轨道式遥控靶车车速控制系统的设计与实现
2023-07-03宁远钊李鹏启吴永胜王旭明
宁远钊,李鹏启,吴永胜,王旭明
(西北机电工程研究所, 陕西 咸阳 712099)
0 引言
轨道式遥控靶车系统主要模拟坦克、装甲车辆等地面运动目标,用以考核各类直瞄武器对移动目标的射击精度,由牵引车、拖车和遥控台3部分组成[1-3],如图1所示。其中,牵引车用于拖动拖车,遥控台是遥控驾驶员的操控终端。
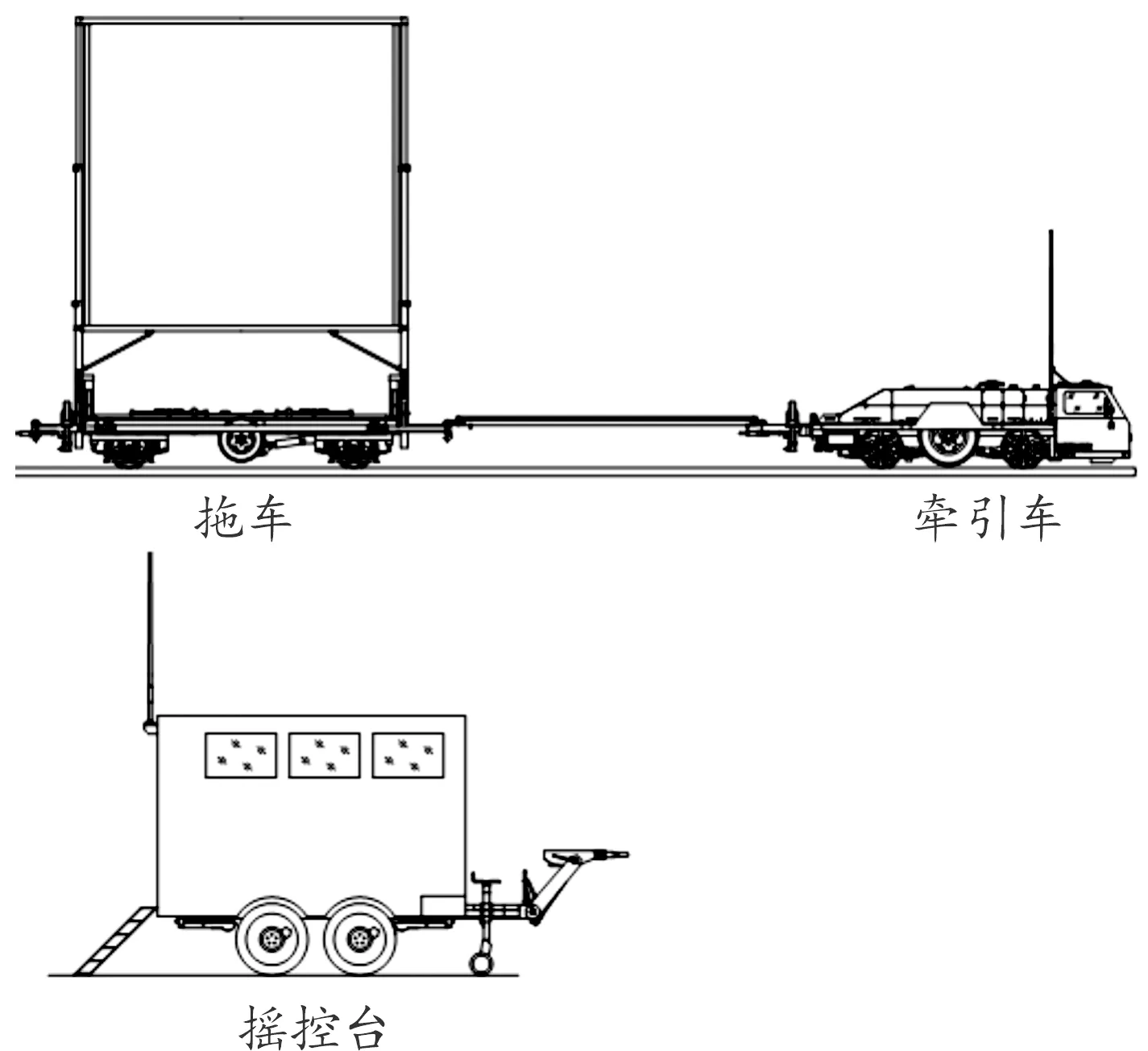
图1 靶车系统组成Fig.1 Composition of rail remote target carrier
牵引车是靶车系统中的动力装备,控制好牵引车发动机以及传动系统传动比是车速控制系统设计的关键。唐平建等[4]通过伺服气缸操纵发动机油门开度,但发动机转速与气缸行程线性程度差,发动机转速控制策略有待优化;刘溧等[5]采用变速箱实现机械式自动换挡,换挡方式依托油门开度和变速器转速双参数设计,传动系统传动比控制相对复杂。在本项目轨道式遥控靶车的设计过程中,发动机和传动比控制方式得到有效改进,文献[4-5]公布的靶车方案中存在的牵引车发动机和传动系统传动比控制相对复杂的工程问题将得到解决。
