变工况下半主动悬置系统滑模控制特性分析
2023-07-12张明亮潘道远
张明亮,李 祥,李 岚,潘道远
(1.安徽工程大学 机械工程学院,安徽 芜湖 241000;2.亚新科噪声与振动技术(安徽)有限公司,安徽 宁国 242300)
0 引言
随着生活水平的不断提高,人们对车辆的NVH性能有了更高要求。发动机半主动悬置系统具有结构简单,成本低、能耗少等优点,得到学术界越来越多的关注[1-3]。邓召学等[4]设计了一种基于流动模式的磁流变悬置,并在启停工况下进行了隔振性能试验,改善了车辆的平顺性。针对混合动力汽车启停时产生的扭矩突变,王道勇等[5]基于悬置系统的设计方法开发了一种半主动阻尼拉杆用于减小发动机启停时的振动。为了提高发动机半主动悬置系统的隔振性能,申玉瑞等[6]提出了一种PID控制方法,并利用改进果蝇优化算法对控制参数进行优化。潘道远等[7]提出了一种SOA优化PID控制方法,结果表明系统采用该方法后具有良好的隔振效果。但以上控制方法均存在应用工况单一、抗干扰能力较差等问题。
滑模控制在受到参数摄动和外部干扰时具有不变性,在工程领域应用较为广泛[8]。支敬德等[9]提出了一种模糊滑模控制用于挠性航天器姿态机动控制,仿真结果表明该控制方法能够有效抑制附件的抖振。吕振鹏等[10]设计了一种滑模控制器用于汽车半主动座椅悬架控制,仿真结果表明该控制方法具有良好的隔振效果。为了精确控制空气悬架的高度,尹航等[11]提出了一种基于双死区设计的滑模控制方法,并通过仿真验证了控制策略的有效性。滑模控制在车辆悬架系统中的应用日趋成熟[12-14],而在发动机悬置系统中的应用鲜有研究报道,这是因为发动机悬置系统的激励频率高、振幅小,且设计空间较小等因素造成。汽车芯片的飞速发展,为滑模控制在发动机悬置系统中的应用提供了可能性。
