预置舵角对跨介质航行体入水尾拍运动影响试验
2023-07-10刘喜燕袁绪龙罗凯祁晓斌
刘喜燕,袁绪龙,罗凯,祁晓斌
(西北工业大学 航海学院,陕西 西安 710072)
0 引言
跨介质航行体采用空中巡航弹道和反复出入水末段突防弹道相结合的水空一体化攻击弹道,或将成为一种新型高效的反舰武器装备,是未来战争的首选和主导武器。在反复出入水末端突防弹道设计中,入水转平弹道的设计和实现是其关键技术和难点所在。在该段弹道中,航行体会经历入水冲击、空泡形成、发展和溃灭等过程[1]。任何非对称扰动都可能使航行体在高速入水过程中发生尾部拍击空泡壁面的现象,该现象称为尾拍运动[2]。尾拍过程中空泡和航行体之间复杂的相互耦合关系,使得航行体所受的流体动力展现出极强的非定常特性,给跨介质航行体的动力学建模与控制系统设计带来巨大挑战。
目前,国内外学者在航行体尾拍运动方面做了很深入的研究,但主要集中在对称模型受到扰动而形成尾拍运动的研究。Rand等[3]通过建立超空泡航行体尾部拍击空泡壁的动力学模型,分析了尾拍频率随运动参数变化的规律,提出尾拍作用下的航行体基本保持直线运动的结论。Ruzzene等[4-5]通过初步研究建立高速运动的超空泡射弹在空泡内部往复振动的动力学模型,研究了射弹在尾拍撞击作用力下的结构响应问题。魏英杰等[6]综述了目前国内外对尾拍问题研究的进展,分析了尾拍研究中涉及的空泡形态、弹体受力以及动力学建模等问题。赵成功等[7-8]通过建立超空泡射弹平面运动的数值计算方法,研究了射弹在不同参数影响下的空泡形态、尾拍现象和弹道特性。古鉴霄等[9]通过仿真方法研究了典型衡重参数对射弹有效射程的影响规律,给出了超空泡射弹水下弹道具有稳定尾拍现象、尾拍波长和振幅近似恒定的结论。梁景奇等[10-11]通过建立超空泡射弹多自由度运动求解的数值仿真模型,研究射弹受扰动后的尾拍运动特性,分析了初始速度、攻角等因素对射弹尾拍运动的影响。姚忠等[12]通过建立耦合求解流场和射弹运动的非定常仿真模型,研究了初速扰动角速度对高速射弹尾拍过程流体动力特性与弹道特性的影响。王晓辉等[13]通过建立耦合欧拉-拉格朗日(CEL)数值仿真模型,研究射弹伴随尾拍的高速入水过程,获得了射弹尾拍对水动力载荷、弹道运动的影响。
针对非对称模型入水方面的研究尚不多见。王云等[14]通过试验研究不同头型弹体的入水弹道,给出了椭圆斜截头型在一定入水角范围内弹道向上偏转的结论。邵志宇等[15]通过数值模拟和试验研究相结合的方法,对斜截头弹体入水的弹道特性进行了研究,提出了斜截头弹体姿态偏转方程。华扬等[16]通过不同切角头型的航行体入水试验,研究了航行体切角对入水空泡和弹道轨迹的影响。上述研究的主要侧重点是在入水空泡特性与弹道偏转特性方面,尚未对入水转平/偏转过程中尾拍运动特性进行深入研究。陈诚等[17]和时素果等[18]研究了预置舵角下超空泡航行体水平和斜射入水弹道特性。刘如石等[19]研究了尾部形状对超空泡射弹尾拍运动特性的影响。可以看出,目前的研究仅针对非对称外形空化器、尾部外形等单一结构变量下的航行体尾拍运动特性,而在考虑非对称头型空化器与尾裙组合外形的跨介质航行体入水尾拍运动特性及弹道特性等方面鲜有文献报道,有待进一步深入研究。