由于靶车轨道全长1 450 m,为有效拓宽射击窗口期,对遥控靶车的车速控制提出以下指标要求:① 加速和制动性能:在5 t牵引车牵引5 t拖车的情况下,400 m内由静止加速至70 km/h,制动距离小于300 m;② 稳速精度:在牵引车速度70 km/h范围内,速度控制精度小于5%。为满足加速和制动距离短、稳速精度高的性能需求,提出一种通过目标车速控制发动机转速以及泵和马达排量的闭环车速控制方法。
1 车速控制系统
牵引车采用柴油发动机、液压泵和液压马达组成的动力驱动系统,柴油发动机同时驱动2个串联的变量泵,为传动系统提供高压油源;变量泵和变量马达通过高压软管连接,组成闭式传动系统;变量马达驱动牵引车的前后桥,实现前后车轮的驱动。通过控制变量泵和马达的液流方向和排量,从而控制牵引车的行走方向和速度。
牵引车车速控制系统由牵引车控制系统和遥控台控制系统2部分组成,车速控制系统的原理如图2所示。遥控驾驶时,牵引车控制系统通过数传电台接收遥控台发出的指控指令,通过牵引车的控制器实现牵引车控制,同时由数传电台将牵引车的运行状态实时发送至遥控台,并在触摸屏终端进行显示。
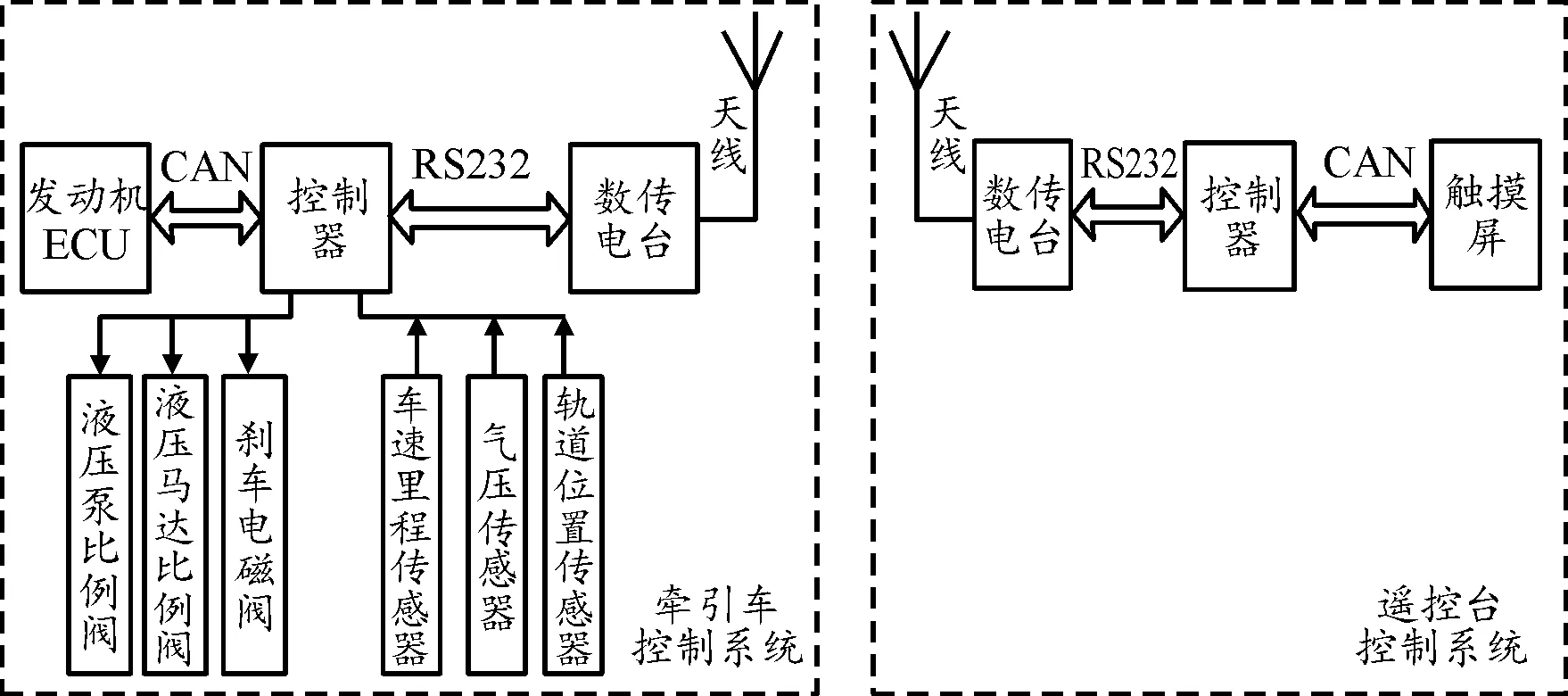