基于此,本文建立1/4半主动悬置系统力学模型,引入误差动力学模型进行滑模控制器的设计。考虑车辆在行驶过程中切换挡位以及加减速等变工况的影响,建立半主动悬置系统仿真模型验证滑模控制的有效性,为滑模控制在半主动悬置系统中的应用提供理论基础。
1 半主动悬置系统建模
1.1 悬置系统力学模型
由于半主动悬置系统是一个非线性时变的复杂系统,为了简化求解过程和降低计算量,建立1/4半主动悬置系统力学模型用于控制研究,如图1所示。图1中:me和mb分别为发动机等效质量和车身等效质量,k1和k2分别为半主动悬置等效刚度和悬架等效刚度,ce和cb分别为半主动悬置等效阻尼和悬架等效阻尼,z1和z2分别为发动机位移和车身位移,fe为发动机激励,fc为半主动悬置的可控阻尼力。
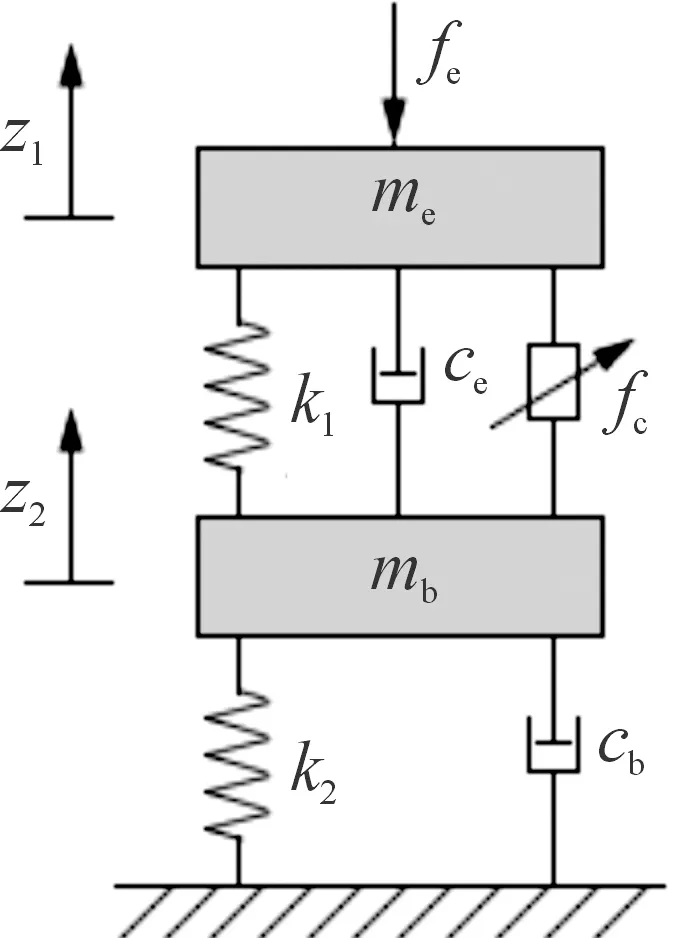
图1 半主动悬置系统力学模型
根据牛顿第二定律对图1中me和mb进行受力分析,定义垂直向上方向为正方向,得到系统动力学方程为
(1)
(2)

(3)
式中:X为状态变量;A为状态矩阵;B为输入矩阵;U为控制矩阵;E为扰动输出矩阵;W为扰动输入矩阵;C为输出矩阵;D为状态反馈矩阵。
整理得到各矩阵分别为
W=[fe],U=[fc]
1.2 天棚阻尼参考模型
Karnopp教授于20世纪70年代初提出天棚控制理论。天棚控制是一种主动控制策略,其控制性能优越,具有良好的鲁棒性。为获取理想的输出响应,采用一种改进的天棚阻尼悬置系统作为参考模型,如图2所示。图2中:csr和ctr分别是天棚阻尼参考模型的阻尼系数,z1r和z2r分别是天棚阻尼参考模型中发动机和车身的位移。
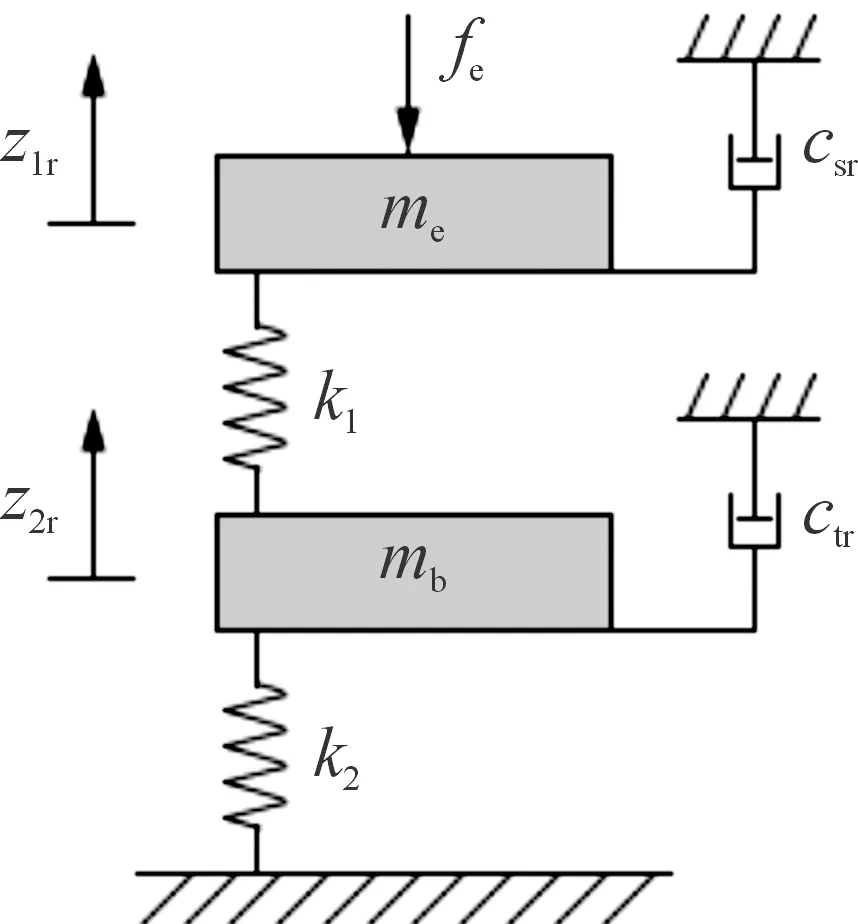
图2 天棚阻尼参考模型
根据牛顿第二定律,得到天棚阻尼参考模型的动力学方程为
(4)
(5)
