基于机器人自动供料装置的研制
2023-07-08周大威耿传熙刘木林陈荣青
周大威,耿传熙,潘 波,刘木林,陈荣青
(迈得医疗工业设备股份有限公司,浙江 台州 317600)
在产品生产组装过程中,自动化供料一直是提高生产效率的重要手段。随着生产技术不断提高,供料结构不断被优化,传统的手工上料面临着效率低下的问题,并始终无法解决,所以逐渐被自动化供料取代。自动化供料可以大大减少各种自动化组装的人力,显著提高工作效率,也避免了机械设备与人的直接接触,大大提高了操作人员的安全,已被广泛应用于各种自动化组装设备中[1]。
本装置采用CCD 定位系统和蛛型机械手,可以解决传统振盘解决不了的薄片类、易刮擦损伤类异性工件上料难、易卡料的难题,更可满足当前自动化中的异性物料、大批量的供料需求。
1 设备的结构及工作原理
自动供料装置总装图如1 所示。自动供料装置共分为3 部分,分别是供料结构、蛛形机器人吸取结构和翻转搬运结构,如图2 所示。

图1 自动供料装置总装图

图2 自动供料装置各结构示意图
本装置能供料的物品种类多,本次试验以滴斗为例,如图3 所示。所搬运的滴斗外形复杂,若用普通振动盘供料则容易划伤表面,且不容易分离重叠的物料和控制滴斗出料时的方向。
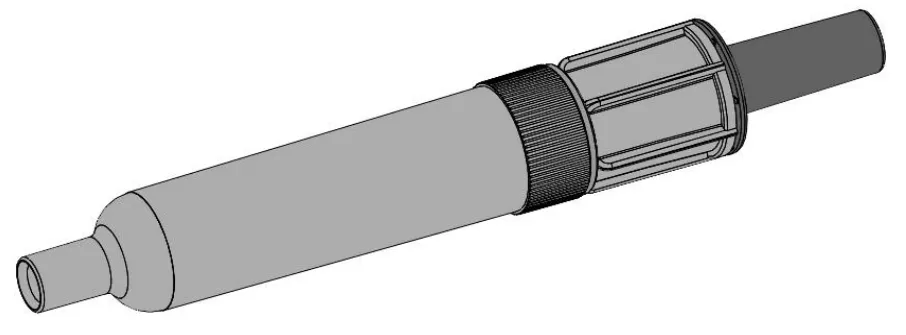
图3 滴斗3D 模型图
1.1 供料结构
供料部分主要包括供料料仓和料盒,如图4 所示。

图4 滴斗供料结构图
本结构共有4 个供料料仓,料仓用SUS304 不锈钢制作,表面光滑,不会擦伤物料表面。通过调整料仓前挡板的安装高度,可以调整出料量。料仓底部的振动盘不断振动,滴斗会掉落到料盒中,料盒两侧的光纤传感器检测到滴斗已装满时,会将此信息反馈给供料料仓底部的直振,让它停止振动。同时,料盒一旁的气缸伸出打开挡板,物滴斗全部进入柔性振盘上。当第一个料仓没料时,电缸会控制料盒移动到第二个料仓卸料处,以此类推。
1.2 蛛形机器人吸取结构
本结构由CCD 相机、柔性振盘、载具线和蛛形机器人4 部分组成,如图5 所示。
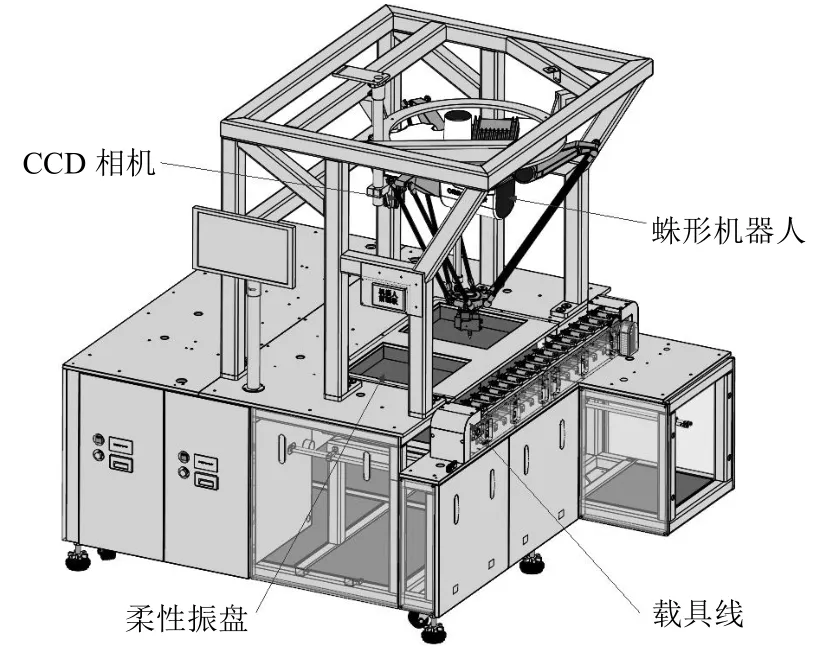
图5 蛛形机器人吸取结构图
柔性振盘上装有透明PC(聚碳酸酯)的储料板,之所以采用透明PC 板,是因为柔性振盘底座有发光源,CCD 通过发光源捕获取滴斗的位置,并将此信息反馈给蛛形机械手。该PC 板上有横向和竖向交叉2种槽口,通过不断振动,利于将堆叠在一起的滴斗振散,同时使滴斗只能以横向或者竖向的朝向置于储料板上。并根据储料板上的滴斗密度,判断供料料仓是否向柔性振盘内加料。蛛形机械手底部装有真空发生器和真空吸盘,通过CCD 系统反馈的信息,机械手会移动到有滴斗的位置,真空发生器会控制真空吸盘,成功吸取滴斗,并根据CCD 反馈的信息调整滴斗的朝向,能以统一的朝向放进载具内,载具通过电机控制同步轮和同步带完成循环。通过现场测试,CCD 相机配合蛛形机器人可精准、稳定、快速吸取滴斗。使用CCD 拍下的滴斗位置情况如图6 所示。

