基于AIS与机器视觉检测的船桥智能避碰系统1
2023-07-07李红卫陈业程
李红卫,陈业程
(1.广东交通职业技术学院 海事学院,广州 510800; 2.广东省船舶自动化工程技术研究中心,广州 510800)
0 引言
随着船舶与桥梁的数量与日俱增,船桥碰撞事故发生的频次也逐渐增加。为保障船舶的航行安全,防止出现船桥交通事故,各国纷纷投入精力研究船桥避碰技术[1]。桥梁的防撞措施一般可分为被动防撞和主动防撞[2]。被动防撞是通过桥墩自身的加强或防护措施来抵抗船舶的撞击威胁,被动防撞并未从根本上规避船桥碰撞事故的发生。主动防撞是指通过对船舶的航行轨迹进行干预,避免发生舰桥碰撞事故的措施。目前业界的研究热点集中于建立安全监控系统,实时监控过往船舶,及早发现事故隐患。
自动识别系统(Automatic Identification System,AIS)能够实现船对船、船对岸和岸对船的识别,有效交换导航信息和航行安全短消息,完成船舶识别与避碰、狭水道导航、引航调度、海上交通管理和海上搜救等任务[3]。
视觉在线检测技术具有高速、非接触、可靠、稳定、自动化程度高等优点,目前已广泛应用于各行各业。甚高频(Very High Frequency,VHF)通信易受信号干扰、天气、海浪等因素的影响,易发生碰撞事故,难以满足现代船舶的避碰要求。
本文设计一种基于AIS与机器视觉检测的船桥智能避碰系统,并提出一种针对大背景中微小船舶目标的检测方法,以期提高目标识别率,降低船桥碰撞概率。
1 船桥智能避碰系统
如图1 所示,船桥智能避碰系统主要包括桥基站和软件处理平台。桥基站由电荷耦合器件(Charge-Coupled Device,CCD)摄像机和自动识别系统组成。
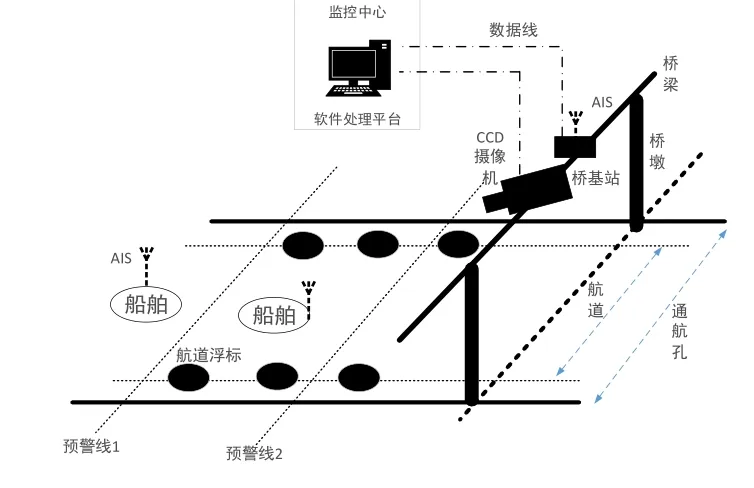
图1 船桥智能避碰系统
桥基站AIS 具有以下功能:1)提前发布助航预警信息;2)判断船舶行驶态势;3)报警控制及信息发布;4)警情上报;5)接收并处理通航船舶AIS 周期性发布的信息内容;6)在船舶进入预警线之前向其发布海情信息;7)判断船舶是否越过航道边界;8)上报通航船舶信息。
机器视觉系统使用单目视觉模式,每个通航孔安装1 个摄像机,用于实时采集桥区场景视频,并将视频数据传送至软件处理平台。软件处理平台运行系统的核心算法,综合比较AIS 上报信息及机器视觉系统检测结果,并确定船舶相关信息。
该系统基于计算机视觉几何对运动船舶的空间定位方法进行研究,即根据目标在图像中的像素位置确定其在空间中的地理位置,以及与船桥碰撞相关的船舶运动态势参数的计算方法。此外,还对大背景中微小目标的检测方法进行分析和研究。
2 大背景中微小目标检测方法
大背景中微小目标检测方法包括以下步骤:1)对场景的全局信息进行预处理;2)粗略判断可疑目标所在区域;3)重点关注可疑目标区域;4)获取该区域的高分辨率图像;5)进行图像处理和目标识别。
2.1 图像预处理
机器视觉系统从场景中获得的图像包含一些图像噪声。图像噪声来源可能是环境变化,也可能是传感器转换过程中的电磁干扰。这些图像噪声会产生错误的引导。因此,有必要减少图像噪声的干扰。
在对大背景中的微小目标进行检测时,由于背景占图片的绝大部分,故影响图片显著性的主要因素为背景的不均匀和某些脉冲噪声。在进行图像除噪时,主要采用均值滤波和中值滤波等2 种方法。
1)均值滤波法