本文通过搭建高速入水试验平台,在模型内部安装测量单元记录模型运动、冲击载荷以及表面压力等参数,利用高速摄像机记录入水过程空泡形态,开展跨介质航行体在入水速度70 m/s、入水角20°、不同预置舵角(0°、3°、6°、10°)下的斜入水试验,研究入水空泡演变特性与尾拍运动特性,分析了预置舵角对入水空泡发展特性、尾拍运动特性与弹道特性的影响规律,研究结果可为跨介质航行体总体设计提供参考。
1 跨介质航行体入水试验装置与方法
跨介质航行体入水试验系统如图1所示,由试验水池、发射装置、高速摄像系统以及拦截系统等组成。试验水池长30 m、宽4 m、深4 m。发射装置为可变角度空气炮,发射管内径100 mm,管内安装8 mm×8 mm直线导轨,调节发射架可实现在0°~40°入水角范围内变角度发射。高速摄像系统由水面俯视高速摄像机CAM1、水下侧视高速摄像机CAM2、水下射灯阵和背景板组成。拦截系统为多层钢板构成的缓冲拦截回收装置,拦截板由2层3 mm钢板和2层5 mm钢板组成,间距50 mm,拦截板角度在0°~30°之间可调。

图1 试验系统示意图Fig.1 Schematic of experimental setup
图2给出了试验现场布置情况。跨介质航行体入水试验在试验水池中进行,通过可调角度的斜入水空气炮发射模型,模型入水后形成超空泡,由正上方布置的高速摄像机CAM1和水中侧向布置的高速摄像机CAM2捕获入水过程的俯视图和前视图,其中,高速摄像系统采用的相机为日本PHOTRON公司生产的FASTCAM Mini UX10系列,最高分辨率1 280×1 024条件下帧频可达到2 000帧/s,内存8 GB可存储4 s。在模型内部安装三轴加速度计、三轴角速度传感器和压力传感器,测量模型入水过程的加速度、角速度和表面压力分布信息,并记录在闪存芯片中。模型最后进入缓冲拦截回收装置中,打捞出水后,下载数据并进行分析处理,获得模型6自由度运动参数和压力数据。

图2 试验现场布置图Fig.2 Photo of experimental site
2 试验模型与坐标系定义
图3给出了试验模型示意图,由空化器(根据试验工况更换空化器头型)、圆锥段、圆柱段和尾裙段组成。航行体模型长度L=640 mm,直径D=78.5 mm,空化器直径d=26.6 mm,尾裙段扩张锥角β=8°,模型质量m=5.4 kg。模型内部安装测量单元,包括运动参数测量系统和压力测量系统,可实现入水过程的运动参数和表面压力信息的捕获。压力传感器P1布置于圆柱段上表面,压力传感器P2布置于圆柱段下表面,距离空化器端面l1=265 mm,压力传感器P3布置于尾裙段上表面,压力传感器P4布置于尾裙段下表面,距离尾段面l2=50 mm。为保证试验结果的可靠性,试验过程中对每个试验工况进行 3次重复性试验,多次重复试验获得的结果具有较好的一致性。

