基于VR技术的建筑室内空间最优布局仿真研究
2023-07-03宋季蓉
沈 雷,宋季蓉,张 丹
(1. 华北科技学院艺术设计学院,河北 廊坊 065200;2. 大连理工大学建筑与艺术学院,辽宁 大连 116024)
1 引言
建筑室内设计的主要目标是在有限的室内空间中,最大限度上满足用户需求[1]。当前,人们对于建筑室内设计的要求逐渐提升,建筑室内设计与装饰行业与相关的布局技术也形成飞速发展的态势[2]。建筑室内空间布局是室内设计的重要环节[3],因此需研究一种具有实际应用性的建筑室内空间最优布局方法。
李琳与王旭鹏将多目标遗传算法引入室内空间布局优化过程中[4],在室内空间数学模型基础上,采用多目标遗传算法解决空间布局问题。刘天亮与顾雁秋等人研究室内空间布局方法[5],基于局部间断性阈值检测生成候选布局方案,在此基础上采用卷积神经网络获取布局类型实现精细布局。但上述布局方法均是在理论上进行布局,若在施工过程中产生偏差,只能返工修改,导致效率大幅下降。同时若用户的理解不到位,则有较大概率导致最终的布局设计结果无法令用户满意。针对这些问题。研究基于VR技术的建筑室内空间最优布局方法,VR技术能够无限接近实际的视觉、听觉、触觉等感受[6],通过交互体验可有效提升用户的满意度。
2 建筑室内空间最优布局方法
2.1 建筑室内空间模型构建
将建筑室内空间环境投影至二维xoy平面中,由此生成一个封闭的空间。为获取建筑室内空间最优布局需对室内空间实施归一化处理[7],确定空间尺度与朝向。将坐标系引入建筑室内空间,设置y轴正方向与坐标原点分别作为建筑室内空间的入户方向与空间顶点的最小坐标,坐标轴的x轴与y轴分别同建筑室内空间的宽度值(W)和长度值(L)相对应。
以(Kx,Ky)表示建筑室内空间的入口坐标,对其实施归一化处理,也就是在建筑室内空间局部坐标系下对入户门坐标信息实施归一化处理。以D、R和S分别表示建筑室内空间形状的伸展度、长宽比以及面积,通过D和S能够分别描述建筑室内空间趋于矩形的水平与无规则边缘形成的多边形面积。
若将建筑室内空间的几何特征表示为F,则其可利用下式描述
F=(Kx,Ky,D,R,S)
(1)
建筑室内空间的功能区域即为建筑室内空间布局对象[8],以
(xp,yp)表示布局对象位置坐标属性,计算公式如下

(2)
式(2)内,x和y分别表示xoy平面内x轴与y轴上布局对象位置点的坐标值,xp与yp的取值范围为[0,1]。若ξp为朝向属性,通过式(3)描述
(3)
式(3)内,ξ表示建筑室内空间中布局对象的朝向角度。
若(lp,wp)为尺寸尺度,通过式(4)描述