Xr=ArXr+BrW
(6)
其中,
W=[fe]
2 滑模控制器设计
基于天棚阻尼参考模型的滑模控制器设计的主要思路是:以理想天棚阻尼控制系统作为参考模型,在实际被控系统与参考模型系统之间建立误差动力学模型,然后设计相应的切换函数和变结构控制律,使系统状态轨迹在有限时间内到达所设计的切换面,实现系统滑动模态运动和渐近稳定性。
2.1 误差动力学模型
根据建立的半主动悬置系统力学模型和天棚阻尼参考模型,定义发动机速度误差、位移误差和位移误差的积分为广义误差矢量,即
(7)
(8)
由式(3)、式(6)和式(8)整理,得到误差动力学方程为
(9)
其中,
2.2 滑模输出阻尼力
滑模运动必须渐近稳定,并且所有控制点在进入滑模切换平面的过程中应具有良好的动态品质。实现对误差矢量进行滑模变结构控制,通过建立的误差动力学方程,采用极点配置方法设计的滑模面为
s=Ce
(10)
式中:s为滑模面;C=[1c1c2]为系数矩阵;e为状态变量矩阵。则滑模面导数为
(11)
滑动模态的运动微分方程为
C(s)=c2+c1s+s2
(12)
式中:c1和c2采用极点配置方法求得。

u=-(CGe)-1(CAee+CBeX+CHeXr)
(13)
根据式(3)、式(6)和式(13)整理可得
u=c2mek1(z1-z1r)+k1(z2-z2r)·
(14)
滑模控制的存在性和可达性条件为
(15)
在满足式(15)的条件下,为改善滑模运动的品质问题,可采用等速趋近律
s=-φsgn(s),φ>0
(16)
其中,趋近律中的代表系统运动点趋近切换面的速率。选取合理的值可以加速趋近的过程,降低系统抖振。因此,得到的滑模控制器可控制阻尼力为
fc=u+φsgn(s)
(17)
对于半主动悬置系统,具有被动约束条件的可控阻尼力为

(18)
3 半主动悬置系统仿真模型
