基于激光雷达下无人驾驶汽车的环境感知系统的研究
2023-07-10张旭燕郭建宏
张旭燕 郭建宏

【摘 要】随着人工智能技术和互联网技术的逐渐发展,人们生活水平不断提升,人们出行方式也得到了转变,传统汽车驾驶方式正在向智能化、电子化和自动化方向发展,无人驾驶汽车是目前汽车发展的热门领域。环境感知技术是无人驾驶汽车的重要控制技术之一,其工作性能直接影响无人驾驶汽车的行为决策准确度,关系着汽车行驶的安全性与可靠性。本研究以激光雷达为环境感知系统的设计基础,并基于云计算方法提高环境数据处理效率,构建一种基于激光雷达下无人驾驶汽车环境感知系统,并通过试验表明,该系统可以实现多维度环境信息感知,可以为无人驾驶汽车的智能化发展提供技术参考,对于保证无人驾驶技术推广的安全性与可靠性具有一定的参考价值。
【关键词】激光雷达;环境感知;云计算;无人驾驶;试验
中图分类号:U463.675 文献标志码:A 文章编号:1003-8639( 2023 )06-0003-03
Research on Environment Sensing System for Driverless Cars Based on LIDAR*
ZHANG Xu-yan,GUO Jian-hong
(Lanzhou Petrochemical Vocational and Technical University,Lanzhou 730060,China)
【Abstract】With the gradual development of artificial intelligence technology and Internet technology,people's living standards are constantly improving,among which the way people travel has also been transformed,and the traditional way of driving cars is developing in the direction of intelligence,electronics and automation,and driverless cars are currently a popular field of automotive development. Environment sensing technology is one of the important control technologies for driverless cars,and its working performance directly affects the behavioral decision accuracy of driverless car decision-making,and is related to the safety and reliability of car driving. This study takes LIDAR as the design basis of environment perception system and improves the efficiency of environment data processing based on cloud computing method to build a driverless car environment perception system based on LIDAR,and shows through experiments that the system can realize multi-dimensional environment information perception,which can provide technical reference for the intelligent development of driverless cars