图3 入水试验模型Fig.3 Model of water entry experiment
图4给出了测量单元安装结构图。为确保内测系统抗冲击、防水、防松,设计了专用测试舱段,段间采用螺纹+止口接口,并设置O形圈密封。将两块内测电路板固定在支架上,通过后端隔板引出充电接口、电源开关接口和数据下载接口。

图4 测量单元安装结构Fig.4 Diagram of installation structure of measurement unit
运动参数测量系统性能指标为:1)三轴加速度计,轴向±500g,法向和侧向±200g;2)三轴角速度传感器,±4 000°/s;3)采样率5 kHz;4)记录时间2 s。
压力测量系统主要规格和性能指标为:1)量程250 kPa;2)压力过载200%;3)采样率5 kHz;4)存储时间2 s。
图5给出了坐标系的定义。建立体轴坐标系Oxyz和速度坐标系O′x′y′z′,原点O(O′)位于模型内测系统中加速度计位置处,距离模型前端面距离l=360 mm。图5中θ表示航行体运动过程中的俯仰角。

图5 坐标系定义Fig.5 Definition of the coordinate system
3 试验结果分析
3.1 典型入水过程尾拍现象与运动特性
图6给出了预置舵角为3°时跨介质航行体入水过程中空泡形态的演化过程。取跨介质航行体头部触水为t0时刻,航行体侵入水中形成入水空泡,通过提取图6(a)中入水空泡轮廓与同一时刻无预置舵角航行体入水空泡轮廓进行对比,如图7所示。结合图6和图7发现,空泡中心轴线发生了变形,呈向下倾斜趋势。以空泡中心轴线为分界线,航行体上表面与空泡的间隙减小,下表面与空泡的空间间隙增大。分析认为,由于空化器预置舵角的存在,导致航行体周围的空化流场呈上下不对称分布,空化器法线与来流速度形成的夹角Δδ相当于产生了附加攻角,由此产生的升力造成了空泡轴线发生变形、倾斜。在同一空化数和空化器直径条件下的空泡尺度一致,这就使得航行体上下表面与空泡的相对空间位置发生了变化。航行体完全入水后,以超空泡形态运动,发生尾部向下碰撞空泡壁面的现象,使得下侧空泡壁面向外凸出,见图6(b);预置舵角产生的抬头力矩[20]使得航行体呈抬头运动趋势,发生空泡弯曲变形现象,见图6(c);随着航行体抬头趋势持续增大,尾部刺穿空泡壁面浸入水中形成附体空泡附着于主体空泡上,并随着航行体的运动沿轴向和周向上发生扩张,同时由空泡对称中心两侧向内挤压原始空泡,形成清晰对称的挤压轮廓线,见图6(d)~图6(f)。由于空泡不断扩张和近水面逐渐恢复原始状态,在内外压差作用下使得近水面入水空泡颈部出现收缩、闭合等现象,脱落后的尾部空泡形成含气漩涡,这与文献[21]中出现的现象基本一致,见图6(g)~图6(i)。