3.1 仿真模型建立
根据滑模控制理论,建立的基于天棚阻尼参考模型的半主动悬置系统滑模控制结构如图3所示。
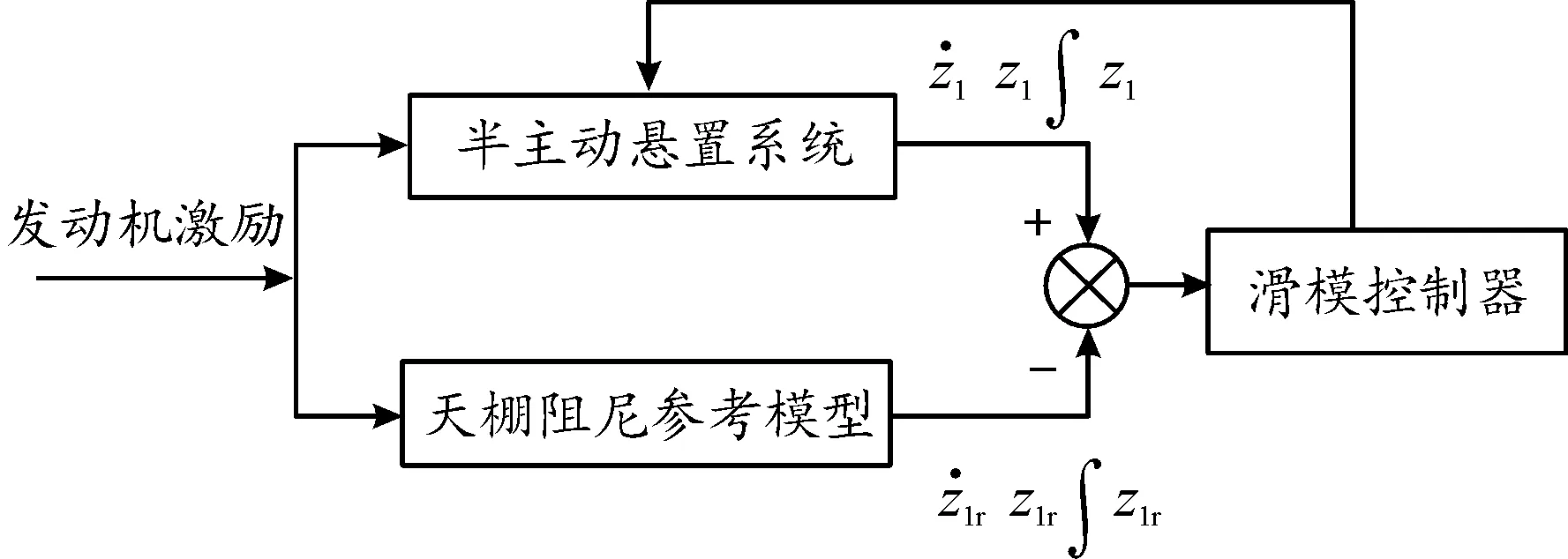
图3 滑模控制结构示意图
天棚阻尼参考模型是在理想固定端分别与发动机和车身之间添加天棚阻尼系数。天棚阻尼系数的选取对滑模控制器的控制性能有着非常重要的影响。以悬置系统二自由度力学模型为研究对象,在发动机激励作用下计算出天棚阻尼参考模型中发动机加速度和悬置动挠度的峰值拟合曲线如图4所示。天棚阻尼系数选取初始值为2 000 N·s/m、终止值为3 500 N·s/m、步长为250 N·s/m。由图4可知,天棚阻尼系数小于3 000 N·s/m时,发动机加速度和悬置动挠度的峰值均随天棚阻尼系数的增加而减小;而大于3 000 N·s/m时,发动机加速度和悬置动挠度的峰值变化不大。考虑发动机加速度和悬置动挠度峰值拟合曲线的变化规律,天棚阻尼系数ctr和csr均选择为 3 000 N·s/m。
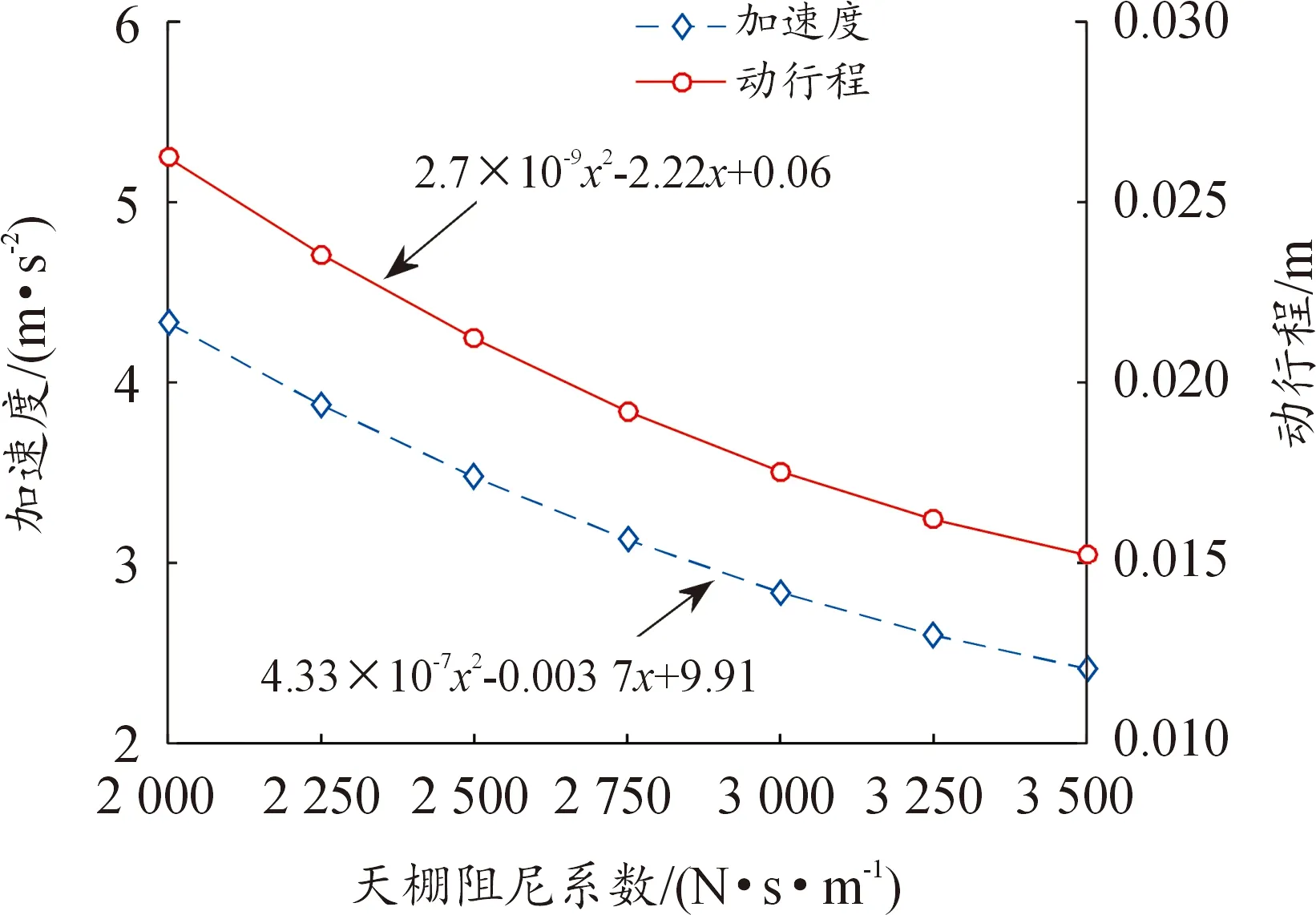
图4 峰值拟合曲线
滑模控制是一种变结构控制,具有对外部的干扰不敏感性,适用于有扰动的非线性系统,具有良好的鲁棒性。滑模控制存在抖振,对系统的切换控制项选取等速趋近律式(16),其中的切换系数对悬置系统的动态特性和抖振产生影响,可以通过试凑法,合理选择控制参数为0.01,实现改善悬置系统的动态特性和降低抖振的目的。仿真模型参数值如表1所示。
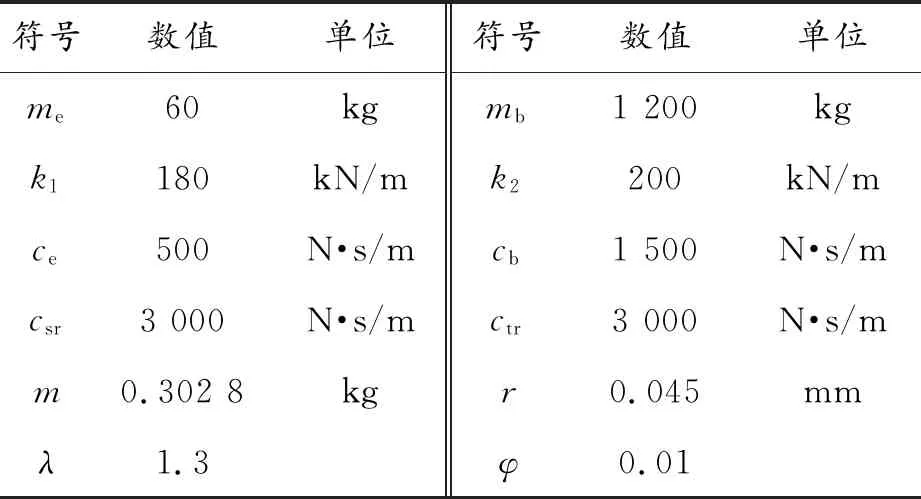
表1 仿真模型参数值
为了验证基于天棚阻尼参考模型的滑模控制器的控制性能,在Matlab/Simulink平台建立1/4半主动悬置系统仿真模型,如图5所示。图5中:fe为发动机激励,fc为可控阻尼力,z1和z2分别为半主动悬置系统中发动机和车身位移,z1r和z2r分别为天棚阻尼参考模型中发动机和车身位移,ea为发动机加速度,mdd为悬置动挠度。