均值滤波法将滤波掩膜在图像中逐点移动,使用滤波掩膜内所有点的像素平均值替代图像某点处的原像素值。均值滤波法能有效减少背景的不均匀性,使图像更加平滑。
假设输入图像的横向像素和纵向像素分别为M和N,f(x,y)表示(x,y)点处的像素值(x∈M,y∈N),滤波掩膜的横向像素和纵向像素分别为k和l(k=l,一般为奇数),w(s,t)表示(s,t)点处的像素值。均值滤波法f(x,y)的计算公式为
式中:a=(k-1)/2,b=(l-1)/2。
均值滤波法处理效果见图2,原图背景均匀性较差,经均值滤波法处理后,图像在保证本质特征不变的情况下更加柔和。

图2 均值滤波法处理效果
2)中值滤波法
中值滤波法是一种非线性滤波方法,能有效消除单个突变点。从算法角度考虑,均值滤波法将滤波掩膜内所有点的像素平均值替代图像某点处的原像素值;中值滤波法将掩膜范围内所有点的像素值排序,然后取其中间值替代图像某点处的原像素值。
中值滤波法的计算步骤如下:
(1)将f(x,y)在掩膜范围内所有点的像素值按降序/升序排列,得到序列量G。
(2)令f(x,y)=G(0.5kl+0.5)。
(3)在图像中移动滤波掩膜,使所有点均参与计算。
中值滤波法处理效果见图3,原图背景存在一些尖锐的图像噪声点,经中值滤波法处理后,图像在保证清晰度不变的情况下有效去除了图像噪声点。

图3 中值滤波法处理效果
2.2 图像处理和目标识别
在神经感知系统中,需要将输入信号分解,并使用一组相互独立的响应信号来表示原始信息。将原始图像分解为一组相互独立的响应信息成为图像处理和目标识别的关键。
本文采用主成分分析法(Principal Components Analysis,PCA)和离散余弦变换法(Discrete Cosine Transform,DCT),结合反向传播(Back Propagation,BP)人工神经网络和支持向量机(Support Vector Machine,SVM)对水路中的目标船舶进行检测。
机器视觉模拟算法应具有2 个基本特征[4]:
1)具备一定的普适性和鲁棒性,能自动适应不同的检测对象。
2)具有信息压缩和信息识别等2 个基本阶段。
本文利用PCA 和DCT 图像压缩算法提取数据信息,然后用BP 神经网络和SVM 对视觉信息的识别进行模拟。算法流程图见图4。
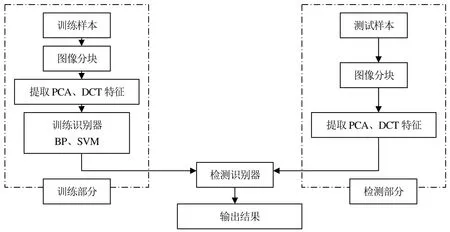
图4 算法流程图
3 效果验证
在AIS与机器视觉检测设备共同工作的情况下,总共测试了50 幅图像,其中目标船舶数107 个,正确识别107 个目标船舶,错误识别0 个目标船舶,虚警数0 个,识别率高达100%。
在关闭桥基站AIS 的情况下(模拟通行船舶AIS 系统故障或故意关闭的情况),总共测试了50幅图像,其中目标船舶数135 个,采用大背景中微小目标检测方法正确识别133 个目标船舶,错误识别1个目标船舶,虚警数1个,识别率高达98.52%。
4 结论
船舶自动识别系统在船舶导航、海上交通管理、港口船舶监控等方面应用广泛。本文基于AIS 与机器视觉检测的船桥智能避碰系统,提出针对大背景中微小船舶目标的检测方法,并给出具体的检测步骤及算法。试验结果表明:单纯视觉检测目标识别率可达到98.52%,AIS 与机器视觉检测设备共同工作情况下识别率可达到100%。本文的研究成果可为船桥智能避碰系统的设计提供一定参考。