率之间的关系,并根据桥梁现场测量要求进行了传感器结构的优化。实际传感器测试分析表明,该传感器灵敏度约为43 pm/g,固有谐振频率460 Hz,并且具有良好的横向抗干扰性能,对于桥梁相关的加速度检测提供了新选择。