图2 车速控制系统原理框图Fig.2 Schematic diagram of speed control system
牵引车控制系统用于牵引车运行控制和状态信息采集,主要包括控制器、发动机ECU、数传电台、传感器和执行器等。控制器可以接收数传电台的控制指令,根据当前牵引车的运行状态进行安全联锁判断和数据处理,并分别执行油门开度指令、传动比指令和刹车指令,对发动机、液压传动系统和刹车系统进行控制,实现对牵引车运行速度的控制。通过控制器实现牵引车运动的整体思路如下:① 通过CAN总线,发送油门开度等指令到发动机ECU,控制发动机的运行状态,实现对发动机转速的控制;② 通过PWM输出接口控制泵和马达的比例阀,改变泵和马达的排量,实现对液压传动比的控制;③ 通过开关量输出接口直接控制刹车电磁阀,电磁阀驱动刹车气缸活塞杆伸缩,实现对刹车动作的控制。
遥控台控制系统可对牵引车运行方向、行驶速度、制动等进行远程操控,同时对牵引车的运行状态进行监控显示。遥控台控制系统由控制器、触摸屏、数传电台等组成。对牵引车的遥控驾驶可以通过触摸屏输入牵引车运行参数进行程控模式驾驶。
2 车速控制方法
轨道式遥控靶车系统中,牵引车和拖车的运动过程主要分为加速阶段、稳速阶段和制动阶段。考虑到5 t牵引车牵引5 t拖车的实际应用场景,控制过程存在以下难点:① 牵引车和拖车质量大,而轨道表面粘着系数相对偏小,加速能力受到最大粘着力限制;② 快速完成加速过程后进入稳速状态,容易造成缩短加速距离的同时降低稳速精度的结果;③ 高速运行时制动,在惯性作用下,减速容易打滑。对车速的控制既要保证加速和制动距离短,又要保证射击窗口内速度稳定。
为解决上述控制过程难点,提出一种基于目标车速控制发动机转速以及泵和马达排量的闭环车速控制方法,如图3所示。遥控驾驶员通过遥控台发出目标车速指令,牵引车控制器接收到目标车速指令后,根据牵引车行驶状态确定发动机目标转速以及泵、马达排量。发动机目标转速可以通过CAN总线的方式由控制器发送给发动机ECU,泵、马达排量的控制可以用控制器的PWM输出接口通过控制液压比例阀的电流来实现。
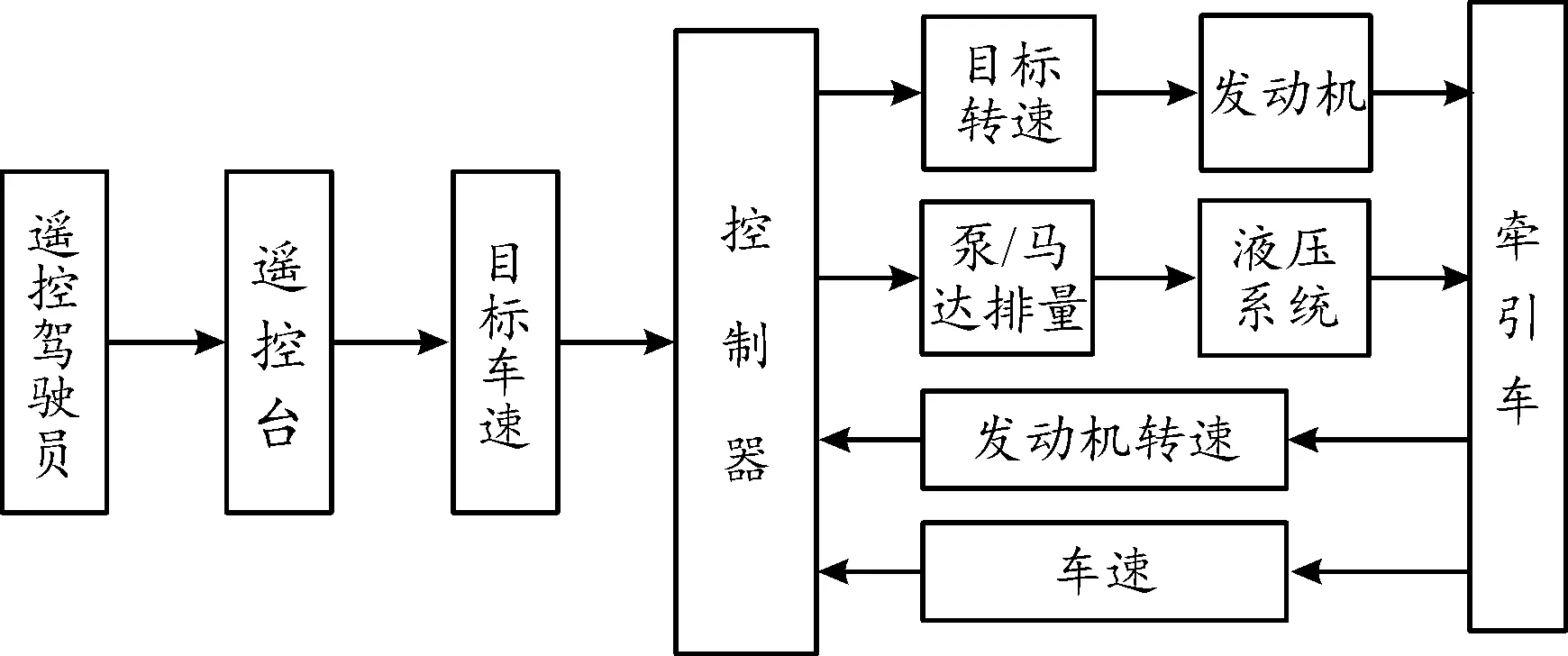
图3 目标车速控制方法Fig.3 Target speed control method
为简化控制算法,控制器首先根据目标车速输入指令直接确定液压传动系统泵、马达的排量以及传动系统的传动比。传动比确定后,车速的精确控制主要依靠对发动机目标转速的修正。根据车速和发动机转速反馈,控制发动机的目标转速从而实现对车速的闭环控制。