(4)
式(4)内,ly和lx分别表示建筑室内空间中布局对象的长度值和宽度值。
基于上述属性能够得到建筑室内空间中布局对象M的布局属性π(M)
π(M)=(xp,yp,ξp,lp,wp)
(5)
针对将要进行布局的建筑室内空间,通过虚拟现实平台导入其二维图纸,定义布局对象的布局属性,生成建筑室内空间的三维空间模型。
2.2 布局元素的3D模型构建
根据所构建的三维空间模型,以布局对象的布局属性为约束,对不同布局对象内的布局元素进行一比一建模,并实施渲染与烘焙处理。
在3D Studio MAX平台内构建布局元素3D几何模型,确定布局元素形状特征提取的过程为
i=0,1,2,…,L-1
(6)
以布局元素属性特征Q(i)为基础进行布局元素光学成像的立体匹配,由此实现布局元素的画面效果渲染,完成建筑室内空间布局对象内不同布局元素的色彩、形态与图案等的立体匹配[9],在构建布局元素的多层次细节过程中选用分离面裁剪方式,通过设定属性值确定颜色的匹配度,确定函数表达式如下
(x,y)={g(x,y)-1g(x,y)-Lee(x,y)≥t
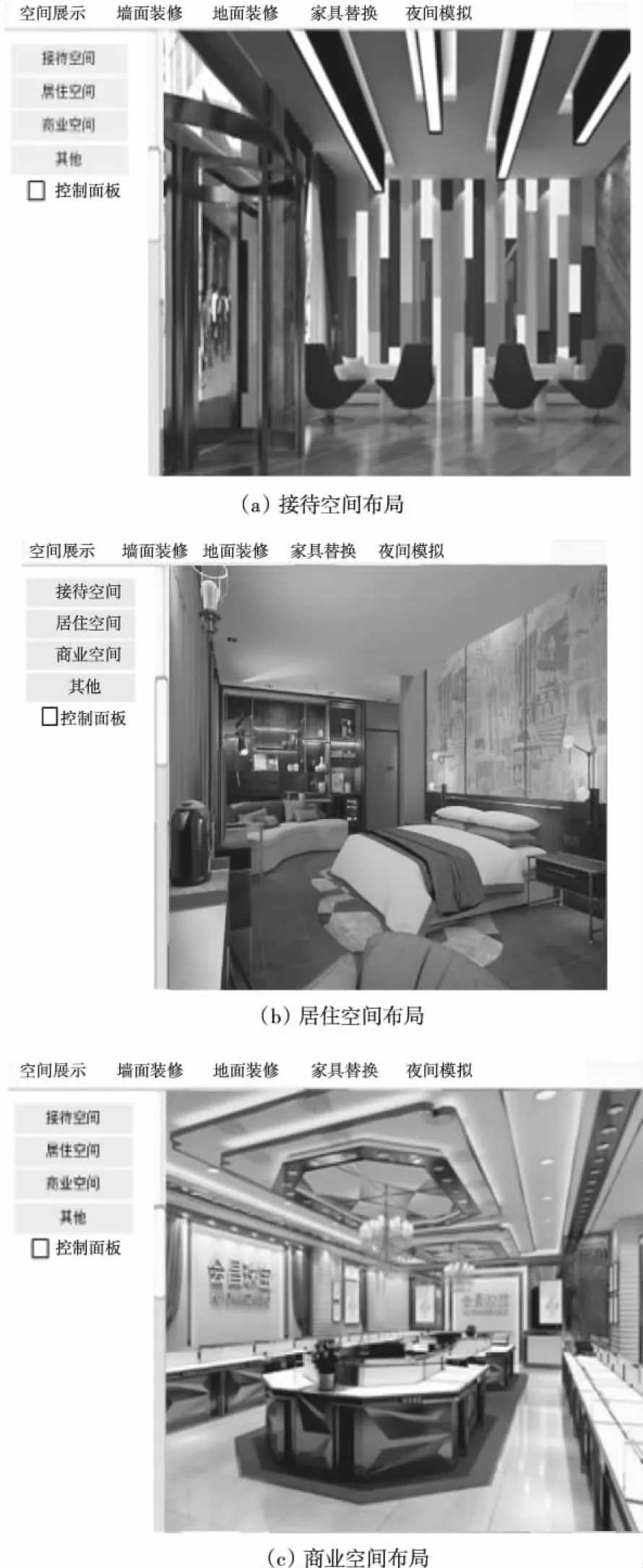
g(x,y)+1g(x,y)-Lee(x,y) g(x,y)else (7) (8) 布局元素模型构建过程中,可依照建筑室内空间的不同用途,不同风格以及个人喜好等构建不同样式的布局元素模型,以此构建布局元素模型数据库,基于该数据库能够实现建筑室内空间不同局部对象内各类布局元素的随意调用,由此获取最优布局方案。 在上述构建布局元素模型数据库内选取合适的布局元素,将该布局元素的3D模型导入虚拟现实平台内实施编辑,定位布局元素模型,编辑界面,生成建筑室内空间布局场景的交互效果,设置运行窗口,利用双目摄像机进行漫游控制,发布可交互的建筑室内空间布局场景。 双目摄像机漫游控制是通过同时控制两个虚拟单目摄像机的位置与位姿完成建筑室内空间三维布局场景漫游[13]。依照其运动特性,结合导航手柄漫游控制的便利性要求,提出基于六自由度虚拟机器人的运动控制方法,以虚拟机器人控制取代摄像机漫游控制,完成建筑室内空间布局漫游控制。以prs和pls分别表示转回角矢量和视线向量,利用这两个参数能够描述双目摄像机的漫游位姿转变情况[14]。基于此在构建三维摄像机局部坐标系过程中,可利用这两个参数分别作为z轴与x轴,由此利用一个虚拟的杆件取代三维虚拟摄像机。 虚拟机器人的前三个关节是确定其末端位置的关键,通过输入设备得到;后三个关节是完成布局场景交互漫游控制过程中摄像机自转、摇摆与俯仰控制的关键,由操作人员确定。由输入设备获取位置坐标,将位置控制点定义为新的局部坐标系,在此基础上将设备的自转、摇摆与俯仰角度作为已知量构建末端杆件姿态矩阵,对其进行求解可确定末端杆件的姿态,由此确定建筑室内空间布局场景的交互漫游控制过程中摄像机的位姿表达式。 以第六杆件为布局场景的交互漫游控制过程中双目摄像机的对应杆件,其位置与位姿受第四杆件与第五杆件的影响。以∂表示第四杆件以Z轴为中心的自转角度,控制双目摄像机的自转运动;以φ表示第五杆件以Z轴为中心的旋转角度,其主要功能为控制双目摄像机的俯仰运动;以σ表示第六杆件以z轴为中心的旋转角度,用于控制双目摄像机的摇摆控制。以4P0表示第四杆件相对于基坐标系的位置,其在x轴、y轴与z轴的分量分别以Px、Py和Pz表示。通过输入设备确定σ、φ、σ和4P0,并将它们作为摄像机实施运动控制的已知条件。依照虚拟机器人不同杆件间的运动关系能够确定不同虚拟杆件间的齐次变化矩阵,公式描述如下 (11) 上述公式内,R(A,ε)和Trans(A,δ)分别描述局部坐标系绕A轴旋转ε角所构成的旋转矩阵和依A轴平移δ所形成的平移矩阵。