图6 CCD 拍照情况图
1.3 翻转搬运结构
本结构利用装在摇臂末端的取料上下气缸和取料手指夹夹取滴斗腰部位置进行搬运。本结构利用电机带动同步轮和同步带,让滴斗实现一定距离的翻转搬运。由于摇臂始端和末端的齿轮大小不一致,可以在翻转过程中使原本在载具上的滴斗由水平方向变为组装机构所需的垂直方向,如图7 所示。
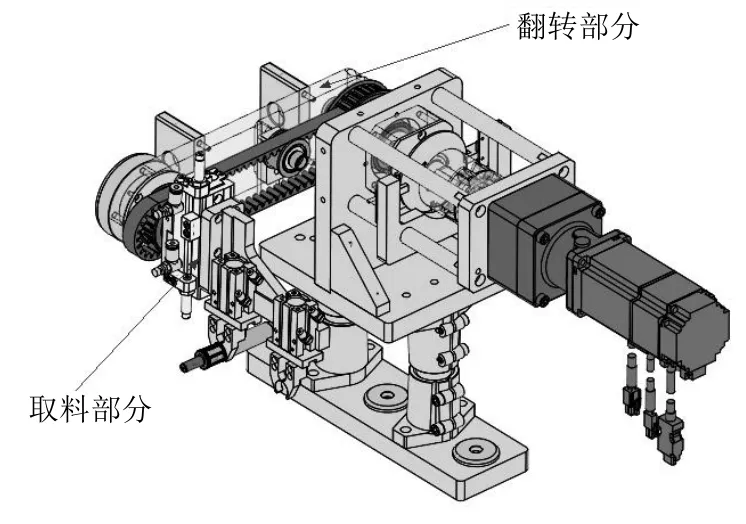
图7 翻转搬运结构图
1.4 滴斗自动供料装置的创新点
本结构采用柔性振盘振散滴斗,解决了卡料、分料不均匀、叠料等难题;CCD 捕捉滴斗位置,蛛形机械手吸取滴斗,实现了精准、快速、稳定的拾取分拣、搬运操作,大大提高了工作效率,并且不会擦伤滴斗表面;翻转搬运结构改变滴斗朝向与位置,提高了后续组装的便捷性[2]。本供料装置可满足基本的功能需求,实现自动供料。
2 内壁通气检测机构控制系统设计
2.1 控制系统整体设计
整台设备的控制系统的主要任务是控制供料结构、机械手吸取结构和翻转搬运结构及系统和主机交互工作状态。通过PLC 实时控制供料系统的供料量、机械手吸取物料的情况和翻转搬运的情况[3-4]。整机控制方案如图8 所示。

图8 整机控制系统方案图
2.2 PLC 控制系统
本设备整体控制系统以PLC 为核心,完成气缸、气爪、伺服电机的检测控制、运动控制和指示灯的控制,同时装配Proface 触摸屏实现人机界面交互,硬件模块布局如图9 所示。

图9 硬件模块布局图
输入输出分配如表1 所示。整体控制系统以PLC为核心,选用了欧姆龙伺服驱动器、欧姆龙电机、Proface 触摸屏、正泰电器等硬件。

表1 输入输出信号
整机控制程序较庞大,主要分为公共程序、伺服电机程序和检测控制程序等,能够实现初始化运行、位置控制、检测控制、故障处理等各项任务,PLC 的输出控制主要是通过直接输出或者辅助继电器辅助实现的。
2.3 人机界面设计
本设备使用了Proface 人机界面,通过与PLC 的组态,实现设备运行监控及操作。根据设计的实用性原则,触摸屏画面以自动生产画面为主界面。有设定运行参数、位置参数和手动操作的按钮窗口,能够实现参数的设定及手动操作等。
根据设计的实用性原则,触摸屏画面以生产画面为主界面,下设运动参数、工艺设定等子窗口,通过按钮切换进入。主画面主要显示设备实时工况,如图10 所示。

图10 人机界面主画面
3 结论
通过本次试验,本装置产量可以达到2 200 Pcs/h,合格率可稳定在99.9%,能满足自动化供料的需求。
本设备通过柔性振盘振散物料,利用CCD 捕捉物料位置,利用蛛形机械手吸取物料,利用翻转搬运结构改变物料朝向与位置实现物料自动化供料;同时,采用不锈钢材料大幅提高了机构的洁净度与使用寿命,为不同类型物料的自动供料提供了很好的思路和验证基础。