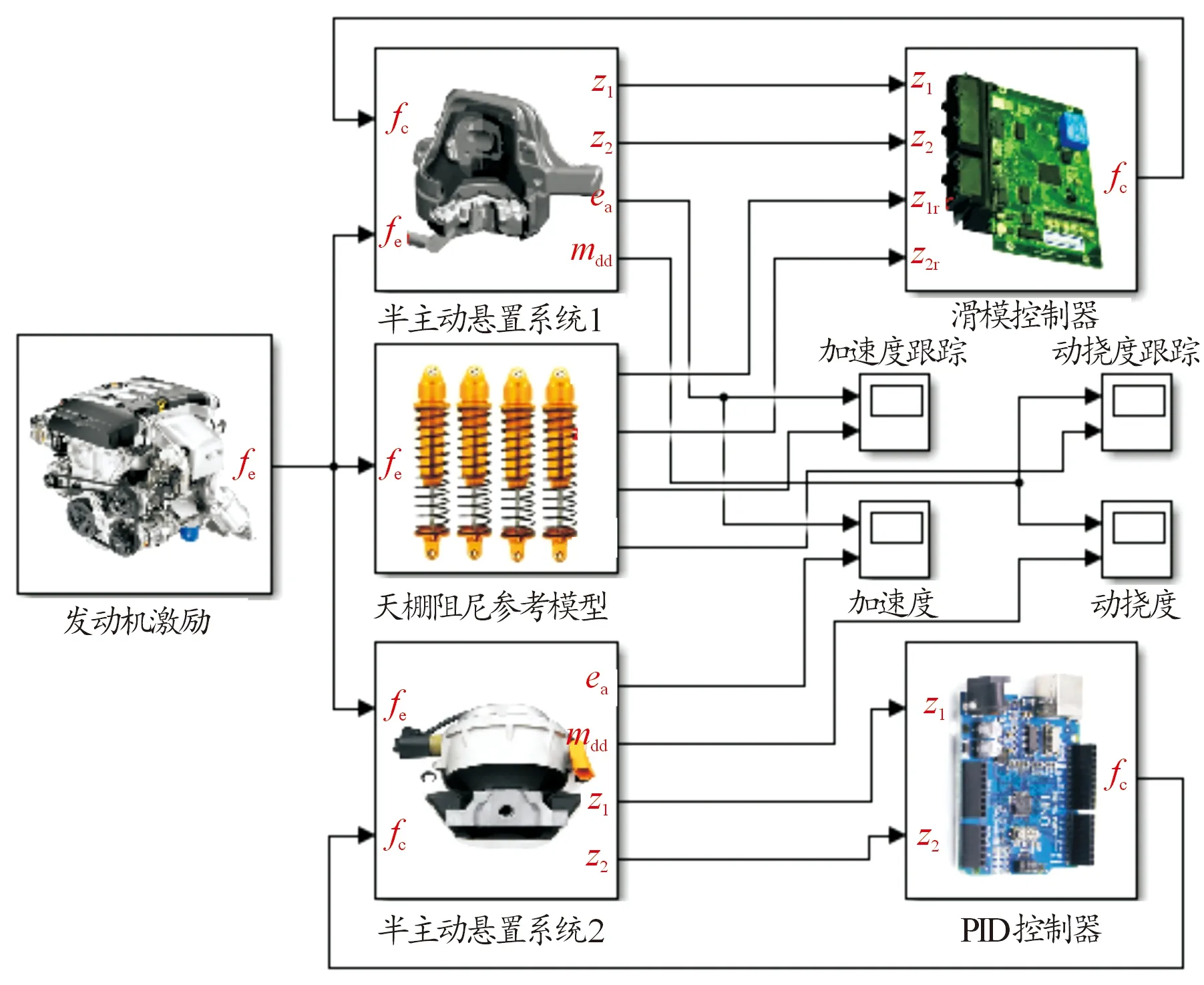
图5 半主动悬置系统仿真模型
3.2 仿真结果分析
在发动机半主动悬置系统中,振动激励分为内部激励和外部激励。内部激励主要来自发动机,而外部激励主要来自路面。由于悬架的减振作用,外部激励对半主动悬置系统影响相对较小。内部激励主要由发动机气缸内的燃气压力和活塞往复运动产生的不平衡惯性力与扭矩等造成,然后通过悬置元件传递到车身,激励着车辆不断的产生振动。多缸发动机激励一般可以等效为几个单缸发动机激励叠加而成。常用直列四缸发动机在垂直方向激励为:
fe=-4mrλω2cos2ωt
(19)
式中:m为往复运动活塞的质量;r为曲柄回转半径;λ为曲柄回转半径与连杆长度的比值;ω为发动机曲柄角速度;t为时间。直列四缸发动机为偶数缸发动机,各缸的一阶往复惯性力和旋转惯性力因相互平衡而抵消。图6为发动机在变工况下输出的垂直方向激励,(a)和(b)分别为汽车升降挡时发动机输出的激励,(c)和(d)分别为汽车加减速时发动机输出的激励。
基于天棚阻尼参考模型的滑模控制,需要适当调节半主动悬置输出的可控阻尼力,使控制模型中的车身的运动特征和天棚阻尼参考模型中的等效质量运动特征一致。发动机加速度和悬置动挠度分别在滑模控制和天棚阻尼控制下的对比如图7和图8所示。由图7和图8可以看出,设计的滑模控制器具有很好的跟踪效果,验证了基于天棚阻尼参考模型的滑模控制在半主动悬置系统中的可靠性。
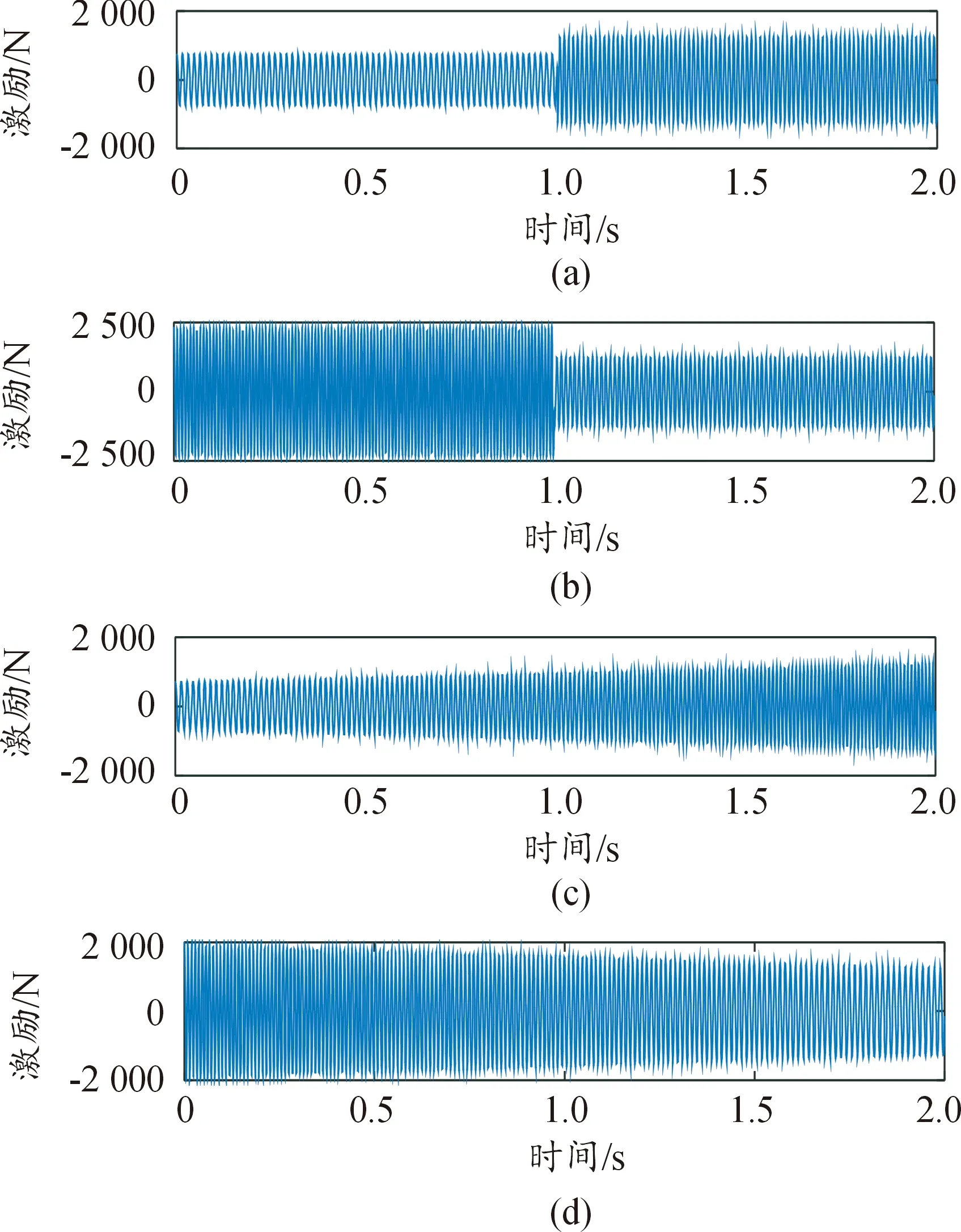
图6 发动机变工况下激励
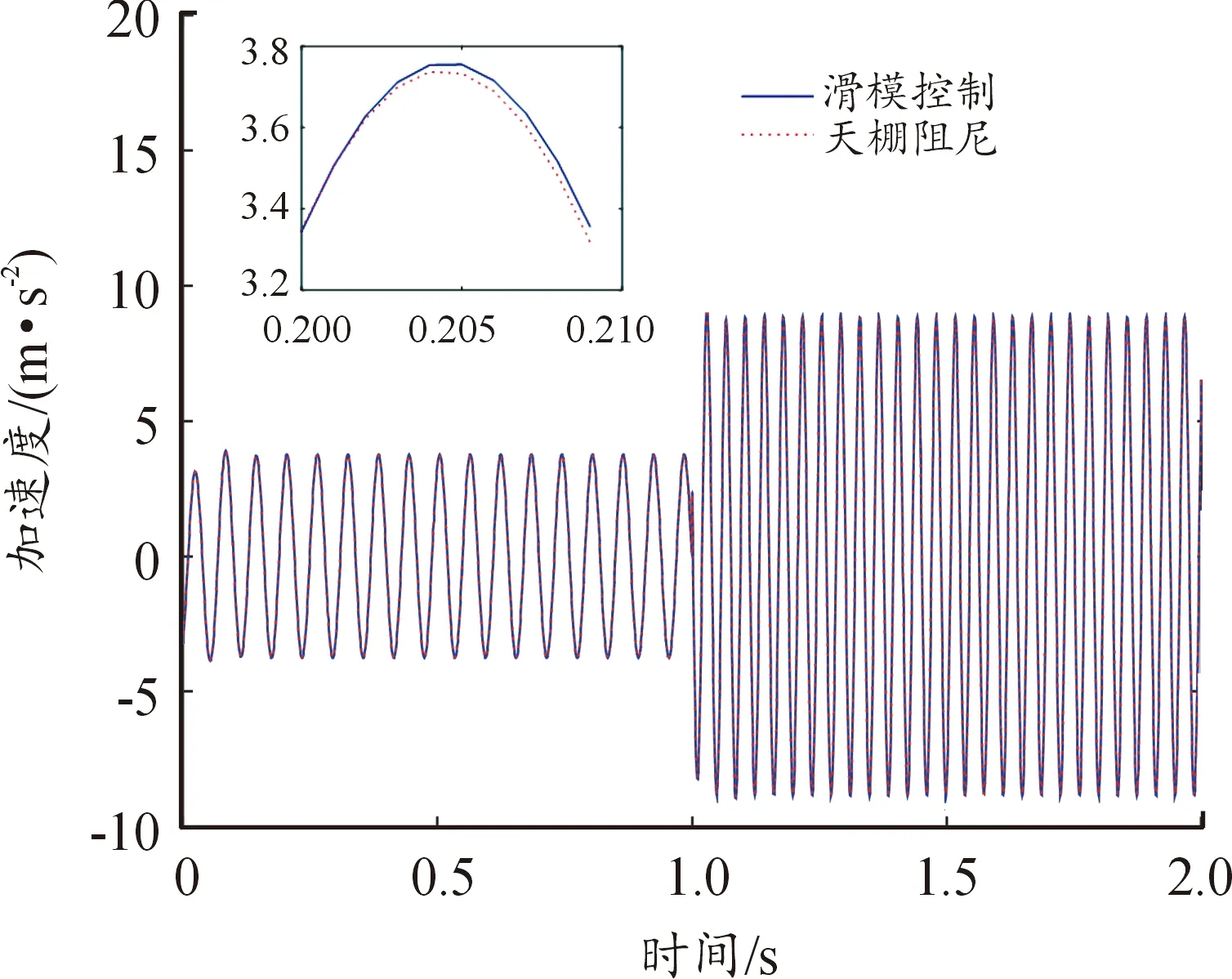