控制原理如图4所示。实际控制过程中,需要从牵引车的性能参数出发,确定发动机转速的工作范围,依据遥控牵引车的动力性要求选择合理的泵和马达排量组合确定传动比[6-10]。
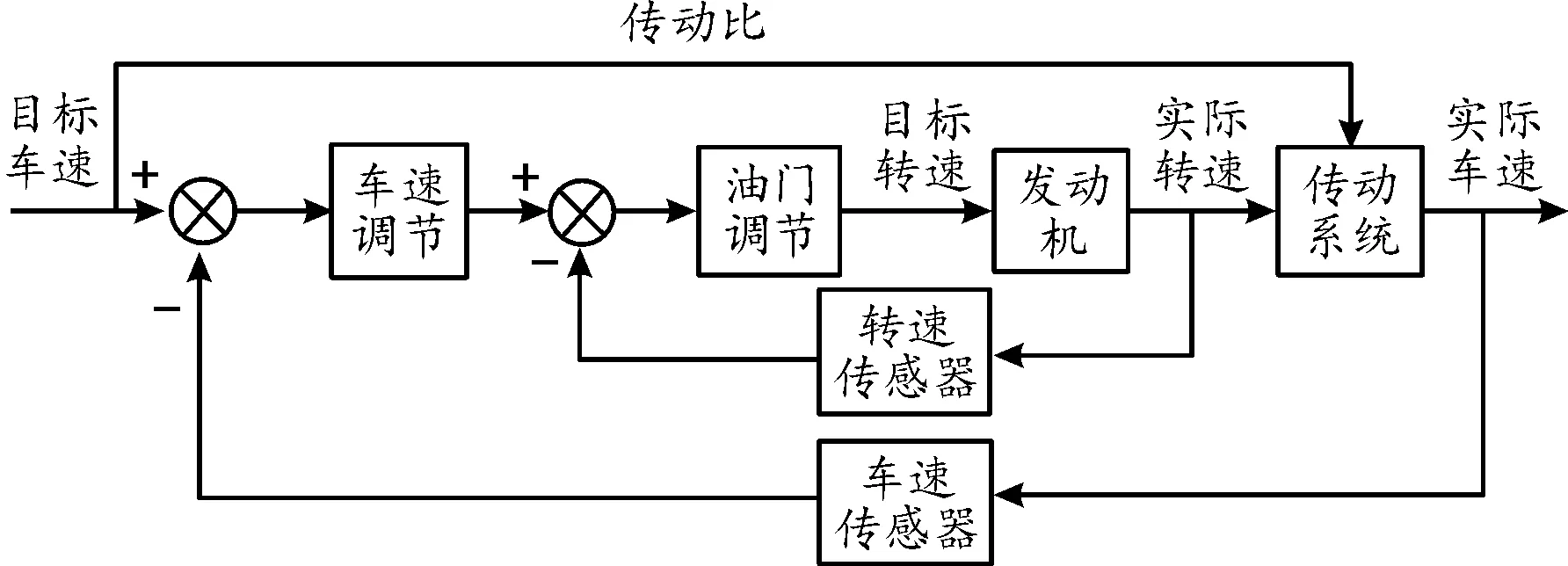
图4 车速控制原理图Fig.4 Speed control schematic diagram
车速的控制允许有稳态误差,可以选用比例或比例微分控制算法[11-13]。经过实际调试试验最后采用了比例控制算法来控制发动机的目标转速。发动机目标转速的计算如式(1)所示:
naim=nfact+kp(vaim-vfact)
(1)
式中:naim和nfact分别为发动机目标转速和实际转速;kp为比例系数;vaim和vfact分别为目标车速和实际车速。
1) 加速阶段
在行驶期间,按照先变泵排量后变马达排量的原则,逐步达到预设的排量和传动比。给泵控制前进的比例阀供电,逐渐增加控制电流,泵输出的流量开始增大,马达输出转速相应增加,车速逐渐增加,从而实现无级变速。当泵工作在最大排量后,逐渐增加马达比例阀的控制电流,马达排量减小,转速和车速逐渐增加。同时,车载控制器每隔一定周期按照式(1)修正发动机的目标转速,并根据目标转速控制发动机的供油量。