and is of reference value for ensuring the safety and reliability of the promotion of driverless technology. The system can provide a technical reference for the intelligent development of unmanned vehicles,and has certain reference value for ensuring the safety and reliability of unmanned technology promotion.
【Key words】LIDAR;environmental awareness;cloud computing;driverless;experiments
隨着互联网技术的提升及中国综合国力的快速发展,人民的生活水平也得到了很大的提高,生活方式逐渐发生改变[1-2]。其中,人们的出行方式逐渐由传统的汽车驾驶正在向自动驾驶、智能驾驶和无人驾驶方向发展,因此,中国汽车产业发展迅速,汽车保有量的不断提升也随之带来了一系列安全问题。
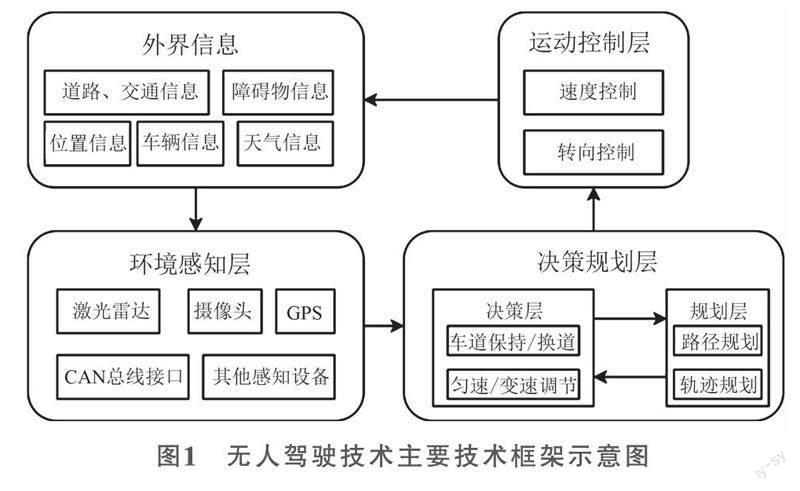
由于中国人口众多,道路环境较为复杂,各种因素融合造成了中国交通事故高发,交通事故同时也带来了一系列人员伤亡和经济损失。无人驾驶汽车技术主要包括环境感知技术、决策控制技术和运动控制技术等(图1),其中,环境感知技术是无人驾驶汽车的基础,主要是通过各种传感器获取车辆及周围驾驶环境信息,及时对车辆路径规划、运行速度和转向等方面做出决策与控制。目前,美国Google公司推出的第5代无人驾驶系统融合了车载传感器和新型激光雷达,可以提高道路故障发生的准确率与灵敏度,另外包括百度公司开发的无人驾驶Apollo、小马智行和华为等也在无人驾驶技术中取得了一系列研究成果[3-6]。
为了提高无人驾驶汽车环境感知信息获取的准确率,本研究提出一种基于激光雷达下无人驾驶汽车的环境感知系统,解决传统由于单传感器带来外界信息的单一性,提高信息获取的全面性与准确性。研究结果对于提高无人驾驶汽车的安全性与稳定性具有一定的参考价值。
1 国内外研究进展
1.1 基于视觉识别技术下目标检测技术
车载视觉传感器具有价格低廉、数据传输便捷等优点,在无人驾驶环境感知系统中得到了广泛应用与发展,是目前技术相对成熟的环境感知技术之一。早期无人驾驶视觉识别技术主要是通过预先设定提取器,确定感知区域,对环境目标的明暗、脚点等局部特征进行分析,然后通过深度学习和人工智能算法等实现数据分析,但是对于未知数据预测性能较差,在复杂的道路环境应用较为困难。后期,随着深度学习和人工智能算法的不断发展,为数据处理提供一种新的解决方案,可以显著改善传统数据处理算法的精确度和抗干扰性,如两步式算法、YOLO系列算法和SSD算法等,可以在改善数据处理速度的同时提高数据预测性能。
1.2 基于激光雷达下目标检测技术
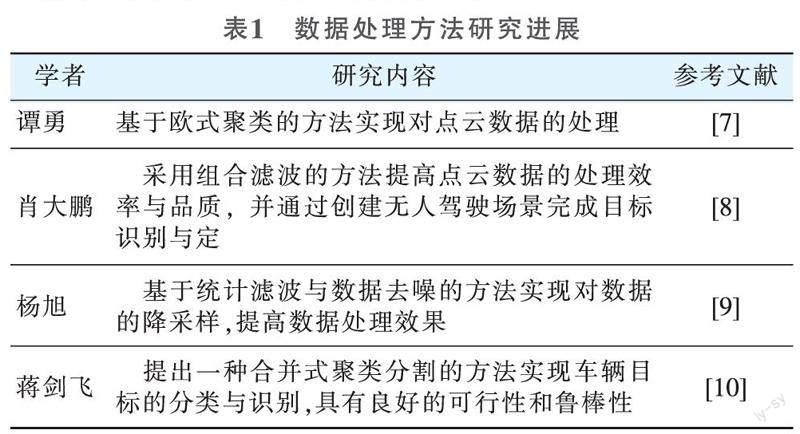
激光雷达是通过连续不断的激光获取目标物体的参数,通过三维点实现环境的感知。由于数据点具有不均匀性,因此需要对数据进行预处理,实现数据的除噪和降采样。目前常见的数据处理方法如表1所示。
2 基于激光雷达下无人驾驶汽车的环境感知系统的设计
激光雷达是无人驾驶汽车中常用的传感器,是获取汽车行驶位置及周围道路信息的重要媒介。激光雷达主要是使用激光照明目标物体,通过主动照明有助于传感器接收器在一切测量环境中对准发射源。传感器不受外部光源影响,可在夜间、地下、隧道等环境中使用。本研究基于激光雷达实现信息采集与目标检测,并将多传感器采集的环境数据上传至云计算平台,实现无人驾驶汽车关键信息的获取与道路目标检测。
2.1 数据采集平台
数据采集平台主要包括车载传感器、摄像头、激光雷达和汽车导航定位系统等,要求数据采集平台可以实现环境数据采集,根据用户需求定制数据采集与访问方案。