图7 发动机加速度
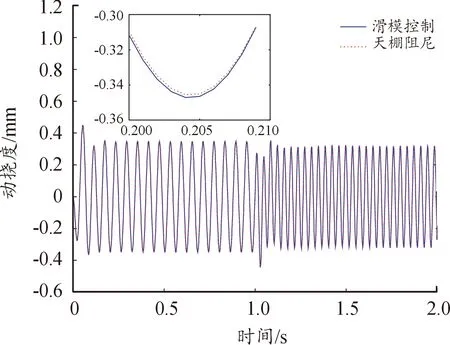
图8 悬置动挠度
汽车换挡时,发动机加速度和悬置动挠度分别在PID控制和基于天棚阻尼参考模型的滑模控制系统作用下的对比如图9所示。由图9(a)可知,发动机加速度峰值在减挡前为69.9 m/s2,采用滑模控制后为58.73 m/s2,降幅为15.98%,在减挡稳定后为34.82 m/s2,采用滑模控制后为20.24 m/s2,降幅为41.87%。由图9(b)可知,悬置动挠度峰值在减挡前为0.249 5 mm,采用滑模控制后为0.237 3 mm,降幅为4.89%;在减挡后为0.246 3 mm,采用滑模控制后为0.187 8 mm,降幅为23.75%;悬置动挠度峰值采用PID控制时稳定时间为1.58 s,而采用滑模控制后为1.14 s。半主动悬置系统在采用基于天棚阻尼参考模型的滑模控制后,发动机加速度和悬置动挠度在不同挡位切换工况下能得到更好的抑制,系统趋于稳定的时间更短。
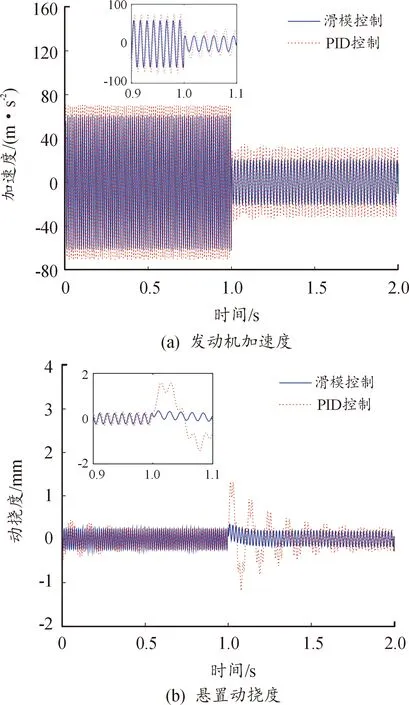
图9 汽车升挡时系统动态特性
汽车改变车速时,发动机加速度和悬置动挠度分别在PID控制和基于天棚阻尼参考模型的滑模控制系统作用下的对比如图10所示。由图10(a)可知,发动机加速度峰值在车速100 km/h时为77.05 m/s2,采用滑模控制后为74.4 m/s2,降幅为3.44%;在车速80 km/h为48.08 m/s2,采用滑模控制后为29.78 m/s2,降幅为38.06%。由图10(b)可知,悬置动挠度峰值在车速100 km/h时为0.291 3 mm,采用滑模控制后为0.251 1 mm,降幅为13.8%;在车速80 km/h为0.480 5 mm,采用滑模控制后为0.301 2 mm,降幅为37.32%。