图7 空泡轮廓对比Fig.7 Comparison of cavity profiles
由于水下摄像机测试视场和布设条件有限,未能捕获跨介质航行体入水全过程。结合图6以及航行体内测系统测得的运动参数来阐述入水运动特性。图8给出了有无预置舵角时跨介质航行体入水过程中法向过载Ay和俯仰角θ随时间的变化曲线。由图8可以看出,航行体在入水过程中经历了滑行运动和双侧尾拍运动两个主要阶段。滑行运动阶段:航行体尾部碰撞空泡壁面,法向过载迅速增大,尾部继续向下运动挤压壁面,出现沾湿现象。航行体受到稳定的滑行力形成了滑行运动特征,运动过程中伴随附体空泡的形成与发展,如图6(b)、图6(c)所示。此阶段的平均法向过载为85.24 m/s2,航行体俯仰角θ呈持续增大趋势。入水航行约2倍航行体长度后,航行体受到的法向过载基本在0 m/s2值附近,此时航行体在空泡内小幅摆动运动,未出现较大面积的沾湿情况。尾拍运动阶段:本次试验工况中出现了3次尾拍现象。其中,2次下尾拍过载峰值均高达296 m/s2,明显高于上尾拍过载(其量值为230 m/s2);在第1次尾拍过载峰值时,航行体俯仰角首次达到峰值,俯仰角θ由-20°增大到-16.52°;随后俯仰角减小,航行体向下运动,直至发生第2次尾拍运动,此时俯仰角θ=-23.75°;之后航行体向上爬升运动,在达到第3次尾拍过载峰值时,俯仰角θ=-15°,通过持续不断的尾拍运动,最终可以实现航行体转平/偏转运动。通过对比有无预置舵角下航行体法向过载与俯仰角变化曲线可以看出,二者均形成了滑行运动特征,但有预置舵角的航行体运动呈现爬升趋势,其俯仰角增量持续增大,形成了尾拍运动。
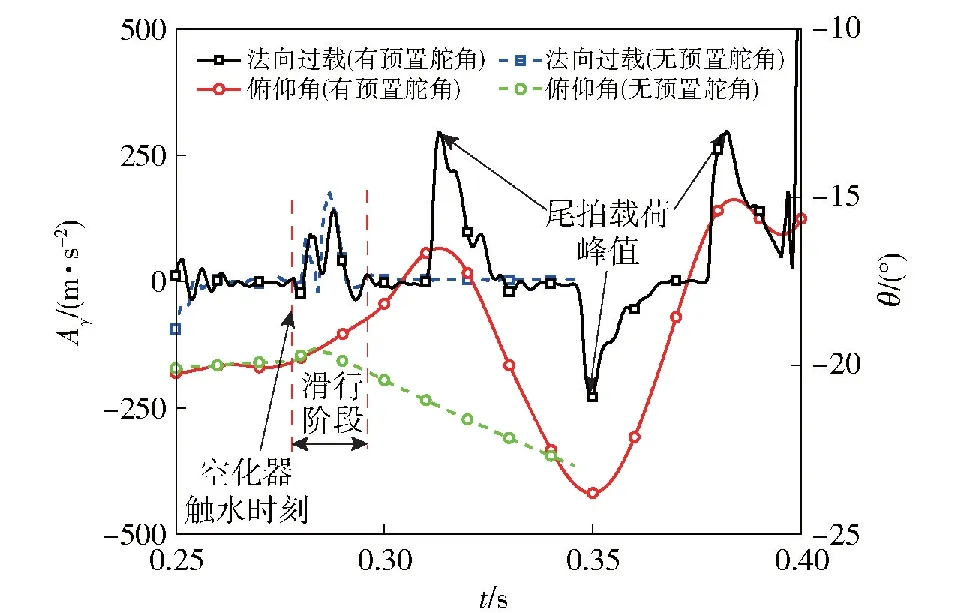
图8 有无预置舵角时跨介质航行体运动特性Fig.8 Motion characteristics of the trans-media vehicle with or without preset rudder angle
图9给出了入水过程中航行体滑行运动和尾拍运动时的受力示意图,其中:Fcx、Fcy、Mcz分别为空化器所受轴向力、法向力、俯仰力矩;Fwx、Fwy、Mwz分别为航行体尾部所受轴向力、法向力、俯仰力矩,包含了圆锥段、圆柱段以及尾裙段发生沾湿而产生的流体动力;v为航行体的航行速度。设Fx、Fy、Mz分别为航行体所受轴向力、法向力、俯仰力矩,则跨介质航行体高速入水运动的动力学方程满足如下方程组:

图9 航行体受力分析示意图Fig.9 Diagram of force analysis of the vehicle
(1)