当车速偏差较大时,比例系数可以选择偏大,修正周期可以选择偏小。而当车速偏差较小时,比例系数可以选择偏小,修正周期可以选择偏大。这种方法可以较好地实现牵引车在低速(目标车速<40 km/h)运行时的加速性能。高速(目标车速≥40 km/h)运行时,在避免打滑现象发生的前提下,可以将发动机的实际转速快速修正到较高转速,有利于发挥发动机的扭矩作用及液压传动系统的加速能力。
2) 稳速阶段
为了达到稳速效果,低速运行时,在控制算法中设置速度偏差死区,当车速达到预期精度后,令式(1)中的比例系数kp为0;而当车速偏差大于偏差死区,则继续周期修正发动机的目标转速,最终达到稳速精度要求。高速运行时,当车速首次达到预期精度后,可将发动机目标转速置为预设转速,该预设转速可通过试验获得。同理,车速偏差大于偏差死区,则继续按公式(1)周期修正发动机的目标转速,直至达到稳速精度指标。
3) 制动阶段
文献[14]采用通过控制刹车气压进行气动刹车制动,当牵引车高速运行时这种传统的气动刹车方案会造成车轮抱死发生滑行[15],一方面容易对刹车片及车轮造成磨损,另一方面打滑距离过长,不利于牵引车和拖车的快速制动。