随着车速的逐渐降低,滑模控制下的半主动悬置系统的减振性能逐渐上升,而悬置动挠度有所增加,这是因为车辆性能指标之间存在矛盾。半主动悬置系统在采用基于天棚阻尼参考模型的滑模控制后,发动机加速度和悬置动挠度在车速切换工况下能得到更好的抑制。
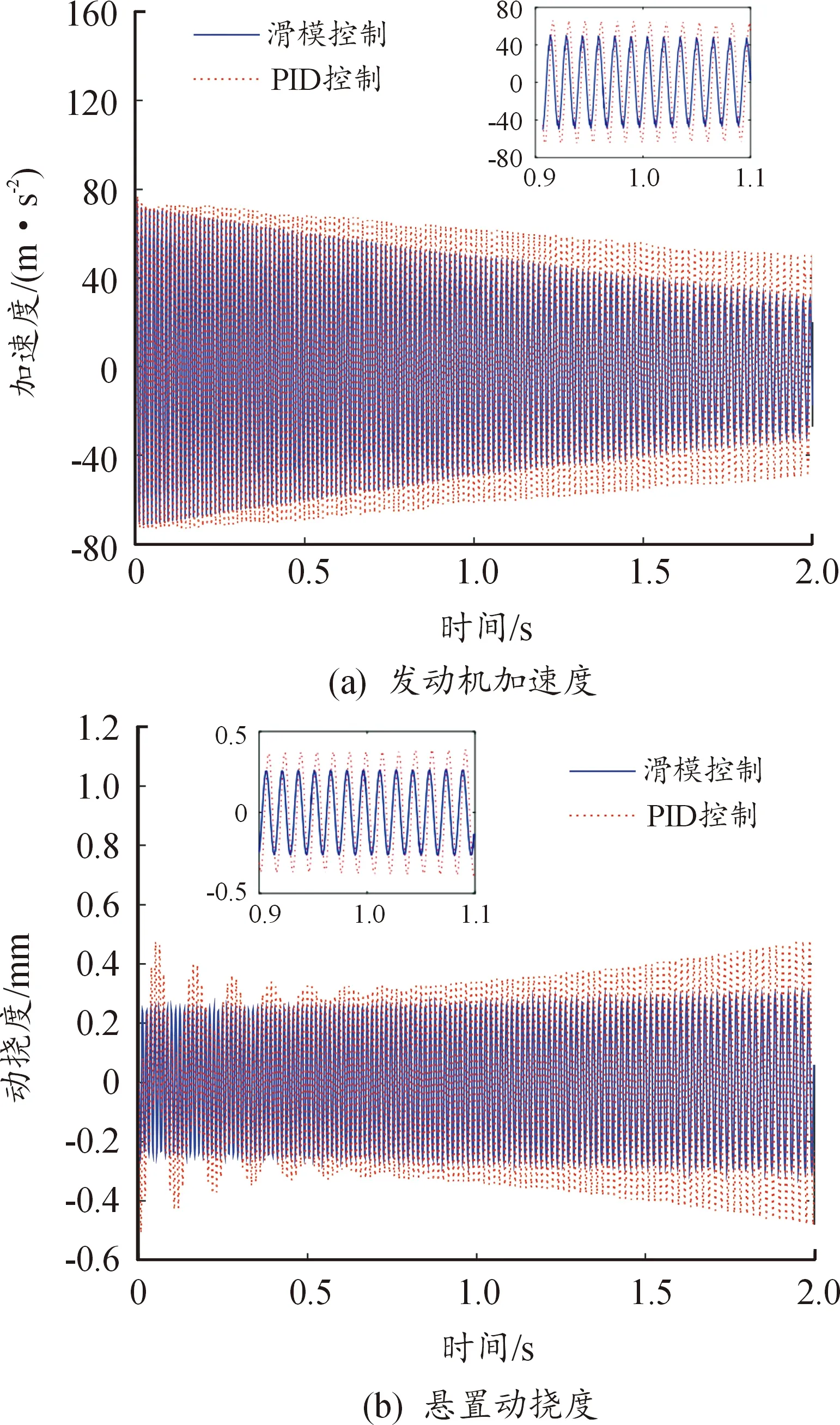
图10 汽车减速时系统动态特性
为了深入探讨变工况下滑模控制器的控制性能,结合表2中的各挡位车速与发动机转速的对应关系[16],改变半主动悬置系统仿真模型的系统参数进行仿真研究。
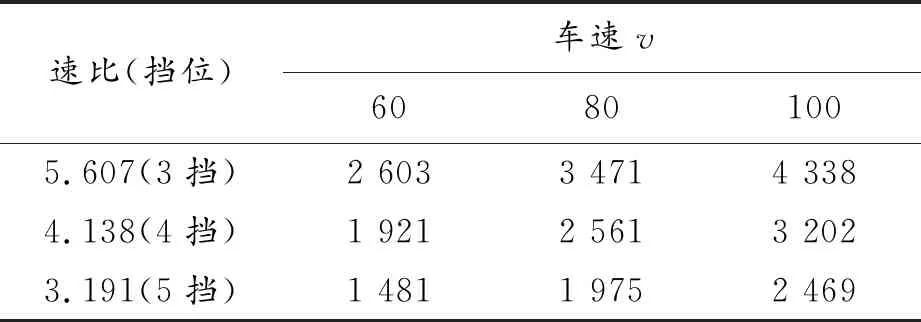
表2 各挡位车速与发动机转速的对应关系 km/h
为了更直观地反映半主动悬置系统在应用滑模控制器后隔振性能的改善程度,以发动机加速度的均方根值为其评价指标,其计算结果如表3和表4所示。
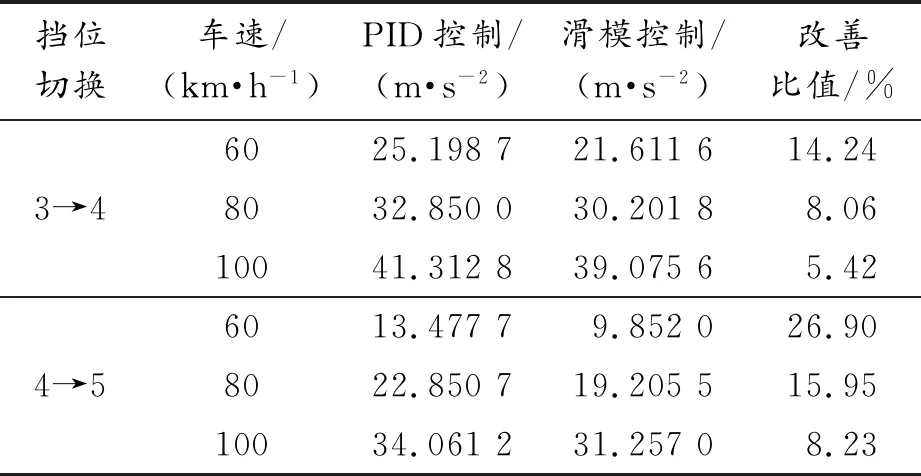
表3 挡位改变时滑模控制对发动机振动的影响
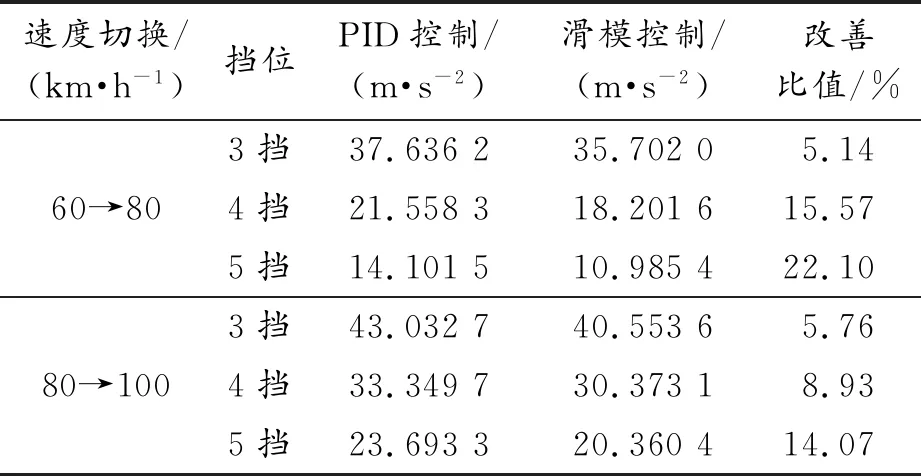
表4 车速改变时滑模控制对发动机振动的影响
由表3可知,挡位由3挡切换到4挡时,随着车速上升,PID控制的发动机加速度由25.198 7 m/s2增加到41.312 8 m/s2,半主动悬置系统应用滑模控制后,发动机加速度由21.611 6 m/s2增加到39.075 6 m/s2,隔振性能改善比值由14.24%降低到5.42%。挡位由4挡切换到5挡时,随着车速上升,PID控制的发动机加速度由13.477 7 m/s2增加到34.061 2 m/s2,半主动悬置系统应用滑模控制后,其发动机加速度由9.852 m/s2增加到31.257 m/s2,隔振性能改善比值由26.9%降低到8.23%。在相同挡位切换工况下,随着车速上升,滑模控制改善半主动悬置系统隔振性能的效果随之下降。