结合图8和图9对入水过程中各运动特征的形成原因进行分析,跨介质航行体高速入水运动在空化器预置舵角产生的抬头力矩作用下实现转平/偏转运动,航行体尾部拍击并刺穿空泡壁出现沾湿,从而产生平稳的升力和恢复力矩。随着沾湿区域内附体空泡的形成与发展,尾部流体动力会发生非线性变化,由于空化器产生的流体动力为恒定值[22],使得航行体的流体动力呈现非线性变化。
入水滑行运动过程中由尾部形成的恢复力矩Mwz与空化器形成的抬头力矩Mcz达到动态平衡,合力矩Mz≈0 N·m(合力矩在0 N·m附近波动),尾部法向力Fwy和空化器法向力Fcy共同提供航行体的滑行升力。
入水尾拍运动过程中在空化器预置舵角的作用下,航行体尾部向下刺穿空泡壁面达到最大浸水深度,形成的恢复力矩Mz=Mwz-Mcz<0 N·m,促使航行体尾部快速弹起,此时航行体具有较高的低头角速度,攻角逐渐减小,攻角减小导致尾部法向力减小;在航行体尾部与空泡上表面接触之前,空化器力矩冲量不足以抑制尾裙恢复力矩冲量,不能抑制航行体低头转动;当航行体尾部拍击空泡上表面时,尾部产生与空化器相同方向的抬头力矩,形成的恢复力矩Mz=Mwz+Mcz>0 N·m,低头转动角速度迅速衰减,航行体达到极小攻角值。
3.2 预置舵角对航行体入水过程影响分析
3.2.1 预置舵角对入水空泡发展的影响
表1给出了预置舵角为3°、6°和10°时跨介质航行体入水过程中空泡形态的发展特性。表1中Φ为航行体轴向与水平线的夹角,lθ1、lθ2、lθ3分别为不同预置舵角工况下附体空泡轴向长度。由表1可以看出:随着预置舵角增大,航行体转平/偏转的趋势明显加快,见t0+0.021 0 s时刻;预置舵角为3°时航行体未出现沾湿,随着预置舵角增大,航行体尾部出现沾湿的时间提前,见t0+0.029 5 s时刻;随着航行体持续的抬头运动,入水空泡弯曲变形明显加剧,尾部沾湿面积增大,沾湿区域逐渐向圆柱段发展,形成的附体空泡朝航行体两侧向外扩张,预置舵角越大,扩张速度越快,见t0+0.032 5 s和t0+0.035 5 s时刻。分析认为,由于航行体在刺穿空泡壁面后滑行运动,沾湿面发生二次空化形成附体空泡,预置舵角越大,形成的抬头力矩越大,航行体尾部浸水深度越大,同时作用于空泡的压力越大,从而挤压附体空泡沿主体空泡向轴向和径向方向发展。当入水空泡发生闭合时,预置舵角为3°下的附体空泡与主体空泡逐渐融合,而随着预置舵角增大,预置舵角为6°时的附体空泡与主体空泡分离趋势明显,预置舵角为10°时尾流结构中出现双涡管现象[23]。

表1 不同预置舵角下跨介质航行体入水空泡发展过程Table 1 Cavity development of trans-media vehicle during water entry under different preset rudder angles
3.2.2 预置舵角对入水过程压力特性影响