为避免上述问题,采用以下制动控制策略:低速时,主动降速制动,开始减速后,发动机主动降低转速,泵排量逐渐归零,马达逐渐增大排量工作,在闭式回路中,马达在惯性力的作用下,以泵的模式工作,拖动泵和发动机转动,泵和发动机载荷对牵引车起制动作用。高速时,主动降速制动的同时,辅助点动刹车,每隔一定周期对牵引车和拖车的车轮进行持续的气动刹车控制。
图5给出了牵引车前进过程的车速控制流程图。程控模式驾驶牵引车时,首先需要完成发动机启动、气室充气、里程清零等准备工作。遥控驾驶员通过触摸屏输入牵引车运行的目标车速,并按下“开始”按钮。牵引车控制器收到数传电台转发的遥控指令后,根据目标车速指令顺序执行加速和稳速策略。当里程超过1 000 m或接收到“停止”指令等制动信号时,执行制动控制策略,实现牵引车和拖车的制动,前进流程结束。
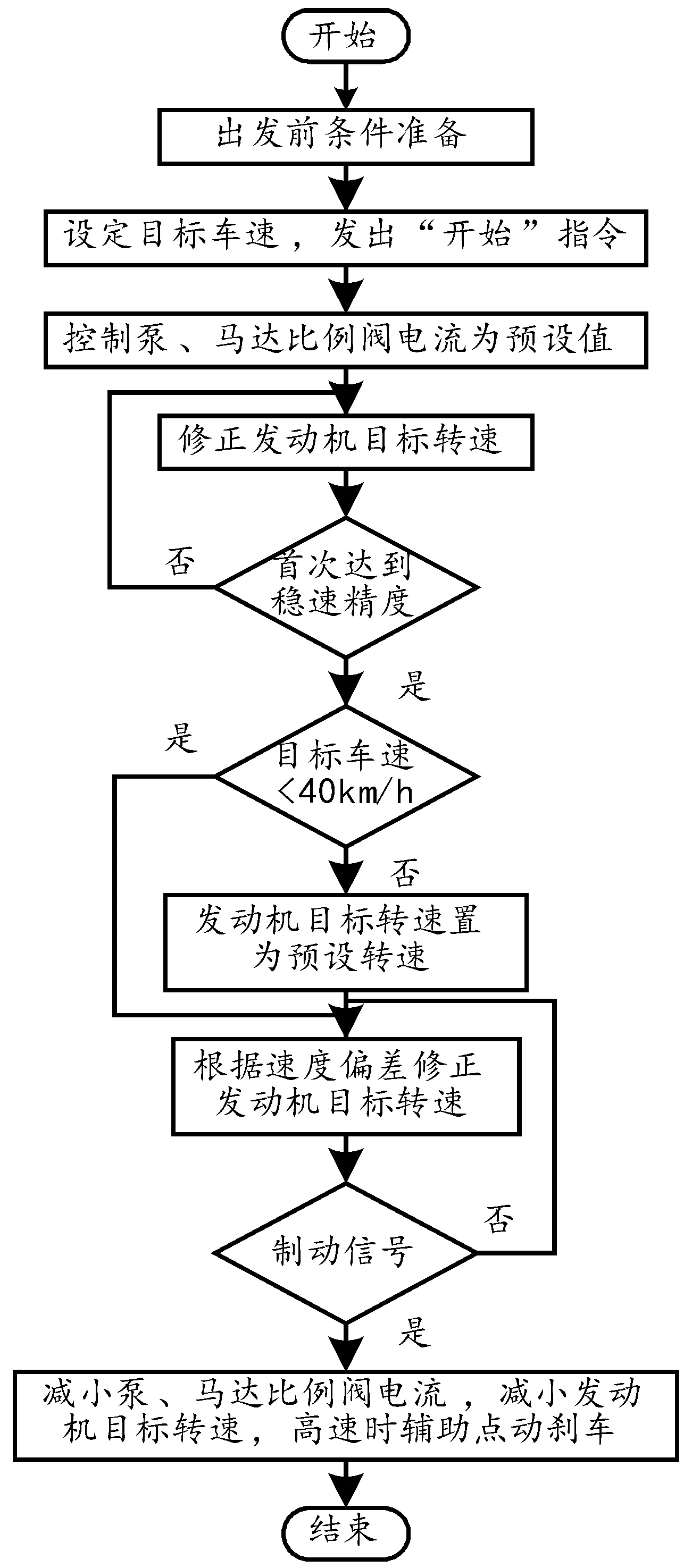
图5 车速控制流程Fig.5 Speed control flow chart
3 试验验证
对靶车的加速性能、制动性能、车速的稳定性能等主要技术指标进行了试验测试。加速和制动距离试验结果见表1。图6是靶车在不同目标车速时测得的车速-里程曲线。可以看出,随着目标车速的增大,加速和制动距离相应地增大。