基于上述过程,依照DH运动学方法得到布局场景的交互漫游控制过程中双目摄像机的位姿,公式描述为 (12) 在建筑室内空间布局场景的交互漫游控制下,实现布局对象中不同布局元素的显隐、布局元素材质的替换以及不同元素的替换与调整的功能,最终发布可交互的建筑室内空间布局场景。 1)不同布局元素的显隐。用户在了解建筑室内空间布局的相关信息时,既可以获取空间布局的渲染效果,还能够确定空间内不同布局对象中不同局部元素的结构,提升用户对于空间布局了解的清晰度与透彻性,以此提升用户的安全感。 2)布局元素材质的替换。建筑室内空间布局中不同局部对象内不同元素材质的替换功能能够令用户根据自身需求与喜好布局室内空间,提升用户对于空间布局的满意度[15]。确定布局元素与相应的几块材质贴图,通过点击物体的相应组件你能够将其更换成不同的材质。 3)不同布局元素的替换与调整。建筑室内空间布局过程中,用户根据自身喜好对不同布局对象内各类布局元素进行替换与调整,不仅可以充实空间布局的功能,还可令用户产生身临其境感,提升用户的对于空间布局的参与度与满意度,获取最优布局方案。 实验为验证本文所研究的基于VR技术的建筑室内空间最优布局方法在实际空间布局中的应用效果,以某高层建筑为仿真对象,采用本文方法,利用3D MAX软件与虚拟现实平台对其室内空间进行布局,所得结果如下。 针对仿真对象内的接待空间、居住空间与商业空间,采用本文方法进行空间布局。针对不同布局对象内的不同元素构建三维模型并进行渲染,结果如图1所示。 图1 布局元素模型构建与渲染 由图1得到,采用本文方法能够准确构建不同布局元素的三维模型,并对模型进行渲染,获取充分接近现实的布局元素。汇集所构建的布局元素模型,构建布局元素模型数据库。图1所示为仿真对象空间内不同布局对象中布局元素的处理。 由图2得到,采用本文方法能够实现不同布局元素的显隐与替换处理,满足实际布局应用需求。 图2 布局元素的处理 针对仿真对象,基于不同布局对象内不同布局元素的处理,得到仿真对象内各类空间的布局结果,如图2所示。 由图3得到,采用本文方法对仿真对象进行布局时,针对不同的空间类型,利用VR技术,通过颜色与光线的搭配得到较好的视觉冲击效果,最大限度上接近真实的布局效果,通过布局元素的处理能够得到适用于该空间类型的最优布局结果。 图3 空间布局结果 建筑室内空间模型构建的准确度是本文方法有效实现的基础,为评价本文方法建筑室内空间模型构建的准确性,以室内空间布局属性还原度为评价指标,对采用本文方法构建的仿真对象室内空间模型进行评价,还原度取值在[0,100]区间内,取值越高表示本文方法所构建的建筑室内空间模型真实度越高。所得结果如图4所示。 图4 还原度计算结果 分析图4能够得到,采用本文方法确定的仿真对象内不同局部对象的布局属性的还原度均高于96%,均值达到97.5%左右,由此证明本文方法所构建的仿真对象空间模型真实度较高。 以文献[4]中采用多目标遗传算法的布局方法和文献[5]中基于由粗至精的布局方法为对比方法,对比本文方法与对比方法在进行仿真对象空间布局过程中的布局属性计算效率、布局元素信息饱和度以及布局场景交互漫游控制中的规划均方根误差,所得结果如表1所示。 表1 性能对比测试结果 分析表1得到,本文方法进行仿真对象室内空间布局的各项性能指标均优于两种对比方法,由此说明本文方法的可应用性更强,在建筑室内空间布局中具有较好的应用前景。 本文研究基于VR技术的建筑室内空间最优布局方法,在建筑室内空间模型构建基础上,构建布局元素三维模型,生成布局元素数据库,通过对不同布局元素的处理与布局场景的交互获取最优布局方案。实验结果显示采用本文方法进行布局过程中视觉效果较好,能够最大程度上接近实际现实世界中的布局效果,在建筑室内空间布局中具有较好的应用前景。
2.3 生成可交互的布局VR场景


3 仿真分析
3.1 空间布局结果


3.2 还原度客观对比

3.3 性能对比

4 结论