航行体表面压力特性能够反映空泡发展形态与航行体沾湿状态。为了分析预置舵角作用下的跨介质航行体入水过程中表面压力特性,图10给出了航行体前端和尾端两个截面上下测点压力(P1、P2、P3、P4)随时间变化曲线。由图11可以看出:在t为0.277~0.285 s时刻,定义入水距离s=v0×Δt=0.59 m,航行体入水运动至尾端测点位置,v0为入水初速,Δt为时间间隔;在空化器触水至尾裙段开始入水过程中,航行体由空中飞行阶段转入开式空泡发展阶段,形成了开式空泡与外界环境相连通,航行体上表面各测点压力与环境压力基本保持一致;在t=0.285 s时刻,航行体下表面测点P2和P4的压力值分别达到了110 kPa和125 kPa,认为P2和P4测点位置出现了沾湿现象,随着预置舵角增大,压力峰值增大,这是因为入水过程中抬头力矩的作用使得航行体肩部下压水面出现沾湿,同样尾部入水过程中亦出现了沾湿现象,而且预置舵角越大,产生的抬头力矩也越大,与图10(a)相对应,在开空泡阶段内,随着空泡体积的快速膨胀,泡内压力快速下降,同时随着入水深度的增大使得各个测点压力快速下降;在t<0.300 s时刻内,通过对比航行体尾端上下压力测点P3和P4的压力值发现,在此时间区间内,同一时刻下的P4_time>P3_time,说明航行体下表面保持沾湿状态,结合图8和图10也印证了所研究的航行体在入水过程中形成了滑水运动特征;在t为0.300~0.325 s时刻,航行体出现沾湿现象和尾拍现象,结合图8可知,航行体在完成滑行运动过程后,在空泡内经过短暂的小幅摆动运动,上表面测点P1和P3的压力值出现波动,此后,航行体发生向下尾拍运动,尾端下表面测点P4撞击空泡壁面,压力值陡升,随着尾部刺穿空泡壁面形成沾湿,前端测点P2亦经历尾拍、沾湿等历程,但与尾端相比,形成的压力峰值较小,与图10(b)~图10(d)中出现的尾拍与沾湿现象相对应;在t=0.325 s时刻左右,对应于航行体入水5倍航行体长度时,各个测点压力降至最低值,随着预置舵角增大,出现最低压力的时间提前,最低压力值增大,尾拍运动形成后,尾部下压拍击空泡壁引起的压力峰值更显著,入水空泡形成闭合后,泡内压力出现回升现象。

图10 航行体各测点压力变化曲线Fig.10 Pressure curves of measuring points of the vehicle

图11 不同预置舵角下的过载与攻角随时间变化曲线Fig.11 Curves of variation of overload and angle of attackwith time at different preset rudder angles
3.2.3 预置舵角对入水载荷特性的影响