2.2 关键部件的设计与选型
1)激光雷达。本系统激光雷达选择RoboSense生产的RS-Lidar-16,可以满足系统对数据传输精度、响应灵敏度的要求,安装在车辆顶端,其基本技术参数见表2。
2)摄像头。无人驾驶车辆摄像头选取LI-USB30-AR023ZWDRB,具有体积小、安装便捷、分辨率较高及数据传输稳定等应用优势,其主要技术参数见表3。
2.3 数据处理算法设计
1)构建点云快速搜索。无人驾驶汽车激光雷达对目标物体扫描产生的原始点云数据不存在一定的拓扑关系,属于无序状态,因此,首先需要对激光雷达采集的点云数据进行处理,通过构建合理的数据拓扑结构实现数据的快速查询,目前常见的点云数据处理方法主要包括半径邻域搜索和K邻域搜索。
半径内近邻搜索(Neighbors within Radius Search),是指搜索点云中一点在球体半径R内的所有近邻点,程序如图2所示。K邻域搜索算法主要是通过数据所有的特征计算新数据与已知类别数据集中的数据点的距离,按照距离递增次序进行排序,选取与当前距离最小的K个点,对于离散分类,返回K个点出现频率最多的类别作预测分类;对于回归,则返回K个点的加权值作为预测值[如将这些邻居属性的平均值赋给该样本,就可以得到该样本的属性。更有用的方法是将不同距离的邻居对该样本产生的影响给予不同的权值(weight),如权值与距离成正比]。在本研究中选择K邻域搜索算法。
2)点云数据的精简。使用激光雷达对无人驾驶环境信息进行采集时,初始数据过于冗余会造成计算负担大,因此,应该对激光雷达采集数据进行精简与划分,为后续数据处理提供基础条件。首先对有效区域面积进行划分,具体范围如表4所示,通过划分有效数据检测区域减少目标数据采集量;然后对数据进行降采样,提高数据后续處理效率,减少数据的点云疏密程度,在此主要采用体素滤波法;最后排除噪声对数据的影响,需要对采集的数据点进行噪声滤除处理,常见的数据降噪方法主要包括半径滤波、双边滤波等方法。
2.4 数据处理算法测试结果
对提出的数据处理算法进行试验与分析,采集点云数量见表5。由表5可知,在数据处理方法下,点云的数量逐渐下降,滤除了无效数据。选取点云数据真实障碍物1015个、检测总数量1001个、漏检数量127个、误检数量130个为评价指标对数据检测结果进行分析。
3 结论与展望
本研究针对目前无人驾驶车辆环境信息监测效率低等问题,提出了一种基于激光雷达的点云数据处理算法,构建无人驾驶车辆环境感知系统,并对采集数据处理方法与步骤进行论述,通过实验验证其方法可行性与稳定性。
本研究道路检测障碍物主要为车辆行人和骑行者,未来应该丰富检测数据种类,增加交通灯、信号牌等其它障碍物,提高环境感知系统和数据处理的通用性。
参考文献:
[1] 刘奔. 基于改进环境感知技术的无人车路径规划和轨迹跟踪控制方法研究[D]. 北京:北京林业大学,2021.
[2] 高扬,曹王欣,夏洪垚,等. 低可见度环境下基于同步定位与构图的无人驾驶汽车定位算法[J]. 交通运输工程学报,2022,22(3):251-262.
[3] 连天宇. 城市环境下的无人驾驶汽车换道决策研究[D]. 沈阳:沈阳工业大学,2021.
[4] 吕品,李凯,许嘉,等. 无人驾驶汽车协同感知信息传输负载优化技术[J]. 计算机学报,2021,44(10):1984-1997.
[5] 王媛媛. 考虑不确定性的无人驾驶汽车轨迹规划算法研究[D]. 长春:吉林大学,2021.
[6] 李旭川. 多车环境下的无人驾驶汽车换道轨迹规划方法研究[D]. 西安:长安大学,2021.
[7] 谭勇. 基于激光雷达的无人驾驶障碍物检测与辨识[D]. 长春:吉林大学,2020.
[8] 肖大鹏. 典型场景下无人驾驶三维目标识别算法研究[D]. 哈尔滨:哈尔滨工业大学,2018.
[9] 杨旭. 激光雷达点云数据的滤波和分割处理[D]. 哈尔滨:哈尔滨工业大学,2020.
[10] 蒋剑飞. 基于激光雷达的智能汽车可通行区域及障碍物检测方法研究[D]. 武汉:武汉理工大学,2020.
(编辑 杨 景)