目标车速为70 km/h时,加速距离为337 m,制动距离为223 m。不同目标车速对应的加速和制动距离均满足指标要求。图7给出了靶车在不同目标车速稳速阶段对应的上偏差和下偏差散点图。目标车速为70 km/h时,对应的上偏差和下偏差分别为0.4%和-2.5%。不同目标车速对应的速度控制精度绝对值均小于5%,达到了预期的稳速精度指标。

表1 加速和制动距离试验结果Table 1 Test results of acceleration and braking distance
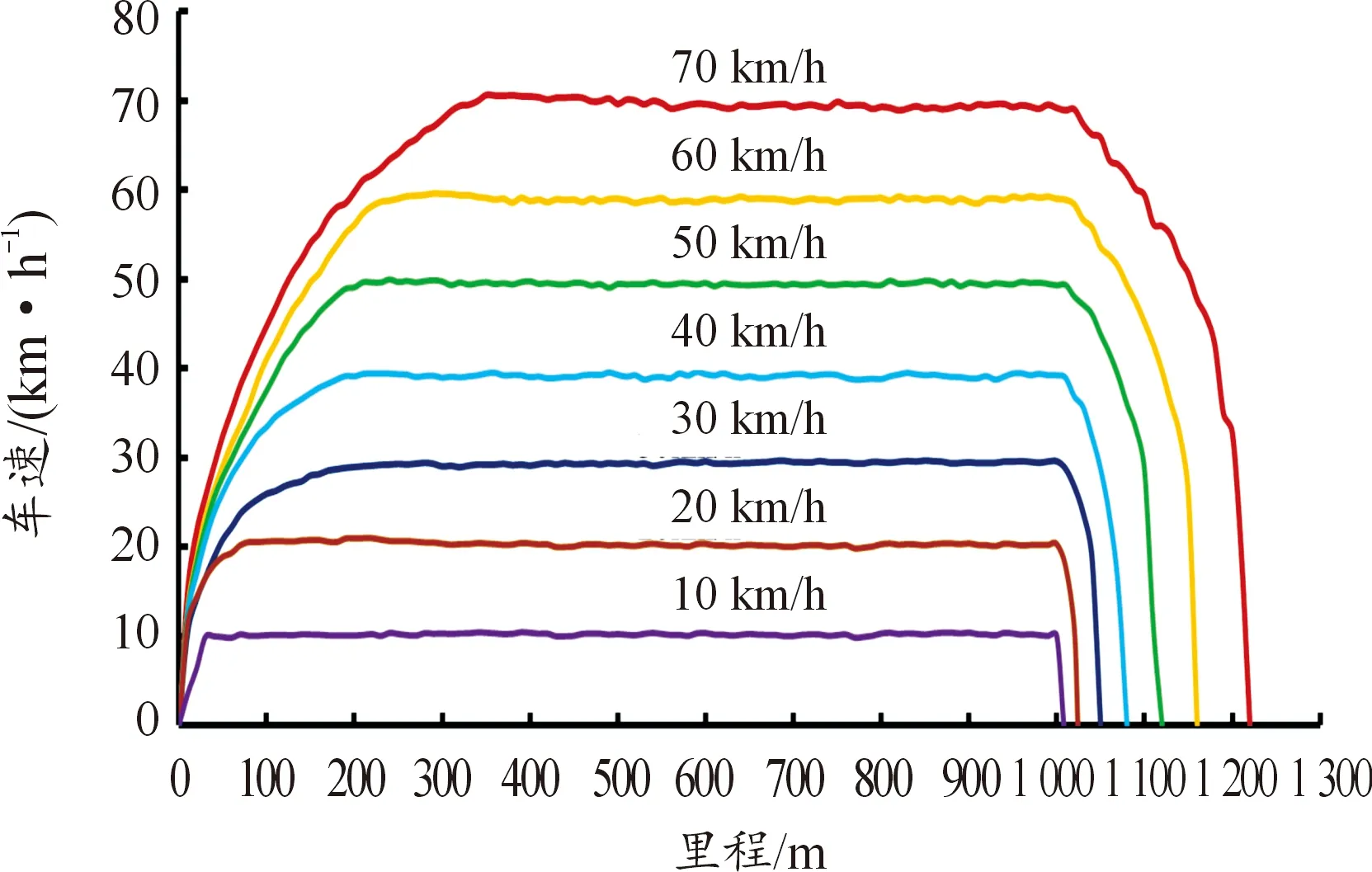
图6 车速-里程曲线Fig.6 Speed-distance curve
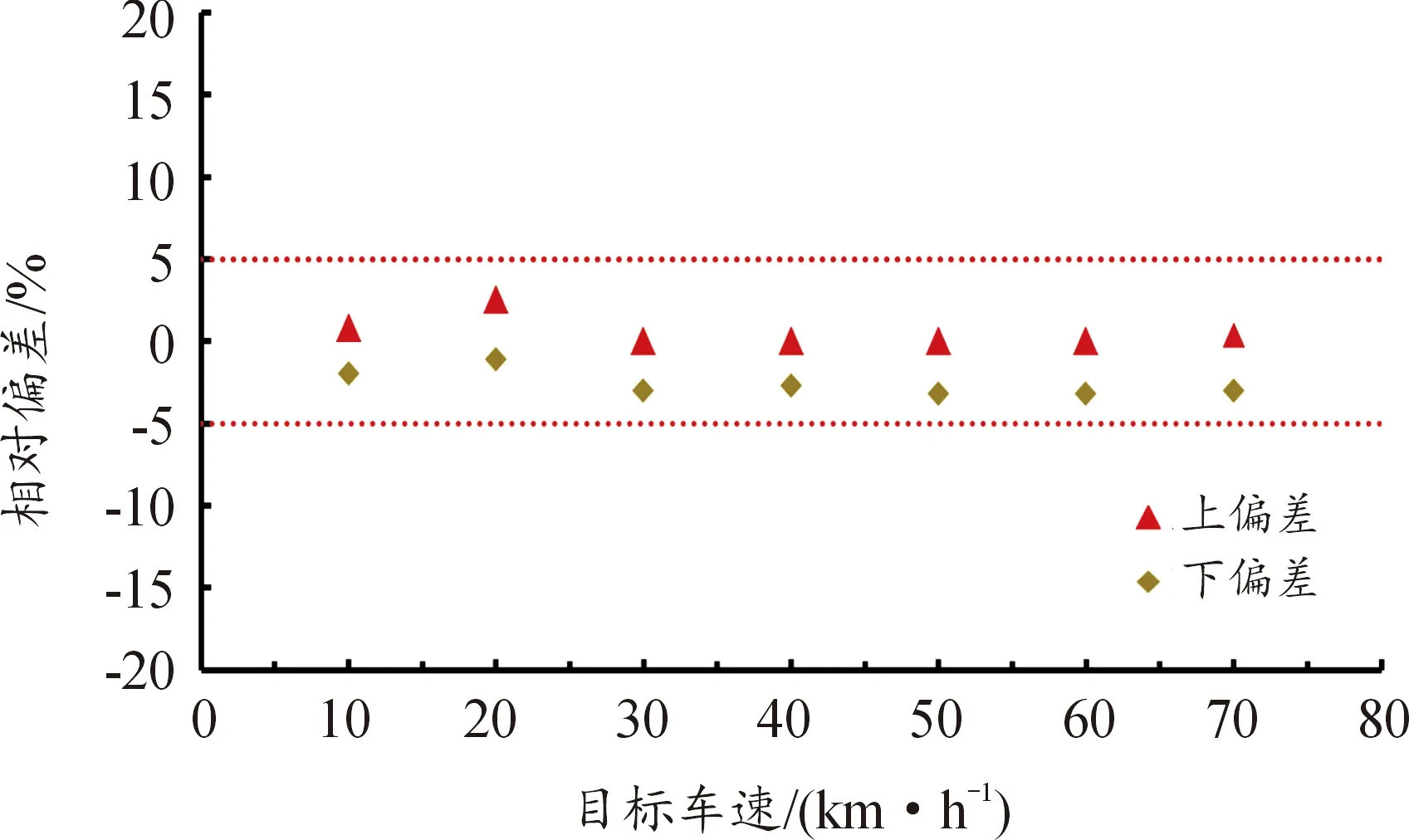
图7 稳速精度散点图Fig.7 Speed stability accuracy scatter diagram
4 结论
1) 设计的车速控制系统稳定可靠,智能化程度高,使用方便。
2) 提出的基于目标车速控制发动机转速以及泵和马达排量的闭环车速控制方法,有效缩短了加速和制动距离,提高了稳速精度。
加速和制动距离、稳速精度均达到了指标需求,可为其他工程车辆的设计改造提供参考和借鉴。