图11给出了不同预置舵角下航行体的轴向过载Ax、法向过载Ay和航行攻角α随时间的变化曲线。由图11可以看出:空化器触水后在t=0.284 s时刻形成了轴向冲击过载,不同预置舵角下的过载峰值基本一致,皆达到了-280 m/s2,航行攻角随预置舵角的增大而增大;入水后航行体载荷特性与沾湿面积呈正相关,随着入水空泡的形成与发展,航行体轴向过载逐渐减小;航行体头部触水至尾部完成入水过程中形成了滑行运动特征,航行攻角持续增大,航行体下表面沾湿后受到方向向上的法向过载,其均值随预置舵角增大而增大。分析认为,在预置舵角产生的抬头升力作用下航行体抬头向上运动,从而使得航行体下表面对水的挤压程度加剧,形成的法向过载也越大。航行体尾拍运动阶段,预置舵角为3°和6°时形成双侧尾拍运动,而预置舵角为10°时则形成了单侧尾拍运动,航行攻角减小;随着预置舵角增大,最大航行攻角增加,最大航行攻角形成时间提前,航行体过载也越大。预置舵角为10°时航行体在第1个尾拍时刻形成的法向过载峰值达到了-407.4 m/s2,是其在滑行阶段法向过载峰值的2倍。因此,尾拍载荷对航行体结构强度及设备稳定性的影响不容忽视。
3.2.4 预置舵角对入水弹道特性的影响
图12给出了不同预置舵角作用下航行体入水过程中俯仰角速度ω和俯仰角θ随时间变化的曲线。由图12可以看出:随着预置舵角的增大,航行体俯仰角速度增大,俯仰角度增量也增大;航行体入水时刻的俯仰角在0°值附近,认为入水前扰动对入水过程的影响较小。由预置舵角产生的抬头力矩使得航行体入水后的俯仰角速度和俯仰角持续增大;在滑行运动阶段,航行体的俯仰角围绕在某一恒定值上下小幅振荡来保持航行体的动态稳定;通过将航行体尾拍运动阶段俯仰角速度参数进行时间平均化处理,计算公式如式(2)所示,对航行体转平/偏转的机动能力进行评估。计算获得了3°、6°、10°三种预置舵角下的俯仰角速度时间平均化的值分别为82.33°/s、144.46°/s、189.94°/s,可以看出,随着预置舵角增大,航行体俯仰角速度的时均化值增大,航行体转平机动能力增强。
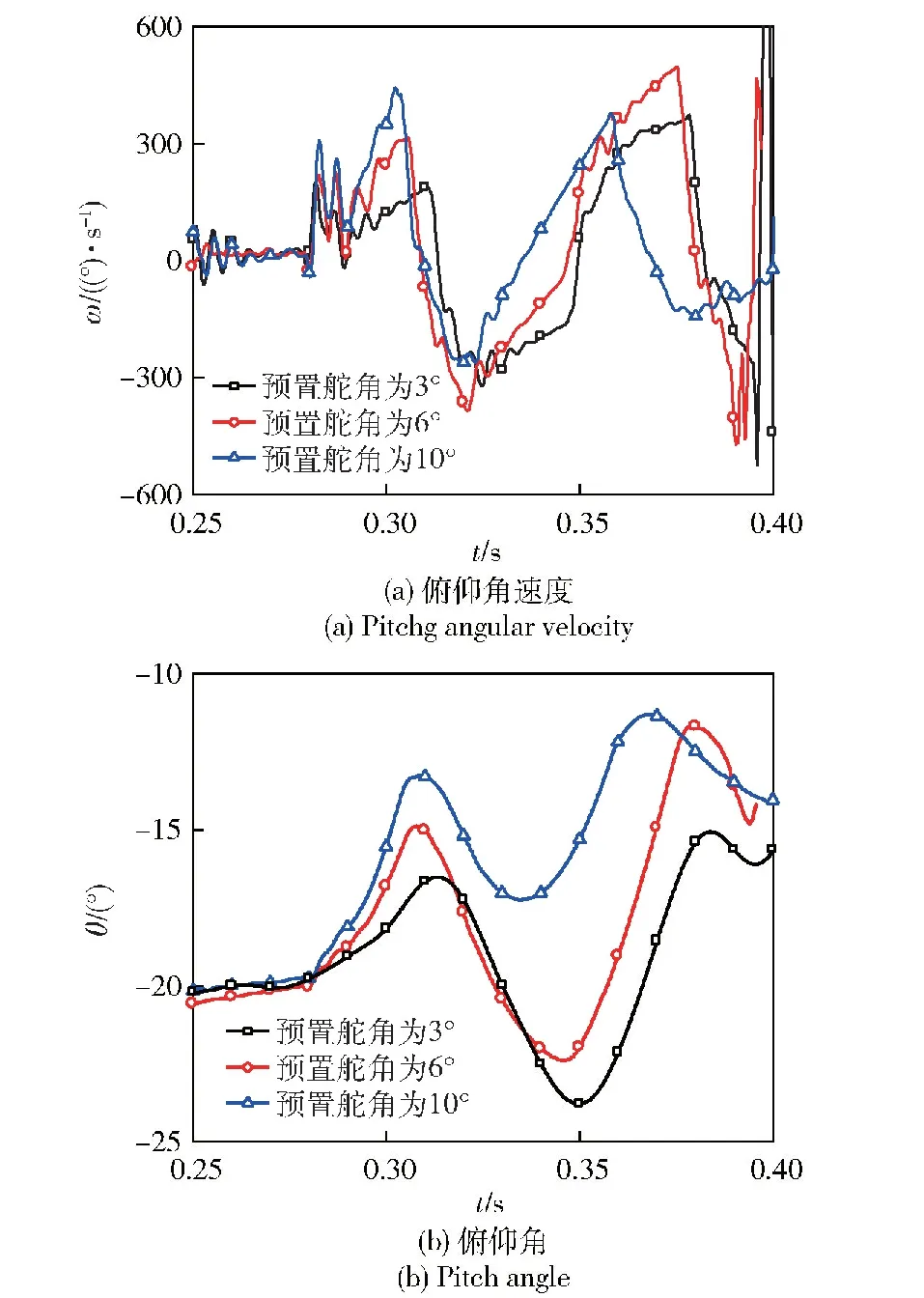
图12 不同预置舵角下航行体俯仰角速度和俯仰角变化曲线Fig.12 Variation curves of pitch angular velocity and pitch angle under different preset rudder angles
(2)
式中:T为尾拍周期;ω(t)为随时间变化的参数。
图13给出了不同预置舵角下航行体入水过程中合速度v0和x轴、y轴方向的速度分量(vx,vy)随时间的变化曲线。由图13可以看出:不同预置舵角下航行体的合速度变化趋势基本一致,速度均呈衰减趋势;航行体入水航行0.150 s后速度衰减28.5%。航行体入水滑行阶段:3种预置舵角下x轴方向的速度变化量基本一致,结合图11亦可知,该阶段航行体在不同预置舵角下受到的轴向过载和法向过载在量值上大致相同;在尾拍运动阶段:随着预置舵角增大,航行体在x轴方向上的速度分量增大,但其变化量较小,对y轴方向上的速度分量影响较大,其幅值呈负向陡增趋势,表现为航行体爬升运动,且随着预置舵角的增大,航行体在y轴方向速度分量增大。在t为0.350~0.400 s时间区间内,预置舵角为3°和6°时航行体在y轴方向的速度分量先缓降后增加,而预置舵角为10°时航行体在y轴方向速度分量持续上升,说明10°预置舵角航行体转平/偏转效率最高。