由表4可知,车速由60 km/h切换到80 km/h时,随着挡位上升,PID控制的发动机加速度由37.636 2 m/s2下降到14.101 5 m/s2,半主动悬置系统应用滑模控制后,其发动机加速度由35.702 m/s2下降到10.985 4 m/s2,隔振性能改善比值由5.14%上升到22.1%。车速由80 km/h切换到100 km/h时,随着挡位上升,PID控制的发动机加速度由43.032 7 m/s2下降到23.693 3 m/s2,半主动悬置系统应用滑模控制后,其发动机加速度由40.553 6 m/s2下降到20.360 4 m/s2,隔振性能改善比值由5.76%上升到14.07%。在相同车速切换工况下,随着挡位上升,滑模控制改善半主动悬置系统隔振性能的效果随之上升。
4 结论
为研究变工况条件下滑模控制对半主动悬置系统隔振性能的影响,设计一种基于天棚阻尼参考模型的滑模控制器,并在Matlab/Simulink平台建立其仿真模型。仿真结果表明:设计的滑模控制器具有很好的跟踪效果,验证了基于天棚阻尼参考模型的滑模控制在半主动悬置系统中的可靠性;半主动悬置系统在采用基于天棚阻尼参考模型的滑模控制后,发动机加速度和悬置动挠度在挡位、车速切换工况下都能得到更好的抑制,系统趋于稳定的时间更短。为了深入探讨变工况下滑模控制器的控制性能,结合各挡位车速与发动机转速的对应关系,对半主动悬置系统隔振性能的改善程度进行了研究。分析结果表明:在相同的挡位切换工况下,随着车速上升,滑模控制改善发动机半主动悬置系统隔振性能随之下降;在相同的车速切换工况下,随着挡位上升,滑模控制改善发动机半主动悬置系统隔振性能随之提高。