图13 不同预置舵角下航行体速度随时间变化曲线Fig.13 Velocity-time curves at different preset rudder angles
图14给出了不同预置舵角下航行体质心运动轨迹曲线。由图14可以看出,随着预置舵角增大,航行体运动轨迹转平/偏转趋势明显加剧,结合图12和图13可以发现,发生明显转折点在xc=9 m位置处,对应于t=0.300 s时刻,该时刻为尾拍运动形成时刻,此时俯仰角速度ω和y轴方向(向上)速度分量vy迅速增大,使得航行体能够产生转平/偏转的运动趋势。对比3种预置舵角工况下的弹道特性,预置舵角为10°时航行体转平/偏转的增量最大。结合图11(b)和图12(b),由法向过载曲线可知,预置舵角为10°时,尾裙下拍空泡壁面形成的低头力矩,并不足以使尾裙碰触上空泡壁面,形成单侧尾拍运动,使得尾拍周期显著缩短,航行体爬升效率提升。

图14 不同预置舵角下航行体质心运动轨迹Fig.14 Motion trajectories of the vehicle’s center of mass at different preset rudder angles
4 结论
本文采用高速摄像和内置测量单元等手段相结合的研究方法,针对预置舵角+尾裙组合形式的跨介质航行体以20°入水角倾斜入水过程开展了试验研究,研究了航行体入水空泡发展与尾拍运动特性,分析了不同预置舵角下航行体载荷特性、压力特性以及弹道特性的变化规律。得出主要结论如下:
1)带尾裙跨介质航行体入水运动过程分为滑行运动阶段和尾拍运动阶段。在滑行运动阶段,尾裙沾湿产生的俯仰力矩与头部空化器产生的俯仰力矩形成动态平衡,维持航行体攻角小幅变化,该运动阶段终止于约入水2倍航行体长度处;在尾拍运动阶段,形成的尾拍法向过载峰值最高可达到滑行运动阶段形成法向过载的2倍左右,因此,尾拍载荷对航行体结构强度及设备稳定性影响不容忽视。
2)入水运动过程中,主体空泡发生弯曲变形,当航行体尾部刺穿主体空泡后,附体空泡形成,并沿着主体空泡不断发展。当尾部空泡形成闭合时,随着预置舵角增大,由航行体沾湿形成的附体空泡与主体空泡分离趋势加剧。在预置舵角为10°时,空泡尾部形成了双涡管;入水5倍航行体长度后,入水空泡形成闭合,闭合前后的泡内压力呈先降低、后上升的变化趋势。
3)随着预置舵角增大,带尾裙跨介质航行体入水弹道的转平/偏转能力增强;预置舵角为10°时航行体形成了单侧尾拍运动,使得尾拍周期显著缩短,爬升效率提升。
